1
Изобретение относится к электроэнергетическим установкам, например, судовым.
Известна электроэнергетическая установка, содержащая асинхронный генератор, установленный на валу приводного двигателя переме1шой скорости, в которой нагрузка генератора регулируется изменением сопротивления в цепи ротора, что приводит к значительным активным потерям в роторе, снижает КПД установки,- при этом рабочий диапазон изменения скорости входного вала невелик .1.
Известна электроэнергетическая установка, содержащая электрогенератор, который приводится в действие первичным двигателем, входной регулятор, управляющий величиной входного сигнала первичного двигателя, схему регулирования скорости, которая предназначена для определения рассогласования между сигналом, соответствующим заданной скорости, и сигнале.
соответствующим реальной скорости, схему регулирования нагрузки, определяющую рассогласование между сигналом, соответствующим заданной величине нагрузки, и сигналом, снимаемым с нагрузки, причем больший из двух выходных сигналов схем регулирования нагрузки и скорости подается через амплитудный селектор на входной регулятор и.
Такое устройство должно содержать собственный регулируемый двигатель, что затрудняет использование устройства на движущихся объектах (судах, железнодорожном транспорте) из-за больших габаритов и веса дсяюлнитель- ного двигателя. Еюльшая экономичность валогенераторов по сравнению с дизельгенераторами, тем более, что описанное вьпие устройство не может работать без мощдого генератора переме1шого тока стабильного напряжения и частоты, приводит к целесообразности использования Б качестве первичного двигателя ocHOBHoix) вала движущегося объета, т.е. использования асинхронного генератора как валогенератора.
Наиболее близкой по технической сущности к настоящему изобретению
является электроэнергетическая установка, содержащая приводной двигател переменной скорости, биротативный асинхронный генератор, подключенный к сети, ротор которого установлен
на валу привода переменной скорости, а статор - на валу управляемого привода, и регулятор скорости 3J.
В указанной установке не обеспечивается требуемая точность регулирования нагрузки при работе генератора на мощную сеть.
Цель изобретения - повышение точности регулирования нагрузки при работе генератора на мощную сеть.
Эта цель достигается в электроэнергетической установке, содержащей приводной двигатель переменной ско рости, биротативнЬгй асинхронный генератор, подключенный к сети, ротор которого установлен на валу привода переменной скорости, а статор установлен на валу управляемого привода, и регулятор скорости.
Новым в установке является то, что она снабжена регулятором нагрузки и сумматором, а регулятор скс ооти выполнен трехвходовым, причем выходы регулятора скорости и регулятора нагрузки включены на входы сумматора, вьисод которого связан со входом исполнительного органа управляемого привода, входы регулятора скорости связанысоответственно с валом при- водного двигателя переменной скорооти, с валом управляемого привода и с выходом асинхронного генератора.
С целью повышения точности поддержания скорости,регулятор скорости с держит биротативный тахогенератор,рот которого установлен на валу привода переменной скорости, биротативный синхронный двигатель, статор которого ра.сположен на валу управляемого привода, а ротор установлен на допойни- тельао введенном валу, на котором установлен и статор биротативного та- хогенёратора, прячем выход тахогенератора подключен на первый вход дополнительно введенного сумматора, на второй вход которого подключен вход задатчика скорости.
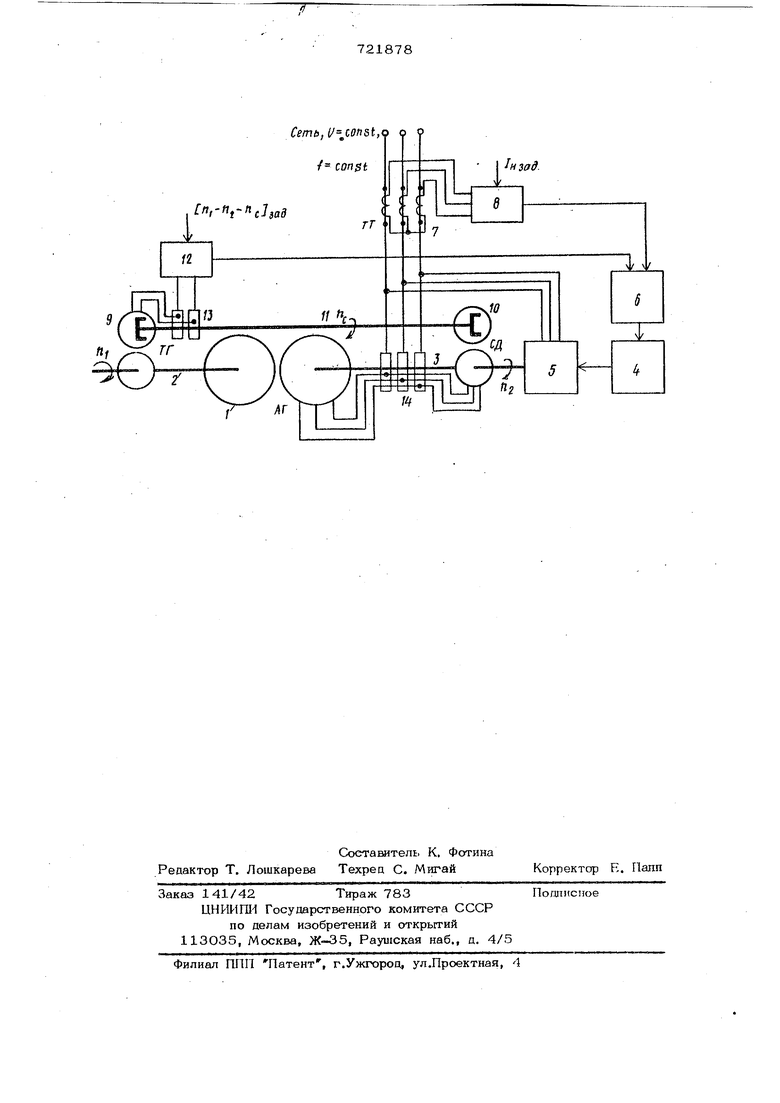
На чертеже представлена схема электроэнергетической установил согласно изобретению.
Ротор биротативного асинхронного генератора (АГ) 1 приводится во вращение от вала 2 первичного двигателя. Статор генератора 1 посажен на вал 3 управляемого привода. Управляемый привод состоит из регулятора 4 и исполни- , тельного органа 5. На вход регулятора 4 поступает сигнал от сумматора 6 имеющего два входа. На один из них подводится сигнал от регулятора нагрузки, состоящего из токового трансформатора (ТТ) 7 и схемы сравнения 8 нагрузки, а на другой вход сумматора 6 подается сигнал от регулятора скорости, который состоит из тахогенератора (ТГ) 9, синхронного двигателя (СД) 10, причем статор тахо- генератора 9 и ротор синхрюнного двигателя 10 имеют общий вал 11 и сумматор 12.
Сигнал, вырабатываемый тахогене- ратором 9, снимается с контактных колеп тахогенератора 13. Электроэнергия, генерируемая биротативным АГ 1, отводится от контактных колец 14, расположенных на валу управляемого привода.
Регулирование нагрузки генератора основано на управлении величиной скольжения генератора. Активная мощность Р, отдаваемая генератором, равна:
,(1)
где М - электромагнитный момент сопротивления вращению статора АГ относительно его ротора; U) - круговая скорость вращения
магнитного поля статора АГ оносительно его ротора. Так как частота сети постошша, то из упрощенной формулы Клосса 2М.,
М
.
(2)
где М( S - критический момент и скольжение асинхронной маши- ны,следует, что электромагнитный момент И, а значит и мощность Р зависят от скольжения генератора, которое в данном случае определяется по формуле:
(3)
с
Hg- CHiixpoHEian скорость вращения магнитного поля статора АГ относительно его ротора; Ц - нерегулируемая скорость вращения первичного двигателя; - скорость вращения статора АГ.
Из (1), (2), (3) ясно, что, изменяя скорость вращения статора АГп« , мы будем регулировать нагрузку Р генератора. Схема.регулирования на-
грузки представляет собой обратную ;вязь по отклонению, а схема регулирования скорости - компаундирующую связь.
Для понижения чувствительности
Схема регулирования скорости вьшол- нена так, чтобы скорость вращения статора тахогенератора 9 относительно его ротора была равна . Технически проще было бы измерять и регули- ровать скорость вращения статора АГ относительно его ротора, т.е. величину . Hi Пэ г что также обеспечило бы управление скольжением (см. формулу (3)) и нагрузкой. Но в процессе изменения
нагрузки АГ от нуля до номинальной величины при посто5ганой скорости tt вв личина Hj-hi изменяется на 5-7%, т.е. ошибка измерительной схемы на 1% приведет к неточности поддержания за- данного скольжения на 15-20%. Величина же во всем диапазоне изменения нагрузки меняется от О до 1ОО%, т.е. погрещность схемы измерения скорости в 1% ведет к такой же неточности (в 1%) поддержания нужКой величины скольжения.
Измерение относительной скорости обеспечивается подключением статора тахогенератора 9 к валу упра&лаемого привода 3 через синхронный двигатель 10, запитываемый переменным током синхронной частоты. При этом скорость вращения его ротора относительно неподвижной опоры равна (;, а относительно ротора тахогенератора 9 - п,-Пз,-Ис.
Наличие в устройстве двух каналов регулирования обеспечивает хорошие динамические качества системы, Исполь зование двух каналов регулирования делает систему управления более надежной, а качество регулирования сист««1ы
(быстродействие, статическую точность)выше. Формула изобретения
1.Электроэнергетическая устано&ка, содержащая приводной двигатель переменной скорости, биротативный. асинхронный генератор, подключенный к сети, ротор которого установлен на валу привода переменной скорости, а статор установлен на валу управляемого привода, и регулятор скорости, отличающаяся тем, что, с целью повышения точности регулирования нагрузки при работе генератора на мощную сеть, установка снабжена регулятором нагрузки и сумматором, а регулятор скорости вьшолнен трехвходовым, причем Шз1ходы регулятора скорости и регулятора нагрузки включены на входы сумматора, выход которого связан со нходом исполнительного органа управляемого привода, входы регулятора скорости связаны соответственно с валом приводного двигателя переменной скорости, с валом управляемого привода и с выходом асинхронного генератора.
2.Установка поп. l,oтличaю щ а яс я тем, что с целью повышения точности поддержания скорости, регулятор скорости содержит бирота- тивный тахогенератор, ротор которого установлен на валу привода переменной скорости, биротативный синхронный двигатель, статор которого расположен на валу управляемого привода, а ротор установлен на дополнительно введенном валу, на котором установлен н статор биротативного тахогенератора, причем выход тахогенератора подключен на первый вход дополнительно введенного сумматора, на второй вход которого подключен вход задатчнка скорости.
Источники информации, принятые во внимание при экспертизе
1.Яворский А. Г. и др. Применени навешанных генераторов н пути автоматизации судовых электростанций. Судостроение, № 9, 1959.
2.Патент 51понии № 49-22362, кл. 55 ВО, 1874.
3.Патент США № ЗО54941, кл. 322-47, 1962. Cefnb,l/ const,o о / con$t P 

| название | год | авторы | номер документа |
|---|---|---|---|
| Электроэнергетическая установка | 1977 |
|
SU721889A1 |
| Устройство для регулирования числа оборотов асинхронного двигателя | 1977 |
|
SU871746A3 |
| УСТАНОВКА ДЛЯ ПИТАНИЯ АВТОНОМНЫХ ОБЪЕКТОВ | 1969 |
|
SU233050A1 |
| РЕГУЛЯТОР ЧАСТОТЫ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 1998 |
|
RU2151460C1 |
| Способ регулирования источника реактивной мощности при его совместной работе с асинхронным генератором | 1989 |
|
SU1617531A1 |
| АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1998 |
|
RU2130226C1 |
| ЭЛЕКТРОМАШИННЫЙ АГРЕГАТ ДЛЯ ПОЛУЧЕНИЯ ПОСТОЯННОЙ ЧАСТОТЫ | 1973 |
|
SU372637A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электромеханический накопитель энергии в сети переменного тока | 1977 |
|
SU720620A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |