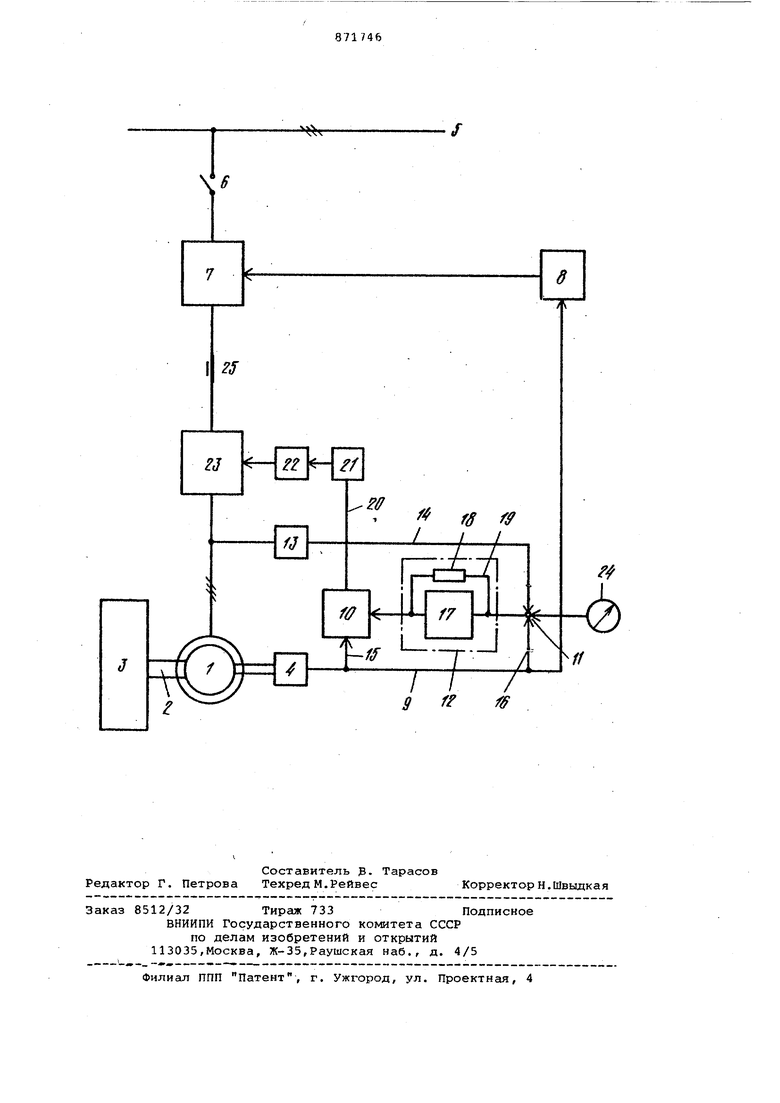
(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ АСИНХРОННОГО ДВИГАТЕЛЯ Изобретение относится к электротехнике и может быть использовано в частотно-регулируегиых электроприводах на базе асинхронного двигателя. Известно устройство для регулирования числа оборотов асинхронного двигателя, содержащее блок измерения тока, выход которого через блок сравнения соединен с блоком задайия частоты скольжения. Выход последнего через сумматор частоты, куда подсоединен выход тахогенератора, подключен к блоку регулирований частоты преобразователя, к которому подключен асинхронный двигатель l Недостатком известного устройств является то, что в результате быстр го изменения на грузки, частота преобразователя изменяется практически безынёрционно,а ток - нет,, что может привести к уменьшению перегрузоч ной способности двигателя и его опрокидывания в переходном режиме. Известно также устройство для ре гулирования числа оборотов асинхронного двигателя с короткозамкнутым ротором и тахогенератором на валу, содержащее инвертор тока, к выходу которого подключен асинхронный двига тель, а вход через катушку индуктивности соединен с регулируемом выпрямителем, управляющая цепь которого соединена с блоком регулирования тока асинхронного двигателя, блок измерения напряжения на зажимах асинхронного двигателя, сумматор частот, к одному входу которого подключен выход тахогенератора, к другому блок задания частоты скольжения, а выход сумматора частот соединен с управляющим входом инвертора тока, причем к первому входу блока задания частоты скольжения подсоединен выход тахогенератора 2. Недостатком известного устройства является то, что в результате внезапного изменения момента нагрузки быстро изменяется ток, и.Появляются имтгульсы перенапряжения на инверторе, что снижает его надежность. Цель изобретения - повышение надежности устройства. Эта цель достигается тем, что в указанном устройстве к второму входу блока задания частоты скольжения подсоединен выход блока измерения напряжения на зажимах асинхронного двигателя. Кроме того, блок задания частоты скольжения выполнен в виде пропорционального регулятора. На чеотеже представлена схема предлагаемого устройства. Устройство содержит асинхронный двигатель 1. В этом предпочтительном варианте выполнения имеется в виду трехфазный двигатель, работающий как в режиме двигателя, так и в режиме генератора. Он может иметь преимущественно короткозамкнутый ротор. Его роторный вал 2 связан с нагрузкой 3 и тахогенератором 4. Тахогенератор 4 формирует либо постоянное напряжение, пропорционально скорости вращения poTop i двигателя либо вырабатывает трехфазный ток, который затем выпрямляется. Сеть 5 трехфазного тока через двухпозиционный переключатель б под ключе.на к регулируемому выпрямителю 7, управляющие входы которого соеди нены с блоком 8 регулирования тока. Выход тахогенератора 4 с помощью пр вода 9 подсоединен к сумматору 10 и Кблоку 11 задания частоты сколь жения, выход которого соединен с вх дом управления регулятором 12 тока возбуждения. К блоку 11 подключен блок 13 измерения напряжения на зажимах асинхронного двигателя. В ток подводы 14, 15, 16 к регулятору 12 и сумматору 10 могут быть промежуто но включены не изображенные регулир емое сопротивления для установления желаемых констант с , С 2, С так, что к точке блока 11 через токоподвод 14 прикладывается сигнал С.U (Ug - напряжение на зажимах статора и через токоподвод 16 сигнал , а к сумматору 10 через токоподвод 15 прикладывается сигнал CjU(U выходное напряжение тахогенератора пропорциональное скорости вращения ротора) . С 2 и C-j могут при известны условиях быть равной величины. Регу лятор 12 может иметь операционный усилитель 17 с Нехарактеристикой, образованной резистором 18, который с помощью провода 19 связывает вход и выход усилителя. Выход регулятора 12 подсоединен к входу 20 сумматора 10, выход кото рого через преобразователь напряже ние-частота 21 и распределитель 22 импульсов соединен с инвертором 23 тока. Устройство содержит блок 24 ЗсЩ&ния частоты скольжения и дроссе 25 цепи питания инвертора. Устройство работает следующим образом. Усилитель 17 Формирует на выходе сигнал постоянного напряжения, пропорциональный отклонению регулируем величины, т.е. разнице С . . Она определяет частоту скольжения ротора, которая подводится к втором входу сумматора 10 для сложения с проходящим по токоподводу 15 сигналом СдУц постоянного напряжения. Регулятор 12 выполнен таким образом, что частота скольжения ротора постоянно меньше разницы частот между критической и синхронизирующей точками характеристики момента вращения - частота статора двигателя 1 так, что двигатель 1 при допустимых нагрузках не превышает предельное скольжение. Ток возбуждения, регулируе1 ый посредством регулятора 12, при постоянной скорости вращения ротора, т..е. при U const, устанавливается на неизменное значение. В очень широком диапазоне скоростей вращения ток возбуждения остается неизменным независимо от нагрузки. Нацряжение на зажимах двигателя 1 образуется в соответствии с током статора и частотой скольжения ротора. С помощью регулятора 12 путем воздействия на частоту скольжения ротора при данной скорости вращения оно удерживается приблизительно постоянным. Регулирование происходит таким образом, что при каждой скорости вращения, устанавливаемой заданной величиной, при Номинальном крутящем моменте имеет место приблизительно оптимальная частота скольжения ротора для оптимального использования двигателя 1. Разница прикладываемая к блоку 11, способствует при этом тому, чтобы напряжение на зажимах двигателя 1 изменялось пропорционально скорости вращения ротора. Выход сумматора 10 подключен к преобразователю 21, выход которого посылает импульсы управления постоянной амплитуды, частота которых пропорциональна входному напряжению преобразователя 21. Эти импульсы управления через распределитель 22 прикладывается к ключам статического инвертора 23, образующего шедтиимпульсный , полностью управляемый мост трехфазного тока, для получения трехфазного тока статора асинхронного двигателя 1. Для пуска двигателя 1 необходимо, чтобы регулятор 12 к началу пуска задавал скольжение ротора, что достигается с помощью включаемого лишь на короткое время для пуска блока 24. Поясним подробнее регулирование тока возбуждения, под которым понимается чистый реактивный ток двигателя. ., ., . Вектор lg (g 1ок статора, - ток ротора, 1 - ток возбуждения). Для безукоризненной работы асинхронного двигателя необходимо точно так же как и при шунтовой машине постоянного тока. - чтобы всегда имелось достаточно энергии возбуждения. Но в шунтовой машине постоянного тока относительно просто, поскольку икеются раздельные зажимы якоря и контура возбуждения, добиваться постоянного возбуждения независимо от нагрузки. Асинхронный двигатель, напротив, имеет общие зажи1 ъ для в.сех токо.в , т.е. и для токов ротора (ток ротора является пропорциональным моменту вращения тока нагрузки), и для тока возбуждения, так что ток возбуждения асинхронного двигателя при постоянной скрости вращения ротора не может независимо от тока ротора воспринимать воздействие или соответственно поддерживаться постоянным. Однако это достигается с помощью регулятора 12. Предпосылкой при этом является то обстоятельство, что при каждом изменении нагрузки на протяжении короткого времени, например от 0,1 до 0,2 с, сохраняется приблизительно постоянный ток статора за счет сглаживания тока катушкой индуктивности дросселя 25, Происходящее в асинхронном двигателе разделение тока статора на ток возбуждения и ток ротора (ток нагрузки/ осуществляется с помощью регулятора 12 путем изменения частоты скольжения ротора. Постоянный ток возбуждения и тем самым постоянная ЭДС (.векторная электродвижущая сила) достигается путем изменения тока ротора. Ток ротора со своей стороны через сопротивление R , ( ротора и тем caNWM посредством частоты uf скольжения ротора испытывает воздействие таким образом, что ток возбуждения всегда и независимо от нагрузки сохраняет свое оптимальное значение (R - общее эквивалентное активное сопротивление ротора; fg - частота тока статора, u.f - часR - собсттота скольжения ротора; венное сопротивление ротора).
Регулирование тока возбуждения им ет, во-первых, цель, создать благоприятный динамический режим асинхронного двигателя , приблизительно соответствующий режиму шунтовой машины постоянного тока, во-вторых, это регулирование тока возбуждения имеет цель при данной скорости вращения поддерживать приблизительно постоянным напряжение на зажимах и при внезапном изменении нагрузки. Напряжение на зажимах изменяется соответственно устанавливаемой скорости вращения ротора, а именно, приблизительно пропорционально скорости вращения ротора. Благодаря регулятору 12 удается при постоянной -скорости независимо от тока ротора поддерживать ток возбуждения приблизительно постоянным. Это объясняется следующим образом. Предполагаетсяf что асинхронный двигатель 1 с постоянной скоростью вращения приводит в действие постоянную нагрузку Если затем наступает йнезапное уменьшение
нагрузки, например происходит сбрасывание нагрузки, то благодаря катушке индуктивности (дросселя 25) ток статора еще короткое время, например целесообразно 0,05-0,2 с, остается приблизительно постоянным. Скорость вращения ротора за это короткое время может повыситься также лишь относительно незначительно. Регулятор 12 при этом работает безынерционно таким образом, что напряжение на за0жимах, несмотря на сбрасывание нагрузки и незначительное повышение скорости вращения, остается всегда пропорциональным скорости вращения. Этого он достигает благодаря тому, что
5 выходное напряжение тахогенератора 4 изменяется пропорционально незначительному повышению скорости вргодения и соответственно безынерционно увеличивается внутреннее сопротивление
0 двигателя 1. Увеличение внутреннего сопротивления достигается благодаря уменьшению частоты скольжения ротора. Одновременно , однако с определенной задержкой, через регулятор тока снижается ток статора и тем самлм момент
5 вращения двигателя 1 настолько, что снова достигается установленная згщанная скорость вращения. Без регулятора 12 вследствие произошедшего изменения Нагрузки напряжение на статоре
0 сразу же сильно бы возросло, что, например может легко привести к разрушению ключей инвертора 23. Однако регулятор 12 поддерживает напряжение -на статоре, несмотря на внезапную
5 перемену нагрузки приблизительно постЪянным. С уменьшением нагрузки ротор сразу же начинает повышать скорость своего вращения с последующим уменьшением частоты сколожения ротора ,
0 то вследствие этого внутреннее сопротивление двигателя 1 сильно у вели- чивается и соответственно резко начинает повышаться напряжение на статоре. Это повышение напряжения на статоре происходит намного быстрее,чем
5 повышение скорости вращения ротора, так что на входе регулятора 12 появляется также отклонение регулируемой величины, что с помощью регулятора 12, сумматора 10, преобразователя 21,
0 распределителя 22 частота управления инвертора 23 практически безынерционно повышается таким образом, что частота скольжения ротора вследствие повышения частоты статора становится
5 несколько больше. Но с увеличением частоты скольжения уменьшается внутреннее сопротивление двигателя, вследствие чего напряжение на статоре вновь снижается. Из-за этого вновь
0 уменьшается отклонение регулируемой величины, так что частота скольжения становится меньше, напряжение на статоре затем снова возрастает. Эти процессы происходят так быстро,что
5 напряжение на статоре даже при внезапйой крайней перемене нагрузки постоянно и без появления пиков напряжения регулируется на приблизительно постоянное значение, тем самым ток возбужления также регулируется Ма приблизительно постоянное значение независимо от нагрузки; так что можно говорить также о регулировании тока возбуждения, хотд сам ток возбуждения не измеряется, внутреннее сопротивление двигателя 1 изменяется в среднем временном значении в соответствии с изменение тока статора, наступающим вследстви изменения нагрузки. Таким образом, несмотря на внезапное сбрасывание нагрузки, уменьшается номинсшьное п вьиаение напряжения на статоре двига теля 1 и вместе с тем, ток возбужде ния независимо от нагрузки поддержи вается близким к постоянному. В результате достигается тот эффект, что при любых изменениях нагрузки, даже при самых быстрых, напряжение на статоре и ток возбуждения при да ной скорости вращения остаются приб лизительно постоянными и не могут наступить опасные перенапряжения. Регулирозгание скорости вращения зна чительно инерционнбе, чем регулирование тока возбуждения, и согласно описанному начальному процессу до тех пор уменьшает ток статора, пока ток статора вновь не будет соответствовать уменьшенной или недостающе нагрузке асинхронного двигателя. С другой стороны, если наступает внезапное повышение нагрузки, напри мер внезапное начало нагрузки, то сразу же повышается частота скольже ния ротора, чем сильно уменьшается внутреннее сопротивление двигателя и уменьшается напряжение на статоре и т.д., так что регулятор 12 практи чески безынерционно регулирует такж приблизительно постоянное напряжени на статоре и тем самлм приблизитель но постоянный ток возбуждения. Блок повышает ток 8 статора до тех .пор, пока он не достигнет велич ны, необходимой для более высокого момента вращения. Преимуществом регулирования тока возбуждения двигателя 1 является такжето, что частота скольжения ротора При постоянном моменте дви.гателя 1 независимо от скорости вра щения ротора приблизительно постоян на и изменяется, таким образом, лиш в зависимости от момента вращения. Это дает значительные преимущества также и для запуска и стабилизации регулирования при динамических процессах. Таким образом, достигается тот эффект, что при данном номинальном токе и соответственно при данной номинальной нагрузке имеет место частота скольжения ротора, наиболее благоприятная ля работы асинхронного двигателя. Это легко достигается надлежащим согласованием констант С , С и Сд, причем С,2 и Сд могут быть равны по величине. Регулятор 12 в данном примере выполнения является многоусиливающим П-регулятором, при этом имеет место лишь очень незначительный диапазон пропорциональности этого регулятора, так что в стационарных рабочих режимах отклонение регулируемой величины практически равно нулю и тем ca№tM практически . Разумеется,величину регулируемого тока возбуждения целесообразно настраивать на номинальное возбуждение, заданное изготовлением асинхронного двигателя. Вместо П-регуляторов кюгут быть предуслютрены также другие подходящие регуляторы, предпочтительно ПИ-регуляторы. Хотя скорость вращения двигателя 1 может предпочтительно регулироваться, но предлагаемое устройство обладает преимуществом и в том случае, если заданное значение скорости вращения не изменяется и частота статора отклоняется от частоты сети. До тех пор пока благодаря выпрямителю 7 напряжение тахогенератора 4 растет пропорционально скорости вращения ротора и напряжение на статоре при этом может повышаться пропорционально скорости вращения ротора, максимально отдаваемая мощность асинхронного двигателя 1 возрастает пропорционально скорости, вращения ротора и снова понижается с уменьшением скорости вращения ротора пропорционально к ней. Кроме того, устройство позволяет дополнительно к этому диапазону регулирования скоростей вращения предусмотреть еще и другой, более высокий диапазон регулирования скоростей вращения асинхронного двигателя, в котором максимально отдаваемая мощность машины остается постоянной. Это достигается благодаря тому, что в токопроводе 16 промежуточно подключен предпочтительно регулируемый, не показанный на чертеже ограничитель напряжения, который, начиная с заранее определенной скорости вращения ротора, препятствует повьвиению напряжения в токопроводе 16 , если скорость вращения ротора возрастает и далее, т.е. в этом верхнем диапазоне скорости вращения напряжение в токопроводе 16 поддер- . живается постоянным. Благодаря такому токоограничителю в токопроводе 16 в этом верхнем диапазоне скорости вращения асинхронный двигатель сохраняет режим, приблизительно соответствующий режиму шунтовой машины постоянного тока в диапазоне регулирования скорости вращения, который характеризует, так называемый, диапазон ослабления поля, благодаря чему в другом диапазоне регулирования скорости вращения , к которому напряжение в токополводе 16 изменяется пропорционально выходному напряжению тахогенератора 4, двигатель поддерживает режим, приблизительно соответствующий режиму шунтовой машины постоянного тока, в так называемом, диапазоне регулирования якоря.
Сумматор 10 суммирует подводимые к нему сигнсшы. Если сигнал,поданный к нему от регулятора 12, является отрицательным, что имеет место в режиме генератора из-за перемены напряжения на зажимах двигателя 1, то это соответствует сложению отрицательного сигнала с принятым положительным, поданным к сумматору 10 от тахогенертора 4 через токопровод 15. Отрицательное сложение может быть также обозначено как вычитание, так что по суммированием в этом случае следует понимать также как принцип действия вычитания. Таким образом, вместо тог чтобы производить отрицательное сложение , можно также предусмотреть чтобы выход регулятора 12 при переходе от режима двигателя к режиму генератора не менял своей полярности причем в этом случае сумматор 10 при этом переходе следует переключать с суммирования на вычитание, или вмдсто этого в токопровод, проходящий от регулятора 12 к сумматору 10, при режиме генератора можно дополнительно включить инвертор, лишь в режиме генератора инвертирующий выходной сигнал регулятора 10.
Таким образом, за счет регулирования скольжения при изменении напряжения на зажимах двигателя исключается перенапряжение на плечах инвертора и повышается, его надежность.
Формула изобретения
1.Устройство для регулирования числа оборотов асинхронного двигатвг ля с короткозамкнутым ротором и тахогенератором на валу, содержащее инвертор тока, к выходу которого
0 подключен асинхронный двигатель, а вход через катушку индуктивности соединен с регулируемым выпрямителем, управлякадая цепь которого соединена
с блоком регулирования тока асинхрон5ного двигателя, блок измерения напряжения на зажимах асинхронного двигателя, сумматор частот, к одному входу которого подключен выход .Тахогенератора, к другому - блок задания
0 частоты скольжения, а выход сумматора частот соединен с управляющим входом инвертора тока, причем к первому входу блока задания частоты скольжения подсоединен выход тахогенератора, отличающееся
5 тем, что, с целью повышения надежности устройства, к второму входу блока задания .частоты скольжения подсоединен выход блока измерения напряжения на зажимаьх асинхронного
0 двигателя.
2.Устройство по п. 1, отличающееся тем, что блок задания частоты скольжения выполнен в виде пропорционального регулятора.
5
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1463344, кл. 21 С 59/10, 1912.
2.Патент ФРГ 2234681, кл, Н 02 Р 5/36, 1972.
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| Привод агрегата для производстваХиМичЕСКиХ МОНОНиТЕй | 1978 |
|
SU844641A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |