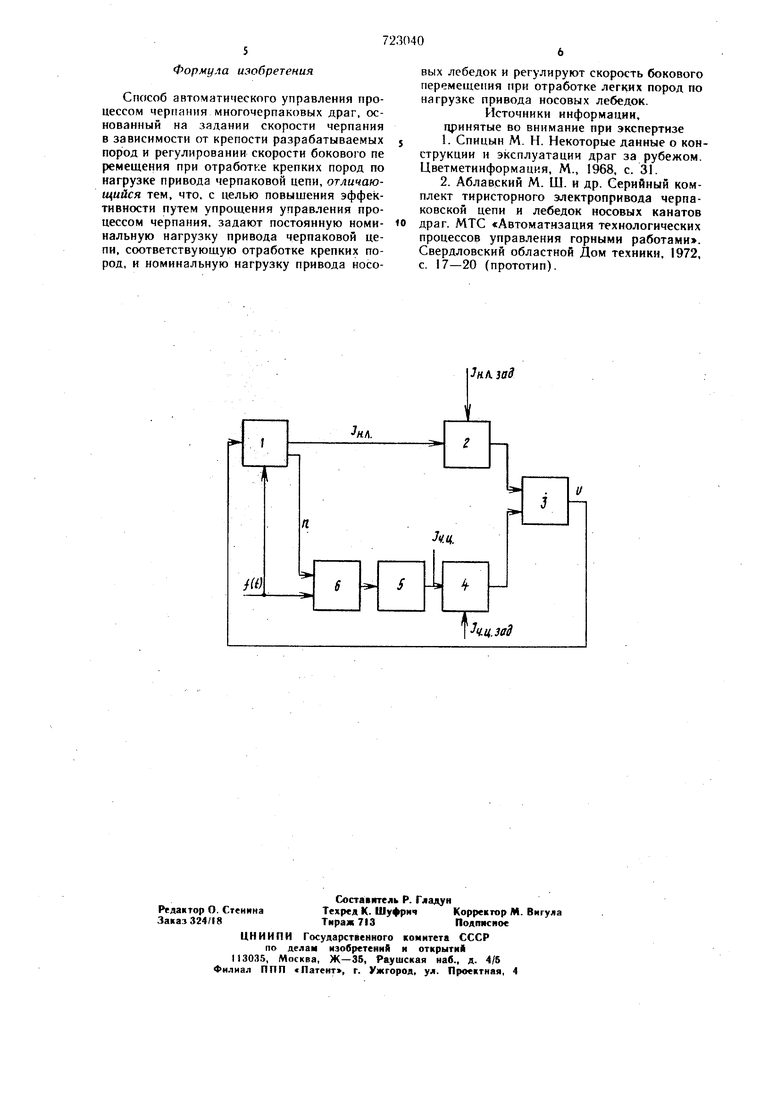
ке легких пород по нагрузке привода носовых лебедок. Способ на известных зависимостях величин нагрузочных моментов приводов черп.аковой цепи и носовых лебедок от скорости бокового перемещения: для привода черпаковой цепи в рабочем диапазоне нагрузок нагрузка прямопропорциональна скорости бокового перемещения, а для привода носовых лебедок нагрузка практически не зависит от скорости бокового перемещения, пока нет снятия пород боковой поверхностью черпаков, а при скоростях, обусловливающих снятие, нагрузка связана со скоростью квадратичной зависимостью. При отработке труднодрагируемых пород нагрузка привода носовых лебедок меньше заданной и от скорости привода не зависит. Нагрузка привода черпаковой цепи пропорциональна скорости бокового перемещения, и потому регулированием удерживают ее заданное значение. При отработке легкодрагируемых пород, когда нагрузка привода черпаковой цепи не достигает заданной величины, увеличивают скорость бокового перемещения до тех пор, пока нагрузка носовых лебедок не достигнет заданной. Осуществляют это либо путем снятия пород боковой поверхностью черпака, либо вследствие накапливания пород черпаковой рамой срезанных, но не оттранспортированных в бочку пород. При этом регулятор настраивают так, чтобы он обеспечивал максимальную скорость бокового перемещения, при нагрузках приводов черпаковой цепи и носовых лебедок меньщих заданных значений, а при превышении нагрузки одного из приводов задания снижал скорость бокового перемещения. При превыщении нагрузкой привода носовых лебедок заданной величины скорость бокового перемещения снижают и поддерживают на уровне, соответствующем заданному. При изменении крепости пород переход от регулирования по нагрузке привода черпаковой цепи к регулированию по нагрузке пргшода носовых лебедок осуществляется автоматически, без участия оператора. Эффективность управления обусловливается тем, что при отработке труднодрагируемых пород производительность по.адерживается максимально возможной по энергетическим возможностям привода черпаковой цепи, а при отработке легкодрагируемых пород производительность максимальна по условию транспортной способности черпающего органа. На чертеже представлено устройство для реализации способа, которое работает следующим образом. Нагрузку IH.A. привода носовых лебедок 1 подают на элемент сравнения 2 с сигналом заданной,нагрузки IHA., выполненный так, что выходной сигнал на нем появляется ТОЛЬКО при превышении. сигналом 1н.л.сигнала задания. Выходной сигнал элемента сравнения 2 подают на вход регулятора напряжения 3 двигателей носовых лебедок. На другой вход регулятора напряжения 3 подают сигнал с выхода элемента сравнения 4, где сигнал 1ч.и,. нагрузки привода черпаковой цепи 5 сравнивается с сигналом, задающим нагрузку привода черпаковой цепи 1ч.ц.4Ална выходе элемента сравнения 4 сигнал появляется также в случае превышения Гццзаданной величины. Регулятор напряжения 3 настроен так, что его выходное напряжение U максимально при нулевых значениях обоих входных сигналов, а повышение значений любого из них ведет в снижению якорного напряжения и. Поэтому перегрузка любого из приводов 1 или 5 ведет к сниже){ию якорного напряжения и и как следствие к снижению скорости привода носовых лебодок. При отработке легкодрагируемых пород нагрузка 1чц привода черпаковой цепи 5 ниже заданной, поэтому выходной сигнал элемента сравнения 4 равен нулю. Если при этом нагрузка 1н.л.ниже заданной, то выходной сигнал элемента сравнения 2 также равен нулю и скорость п принимает максимальное значение. Это приводит к накапливанию неотранспортированного грунта и увеличению нагрузки 1и.лДО тех пор, пока ее значение не превысит заданное, после чего появляется выходной сигнал элемента сравнения 2, воздействующий на регулятор 3. Напряжение и снижается, падает скорость п, т. е. в этом случае регулирование осуществляется по нагрузке привода носовых лебедок. По мере повышения крепости пород (возникающий сигнал f(t)) увеличивается нагрузка 1ц.1;.до тех пор, пока ее значение не превысит заданного, вследствие чего возникает сигнал на выходе элемента 4, воздействие которого вызывает снижение напряжения и и скорости п. Снижение обусловливает срабатывание накопленного перед черпаковой рамой грунта и вследствие этого, снижается нагрузка 1нл.. Одновременно воздействие через драгу 6 на привод черпаковой цепи 5 приводит к снижению нагрузки 1ии,до заданной, т. е. в этом случае регулирование скорости осуществляется по нагрузке привода .черпаковой цепи 1ч.а Переход от регулирования по нагрузке IH.U,. к регулированию по нагрузке осуществляется автоматически без изменения заданий. Использование способа позволяет повысить производительность драги путем обеспечения максимального наполнения черпаков при отработке легкодрагируемых пород.
5 Формула изобретения
Способ автоматического управления процессом черпания миогочерпаковых драг, основанный на задании скорости черпания в зависимости от крепости разрабатываемых пород и регулировании скорости бокового пе ремещения при отработке крепких пород по нагрузке привода черпаковой цепи, отличающийся тем, что, с целью повышения эффективности путем упрощения управления процессом черпания, задают постоянную номинальную нагрузку привода черпаковой цепи, соответствующую отработке крепких пород, и номинальную нагрузку привода носо723(40
вых лебедок и регулируют скорость бокового перемещения при отработке легких пород по нагрузке привода носовых лебедок.
Источники информации, принятые во внимание при экспертизе
1.Спицын М. Н. Некоторые данные о конструкции и эксплуатации драг за рубежом. Цветметинформация, М., 1968, с. 31.
2.Аблавский М. Ш. и др. Серийный комплект тиристорного электропривода черпаковской цепи и лебедок носовых канатов драг. МТС «Автоматизация технологических процессов управления горными работами. Свердловский областной Дом техники, 1972, с. 17-20 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом драгирования | 1983 |
|
SU1105556A1 |
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Черпающее устройство драги | 1977 |
|
SU732450A1 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
JHA зад
