) X)
О
--1
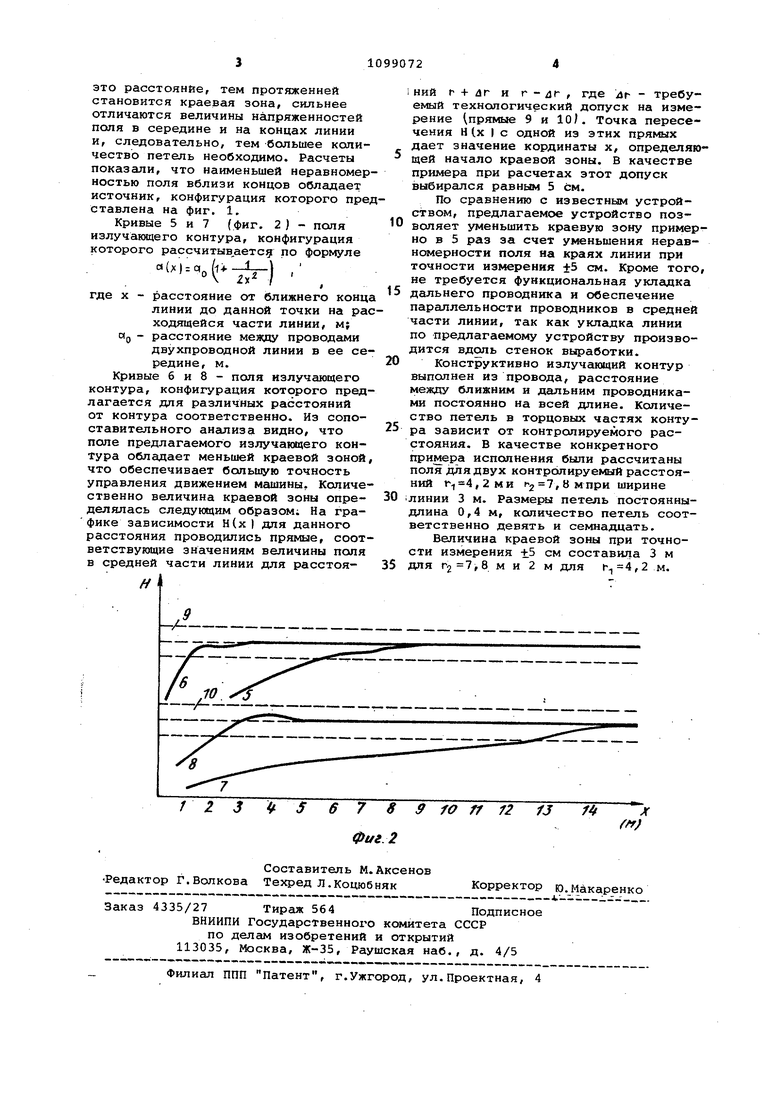
ND Изобретение относится к приборостроению и может быть применено для автоматического управления горными комбайнами. Известно устройство автоматическ го управления движением горной маши ны, содержащее подключенный к генератору цеременного тока источник электромагнитного,поля, выполненный в виде замкнутой двухпроводной линии, и измерительный блок, установленный на машине tl3Недостатком этого устройства явл ется низкая точность вождения на краях трассы, обусловленная тем, что применение этого устройства пре полагает однозначное соответствие между величиной поля и расстоянием ближайшего к машине проводника исто ника поля. Такое предположение правомерно для бесконечной линии. Огра ниченность реального источника поля приводит к тому, что поле на прямой параллельной ближнему проводнику, при приближении к концу источника уменьшается, что нарушает точность управления движением горной машины. Качественно этот фактор характеризуется краевой зоной, в которой точ ность расстояния отличается от зада Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство автоматического управления движение самоходной машины, содержащее подкл ченнный к генератору переменного ;тока располагаемый в базовой вырабо ке излучающий,контур, выполненныйв виде замкнутой двухпроводной лини расходящейся от середины к ее кондам, и измерительный блок, расположенный на машине, движущейся вне контура охватываемого источника поля 2 . Недостатком известного устройств является низкая точность управления на краях трассы, обусловленная нали чием краевой зоны, зависящей от контролируемого расстояния, а также то, что использование устройства предполагает функциональную укладку дальнего от машины проводника, что я эляется затруднительным, а в ряде случаев и невозможным. Сближение проводников в средней части усиливает влияние дальнего проводника, что налагает дополнительные требования на укладку источника поля в плоскости, так как из-за неровностей почвы на -которой он расположен может произойти поворот плоскости источника. Цель изобретения - повышение точности управления движением машины путем уменьшения неравномерности поля вблизи концов линии, Поставленная цель достигается тем, что в устройстве автоматического управления движением самоходной машины, содержащем подключенный к генератору переменного тока излучающий контур, выполненный в виде замкнутой двухпроводной линии, и измерительный блок, установленный на машине, торцовые части двухпроводной линии выполнены в виде петель. На фиг. 1 показана форма излучающего контура, обеспечивающая прямолинейное движение машины с максимальной точностью и расположение устройства; на фиг. 2 - распределение величины поля вдоль излучающего контура, на фиксированных расстояниях от него, рассчитанных на ЭЦВМ. Устройство содержит излучающий контур 1, генератор 2, измерительное устройство 3 и самоходную машину 4. Устройство работает следующим образом. При движении машины, например, от середины излучающего контура 1 на заданном эквидистантном расстоянии, измерительное устройство 3 сравнивает величину напряженности, ориентирукацего электромагнитного поля, создаваемого излучающим контуром 1, с заданной и вьщает команды управления на исполнительные органы. Таким образом, траектория движения машины 4 совпадает с эквипотенциальными линиями ориентирующего поля. Как известно, устройство автоматического управления движением самоходной машины 4 должно обеспечить движение машины по линиям, эквидистантным базовой выработке, поэтому для правильной работы устройства эквипотенциальные линии ориентирующего поля должны совпадать с эквидистантными относительно базовой выработки. Такое совпадение имеет место в средней .часяи трассы движения самоходной машины 4, При ее дальнейшем движении к концу источника эквипотенциальные линии не совпадсцот с эквидистантными, вследствие органиченности размеров источника. Однако путем изменения формы источника поля удается практически по всей длине сохранить совпадение эквидистантных и эквипотенциальных линий и тем самым обеспечить постоянную точность управления. Достигается это специальной укладкой источника, создающего ориентирующее поле. Ориентирующий проводник прокладывается в базовой выработке по ее периметру, а для компенсации спада напряженности ориентирующего поля на концах линии вводятся дополнительные петли. Эти петли выполняются одинаковыми, а их количество определяется величиной контролируемого расстояния, причем, чем больше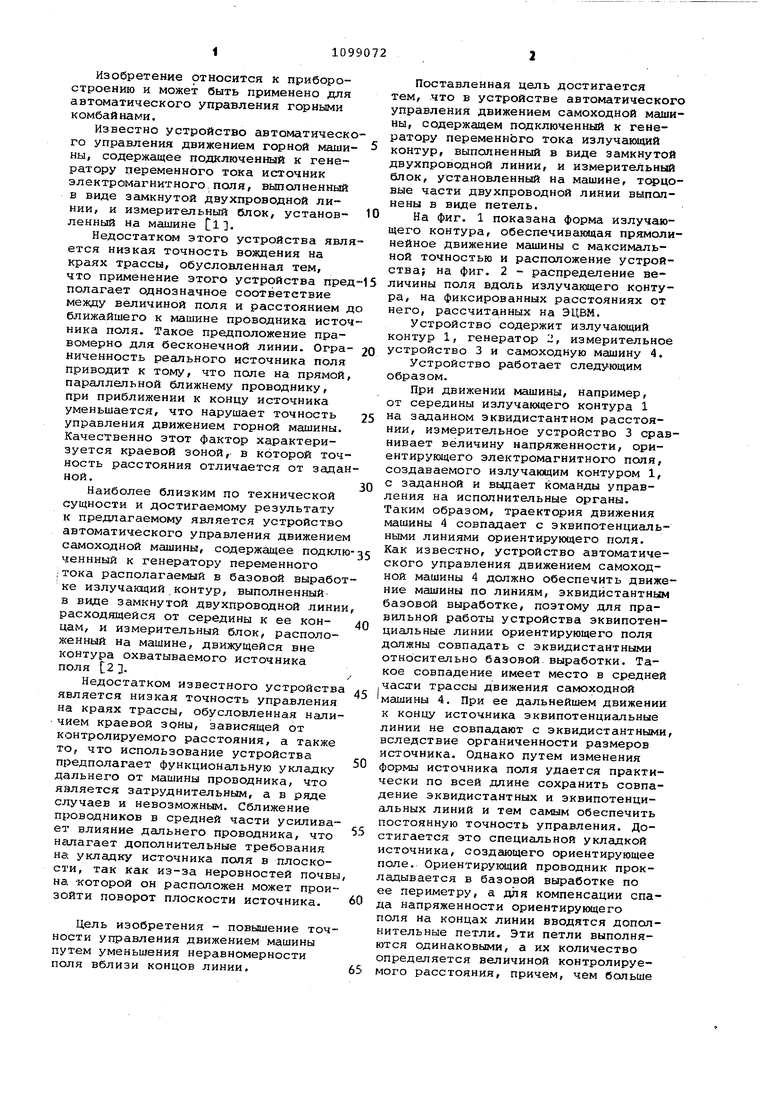
УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ САМОХОДНОЙ МАШИНЫ, содержащее подключенный к генератору переменного тока излучающий контур, выполненный в виде замкнутой двухпроводной линии, и измерительный блок, установленный на самоходной маиТине, отличающееся тем, что, с целью повьшения точности упр вления путем уменьшения неравномерности поля вблизи концов двухпроводной линии, торцовые части двухпроводной линии выполнены в виде петель.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бражников И.А., Хван М | |||
| А | |||
| и Ткачев В.В | |||
| Индукционный метод контроля ширины угольных целиков.Горный журнал | |||
| Известия ВУзЬв, 1971, №9 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления движением горной самоходной машины | 1978 |
|
SU724729A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
