: ,1 Изобретение относится к рабочим органам землеройных машин для блочной разработки грунта.
Известно устройство для блочной разработки грунта, имеющее режущий орган я захват для блоков грунта, выполненный в виде гибких лент 1.
Другим известным техническим решением является рабочее оборудование для блочной, разработки грунта, включающее режущий орган н захват для блоков грунта 2.
Однако такое оборудование .не обеспечивает подрезание блока от массива грунта снизу, а также ойо не обеспечивает BbieMiKy крупных блоков из-за возможного их разрушения в процессе выеМки.
Целью изобретения является повышент е эффективности разработки путем обеспече-ния выемки крупных блоков грунта.
Эта цель достигается тем, что захват рабочего оборудования выполнен в виде короба с -подвижным гибким днищем, передняя чаСть которого выполнена в виде гибкого режущего органа, установленного в стенках короба с возможностью его возвратно-nocTiyn а тельного движения в Ялосдости днища во взаимно перпендикулярных направлениях.
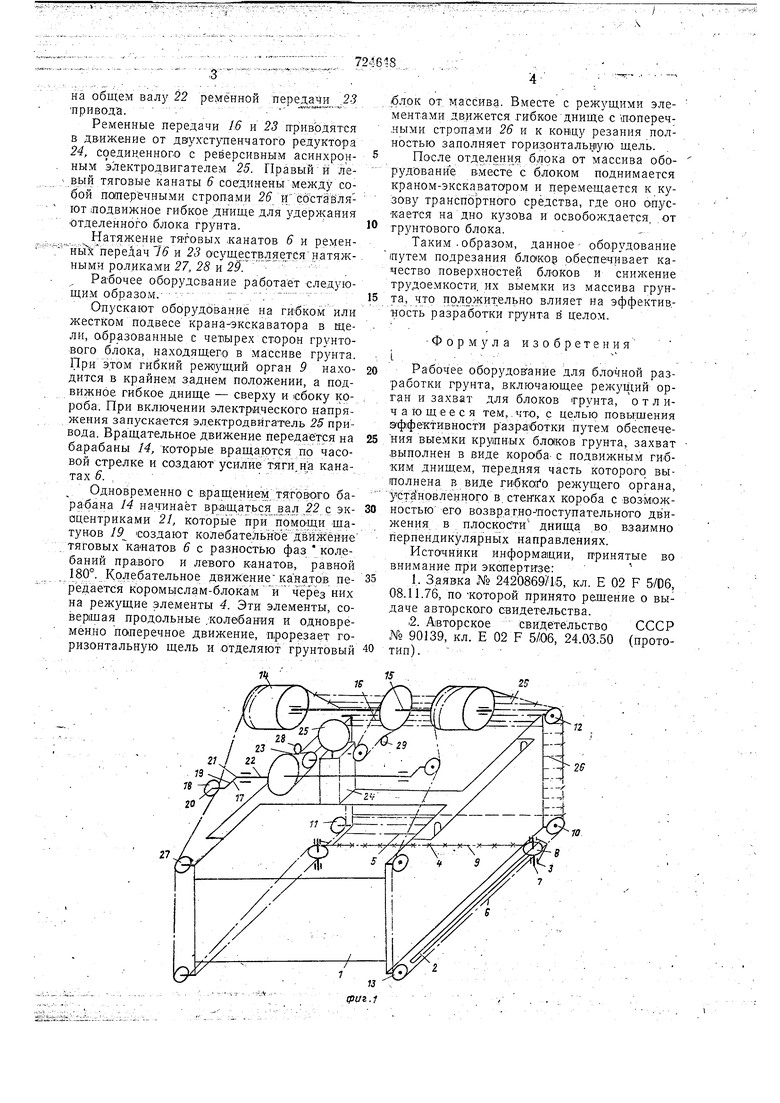
На фиг. 1 изображено рабочее оборудование, общий вид; ка фиг. 2 - днище рабочего оборудования с режущим органом; на фиг. 3 - сечение Л-Л на фиг. 2.
Рабочее оборудование включает захват в виде короба /, имеющего в нижней ч.астя две продольные направляющие 2 для движения горизонтальных роликов привода перемеш,ения режущих элементов образующих цереднюю часть подвижного гибкого днища 5. Привод перемещения днища содержит два тяговь1х каната 6, которые закреплены с одной стороны на осях роликов 3 правой и левой канатньтх передач, а с другой стороны - на коромыслах-блоках, шарнирно соединенных с 0€ями 7 роликов . К шатунам 8 шарнирно присоединяются правый и левый .концы гибкого режущег5 органа Р с режущими элементами 4. Тяговые канаты 6 подвещены на направляю. щих блоках 10, 1:1, 12 ц 13 и перемещаются при повороте барабанов 14, насаженных на общий вал 15 ременной передачи 16 привода режущего органа.
Для осуществления колебательного движения гибкого режущего органа 4 слулсат два механизма 17, состоящие из блоковроликов 18, шатунов 19, которые соединены при помощи пальцев 20 с эксцентриками 2/. Эксцентрики 2/ повернуты относительно друг друга на угол 180° и закреплена на общем вал} 22 ременной передачи 23 привода. Ременные передачи 16 и 23 приводятся в дВИжение от двухступенчатого редуктора 24, соединенного с реверсивным асинхронным электродвигателем 25. Правыйй левый тяговые канаты 6 соединены между собой поперечными стропами 26 и ебставляют лодвижное гибкое днище для удержания отделенного блока грунта. Натяжение тяговых :канатов 6 и ремен ньйсЪередач 75 и 23 осуществляетсянатяжными роликами 27, 28 и 2. Рабочее оборудование работает следующим образом.- ---- 7 . . Опускают оборудование на гибком или жестком подвесе крана экскаватора в щели, образованные с четырех сторон грунтового блока, находящего в массиве грунта. При этом гибкий режущий орган 9 находится в крайнем заднем положении, а подвижное гибкое днище - сверху и сбоку крроба. При включении электрического напряжения запускается электродвигатель 25 привода. Вращательное движение передается на барабаны М, которые врап1аются по часовой стрелке и создают усилие тяги, на канатах 6. . Одновременно с вращением тягового барабана 14 начинаёт вращаться вал 22 с экацентриками 21, которые при помощи щатунов 19 1создают колебательное движение тяговых канатов 6 с разностью фаз колебаний правого и левого канатов, равной 180°. Колебательное движение канатов перёдается коромыслам-блокам и черёз них на режущие элементы 4. Эти элементы, совершая продольные /колебания и одновременно поперечное движение, прорезает горизонтальную щель и отделяют грунтовый
г
JO блок от, массива. Вместе с режущими элементами движется гибкое днище с лопереч лыми стропами 26 и к концу резания полностью заполняет горизонтальную щель. После отделенная блока от массива оборудование в месте с блоком поднимается краном-экскаватором и перемещается к кузову транспортного средства, где оно опускается на дно кузова и освоболсдается, .от грунтового блока. Таким .образом, данное- оборудование (путем подрезания блоков обеспечивает качество поверхностей блоков и снижение трудоемкости, их выемки из массива грунта, что положительно влияет на эффектив.ность разработки грунта в целом. -Формула изобретения 1- .:. ... Рабочее оборудовгание для блочной разработки грунта, включающее реж)ш,ий орган и захват для блоков грунта, отличающееся тем,-ЧТО, с целью повышения ЭффежтиБНости разработки путем обеспечения выемки крупных бло1ков грунта, захват выполнен в виде короба- с подвижным гибким днищ,ем, передняя часть которого выполнена в виде гибкато режущего органа, Установленного в. стенках короба с возможностью его возвратно-поступательного движения. в плоскости днища во. взаимно перпендикулярных направлениях. Источники информащии, принятые во внимание при экапертизе: 1. Заявка № 2420869/1.5, кл. Е 02 F 5/06, 08.11.76, по которой принято решение о выдаче авторского свидетельства. i2. Авторское свидетельство СССР № 90139, кл. Е 02 F 5/06, 24.03.50 (прототип). 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ МЕСТОРОЖДЕНИЯ ЯНТАРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011828C1 |
| РАБОЧИЙ ОРГАН ЭКСКАВАТОРА-ДРАГЛАЙНА | 1992 |
|
RU2015255C1 |
| СПОСОБ РАЗРУШЕНИЯ МОНОЛИТНЫХ МАССИВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547526C2 |
| Рабочий орган экскаватора-драглайна | 2022 |
|
RU2798186C1 |
| Траншейный экскаватор | 1977 |
|
SU651089A1 |
| Землеройный рабочий орган | 2022 |
|
RU2795638C1 |
| Рабочее оборудование экскаватора-драглайна | 1983 |
|
SU1155682A1 |
| Рабочее оборудование экскаватора-драглайна | 1987 |
|
SU1707142A1 |
| РАБОЧИЙ ОРГАН ЭКСКАВАТОРА-ДРАГЛАЙНА | 1990 |
|
RU2009297C1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС С ДОБЫЧЕЙ ИСКОПАЕМОГО КРУПНЫМИ БЛОКАМИ И ДОСТАВКОЙ ЭСКАЛАТОРАМИ | 2008 |
|
RU2398107C2 |

