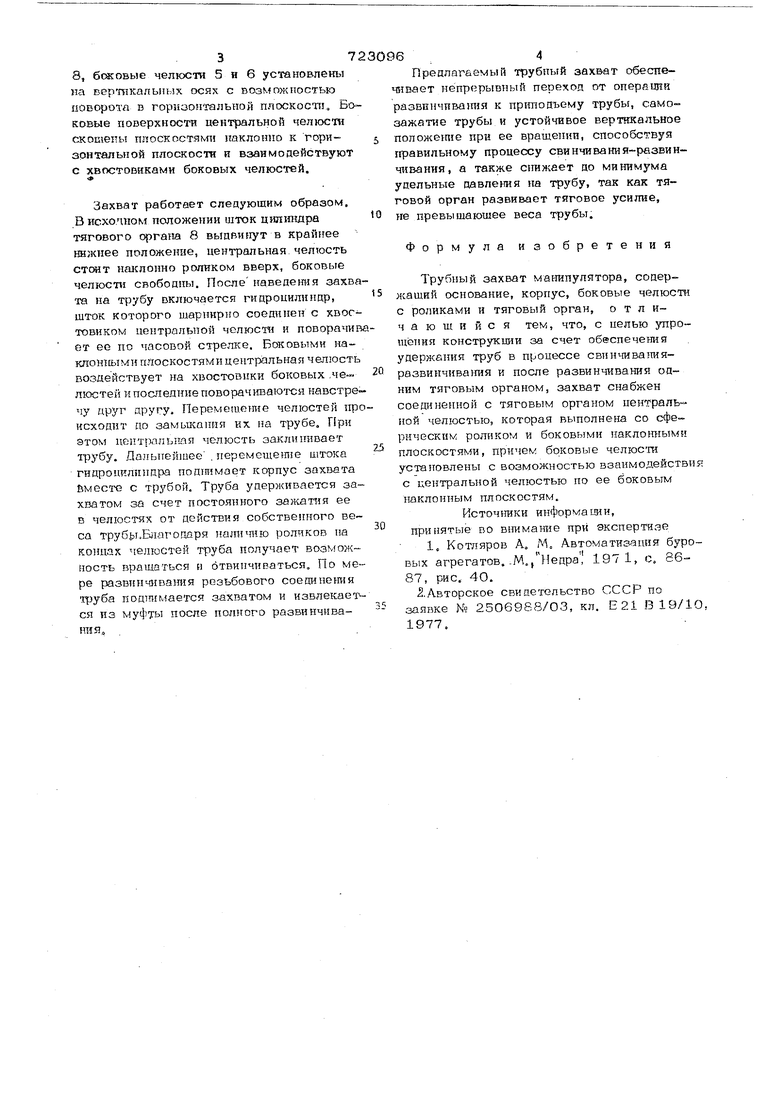
Изобретение относится к машиностроению и предназначено , в астностт. для использования в манипуляторах, которыми оснащаются агрегаты подземного ремонта нефтяных скважин. Известно устройство для захвата труб содержащее корпус и тяговый орган (Y. Недостатком устройства является невозможность совмещения операции отвинчивания с одновременным приподъемом трубы, как это необходимо в процессе ра ганчявания насосно-компрессорных труб при ремонте нефтяных скважин. Наиболее близким техническим решением к предлагаемому является устройство для захвата труб, содержащее основание, корпус, бсжовые челюсти с роликами и тяговый орган 2j . Недостапсом такого згстройства являетс то, что для приподаема отвинченной трубы требуется дополнительный тяговый орган. Цель изобретения - утфошение конструкции захвата за счет обеспечения. удержания труб в процессе свиичиванияазвинчивания и после развиншвания одним тяговым органом. Это постигается тем, что захват снабжен соепиненной с тяговым органом центральной челюстью, которая выполнена со сферическим роликом и боковыми наклонными плоскостями, причем боковые челюсти установлены с возможностью взаимодействия с иентральной челюстью по ее боковым (иклонным плоскостям. На фиг. 1 изображен предлагаемый зазахват, общий вид; разрез; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2. Захват содержит основание 1, корпус 2, центральную челюсть 3 со сферическим роликом 4, боковые челюсте 5 и 6 с роликами 7 и тяговые органы (например, гидроцилиндр) 8. иентральная челюсть 3 установлена на горизонтальной оси с возможностью поворота в вертикальной плоскости, ее хвостовик соединен с тяговым органом 8, бсасовые челюсти 5 и 6 установлены на вергакапьнь.х осях с возможностью поворота в горизонтальной плоскосП о Бо ковые поверхности центральной челюсти скопюпы ппоскостями паклонпо к горизонтальной плоскости н взаимодействуют с хвостовиками боковых челюстей. Захват работает следующим образом. В исходном положении шток цилтщра тягового oprafia 8 выдвинут в крайнее Нижнее положение, нейтральная челюсть стоит ншслонно роликом вверх, боковые челюсти свобоаны. После Haeeaemia захв га на трубу включается гиароиилннцр, шток которого шарнир)го соетишн с хвос товиком иентралыюй челюса-и и нoвopa ra ет ее по часовой стрелке. Боковыми наклошымиппоскостямицентральная челюсть воздействует на хвостовики боковых .че- люстей и поел едкие поворачиваются навстре чу друг другу. nepe vieiuemie челюстей пр исходит по замыкания их па трубе. При Этом ненттмльпля челюсть закл;пгавает трубу. Далытейшее . перемещегше штока гицроцилппдра поднимает корпус захвата Вместе с трубой. Труба удерживается за хватом за счет постоянного заисатия ее в челюстях от действия собственного веса трубькБлагоцаря нашпшю роликов па концах челюстей труба получает возможность гфащаться и отвинчиваться. По ме ре развинчивания резьбового соеаипею1я труба подтвдмается захватом и извлекает ся из муфты после нолтого развинчиваПредлагаемый трубный захват обе-спечиЕает непрерывный переход от операипи развнпчиваш1я к пр1шодъему трубы, самозажатие трубы и устойчивое вертикальное положега1е при ее вращепип, способствуя гфавильному процессу свинчивания-р 1звинчивания, а также С1гажает до минимума удельные давления на трубу, так как тяговой орган развивает тяговое усилие, не превышаюшее веса трубы. Формула изобретения Трубный захват манипулятора, содержащий основание, корпус, боковые челюсти с роликами и тяговый орган, о т л ич а ю ш и и с я тем, что, с нелью упрощения конструкции за счет обеспечения удержания труб в процессе свингмватшяразвинчивания и после развинчивания одним тяговым органом, захват снабжен соеданенной с тяговым органом нейтральной челюстью, которая выполнена со сферическим роликом и боковыми наклонными плоскостями, причем боковые челюсти установлены с возможностью взаимодействия с центральной челюстью по ее боковым Наклонным плоскостям. Источники информации, принятые во В1шманне при экспертизе 1. Котляров А. М„ Автоматизация буровых агрегатов.-М./Недра, 1971, с. 8687, рис. 40. .Авторское свицетольство СССР по заявке № 25О6988/03, кл. Е21 1319/1О, 1977.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ ПОДВЕСНОЙ ТРУБНЫЙ КЛЮЧ | 2005 |
|
RU2289672C2 |
| ГИДРОПРИВОДНОЙ ПОДВЕСНОЙ ТРУБНЫЙ КЛЮЧ | 2003 |
|
RU2243351C1 |
| АВТОМАТИЧЕСКИ РЕГУЛИРУЕМАЯ ПРИВОДНАЯ ЧЕЛЮСТЬ ТРУБНОГО КЛЮЧА | 2009 |
|
RU2525241C2 |
| УНИВЕРСАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ ПОДВЕСНОЙ ТРУБНЫЙ КЛЮЧ | 2007 |
|
RU2348507C1 |
| МЕХАНИЧЕСКИЙ ТРУБНЫЙ КЛЮЧ | 1991 |
|
RU2042502C1 |
| Автоматический ключ с замкнутым зевом для труб и штанг | 1978 |
|
SU768930A1 |
| МЕХАНИЧЕСКИЙ КЛЮЧ | 2002 |
|
RU2223170C2 |
| ЭЛЕВАТОР ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1999 |
|
RU2175047C2 |
| Устройство для перемещения труб в штангоприемник буровой вышки | 1989 |
|
SU1740615A1 |
| УСТРОЙСТВО ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ НАСОСНЫХ ШТАНГ | 2001 |
|
RU2204010C2 |
б 3 5 6 повернуто
