линии расстояниях от источника. Во-вторых, к ухудшению точности измерения приводит иоворот плоскости источника поля (из-за неровностей почвы, на которой расположена линия).
Цель изобретения - повышение точности управления движением горной самоходной машины за счет компенсации неравномерности поля вблизи концов двухпроводной линии.
Цель достигается за счет того, что двухпроводная линия выполнена расходящейся от середины к ее концам, причем расстояние от прямолинейного провода до другого провода двухпроводной линии определяeTcsJ по формуле
а(х) аа (l +
2-х
где X - расстояние от ближнего кЬнца линии до данной точки на расходяшейся части линии, м; GO - расстояние между приводами двухпроводной линии в ее середине, м.
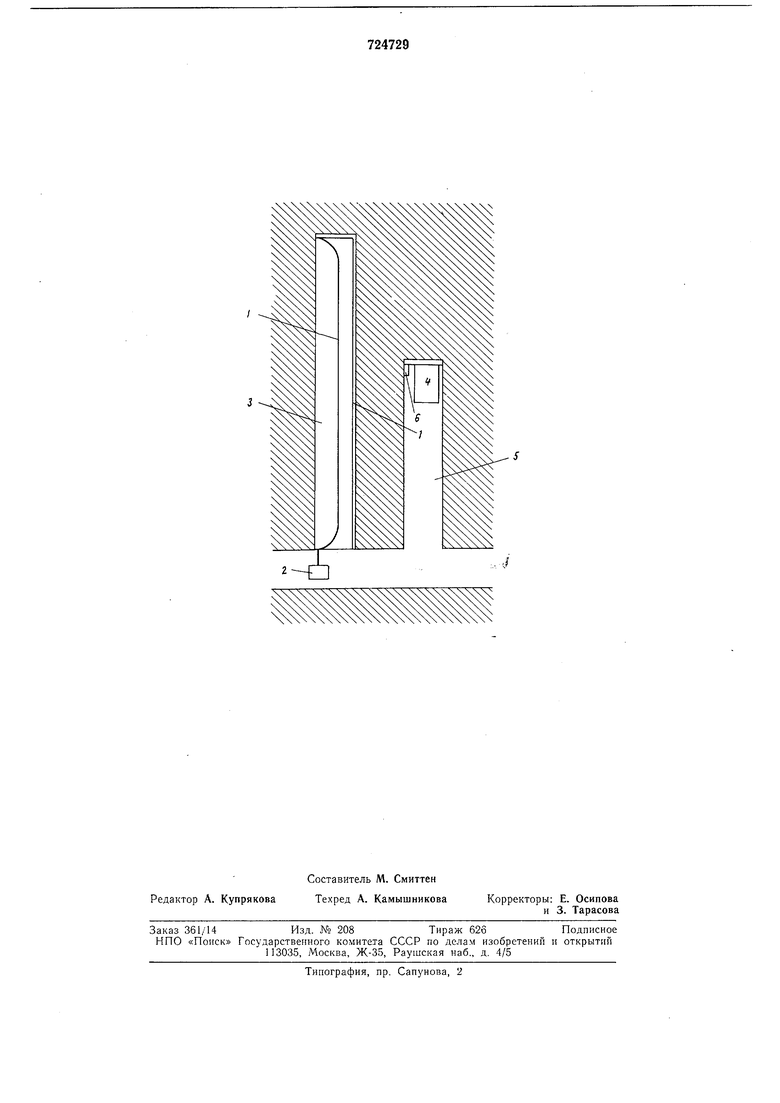
На чертеже .представлена схема предложенного устройства.
Источник 1 электромагнитного поля подключен к генератору 2 переменного напряжения и размешен в ранее пройденной выработке 3. Горная самоходная машина 4 проходит новую горную выработку 5 на заданном расстоянии от выработки 3. Заданное расстояние {или заданная толщина целика) обеспечиваетсй путем управления движением машины 4 при помощи установленного на ней измерительного блока 6.
Источник 1 электромагнитного поля выполнен в виде расходящейся к концам двухпроводной линии, причем ближпий к машине 4 провод прямолинеен.
Расстояние между проводами линии источника 1 определяется по приведенной формуле.
Электромагнитное поле, создаваемое источником 1, начиная с некоторого расстояния от концов линии, практически остается постоянным. Это расстояние в несколько раз меньше, чем для двухпроводной линии с параллельными проводниками.
Устройство работает следующим образом.
Электромагнитное поле источника 1 измеряется измерительным блоком б, установленным на горной машине 4. Ё блоке 6 измеренный сигнал сравнивается с заданным. Разность сигналов поступает на управление
исполнительными органами горной машины 4, которая воспроизводит вне краевой зоны форму ближайшего к ней проводника источника 1.
Изобретение позволяет повысить точность
автоматического управления направленным дви кением горной самоходной машины практически на всей длине проходимой выработки, вывести человека из зоны забоя. Повышение точности управления позволяет
уменьшить толщину межкамернЫх и межходовых цеЛиков ориентировочно на 25- 30%, что уменьшает нотери полезного ископаемого, остающегося в охранных целчках.
Формула изобретения
1.Устройство для автоматического уггравления движением горной самоходной машины, содержащее подключенный к генсратору переменного напряжения источник электромагнитного поля, выполненный в виде замкнутой двухпроводной линии, и измерительный блок, установленный на машине, отличающееся тем, что, с целью
повышения точности управления, двухпроводная линия вынолнена расходящейся от середины к ее концам.
2.Устройство по п. 1, отличающееся тем, что расстояние от прямолинейного провода до другого провода двухпроводной лннии определяется по формуле
/1 . 1
а И
2-
где ,г--расстояние от ближнего конца линии до данной точки на расходящейся части линии, м; «о - расстояние между проводами двухпроводной линии в ее середине, м. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 481762, кл. G 01В 7/02, 01.02.74.
2.Бражников И. А. и др. Индукционный метод контроля Щцрины угольных целиков.- «Горный журнал. Известия ВУЗов, Свердловск, 1971, № 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движением самоходной машины | 1983 |
|
SU1099072A1 |
| Устройство для автоматического управления движением самоходной горной машины | 1982 |
|
SU1086155A1 |
| Устройство контроля параллельности проходимых траекторий | 1984 |
|
SU1190031A1 |
| Устройство для измерения ширины угольного целика | 1974 |
|
SU481762A1 |
| Коммуникационная система для подземных сооружений | 2017 |
|
RU2672273C1 |
| НИЗКОЧАСТОТНАЯ АНТЕННА | 2004 |
|
RU2262166C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОМАГНИТНОГО ИМПУЛЬСА | 1991 |
|
RU2013781C1 |
| СПОСОБ РАЗРАБОТКИ МАЛОМОЩНОГО ПОЛОГОГО РУДНОГО ТЕЛА | 2010 |
|
RU2456452C2 |
| СПОСОБ И СИСТЕМА МОБИЛЬНОЙ СВЯЗИ ДЛЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2017 |
|
RU2642845C1 |
| СПОСОБ НАВИГАЦИИ И ИЗМЕРЕНИЯ РАССТОЯНИЙ В ПРОТЯЖЕННЫХ ОБЪЕКТАХ | 2022 |
|
RU2797240C1 |