IT
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Устройство управления движением самоходной машины | 1983 |
|
SU1099072A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода | 1982 |
|
SU1064884A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2427000C1 |
| Устройство для контроля электрических машин | 1974 |
|
SU535586A1 |
| Способ ориентации самоходной машины в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1087965A1 |
| Устройство для сигнализации о положении подвижного объекта | 1984 |
|
SU1191929A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
УСТРОЙСТВО КОНТРОЛЯ ПАРАЛЛЕЛЬНОСТИ ПРОХОДИМЫХ ТРАЕКТОРИЙ, содержащее генератор переменного тока, подключенный к ориентирующей линии, индукционный датчик, подключенный к усилителю, и задатчик опорного напряжения, соединенный с первым входом блока сравнения, отличающееся тем, что, с целью повышения точности контроля отклонения машины от заданной траектории за счет компенсации погрешности измерения, устройство снабжено сумматором, цифроаналоговым преобразователем, коммутатором, блоком исходных данных, блоком запоминающих элементов и датчиком пути, выход которого соединен с п-входами блока запоминающих устройств, п-выходов которого подключены к п входам коммутатора, выход коммутатора связан через цифроаналоговый преобразователь с первым входом сумматора, выход которого подключен к второму входу блока $S сравнения, причем выход усилителя соединен с вторым входом сумматора, а выход блока исходных данных подключен к n-fl входу коммутатора.
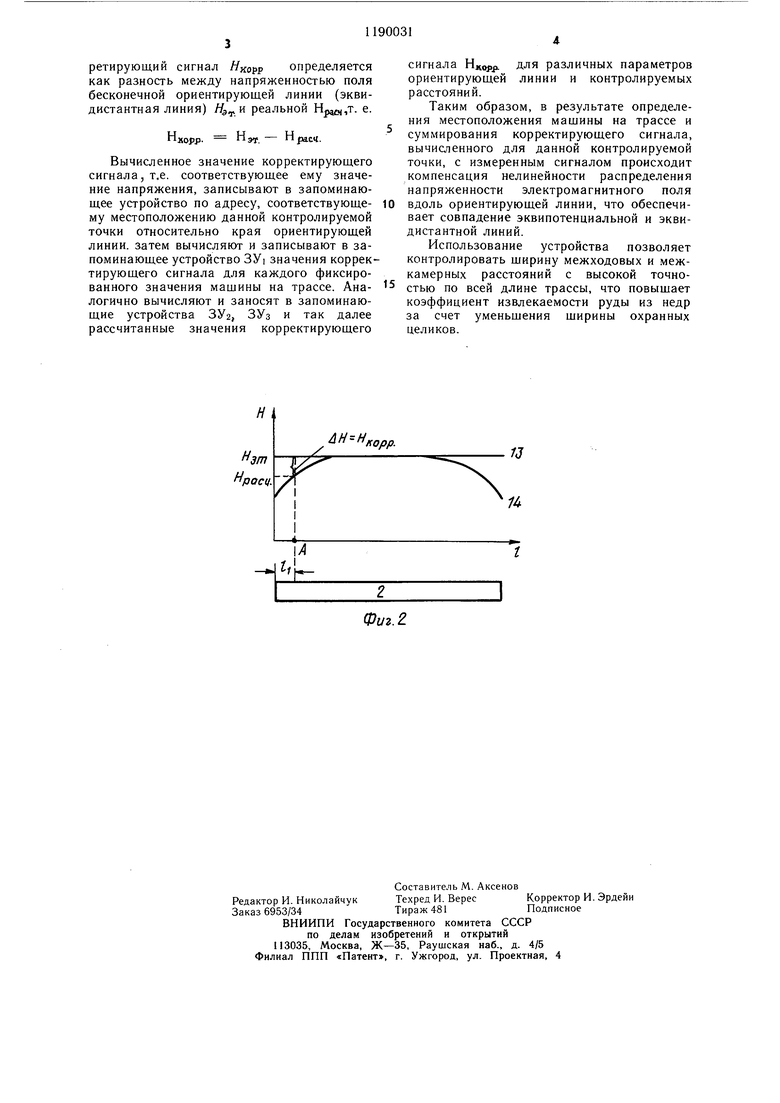
Vuz.f Изобретение относится к горнодобывающей промышленности и может найти применение для создания систем автоматического контроля и управления положением горной машины относительно базовой выработки, а также может использоваться при создании систем автоматического вождения мобильных транспортных средств. Целью изобретения является повышение точности контроля отклонения машины от заданной траектории за счет компенсации погрешности измерения. На фиг. 1 представлена структурная схема устройства; на фиг. 2 - график, поясняющий процесс формирования корректирующего сигнала. Устройство содержит установленные в базовой выработке генератор 1 и ориентирующую линию 2, а также установленные на мащине индукционный датчик 3, усилитель 4, блок 5 исходных данных, датчик 6 пути, сумматор 7, цифроаналоговый преобразователь 8, коммутатор 9, блок 10 запоминающих элементов, блок 11 сравнения и задатчик 12 опорного напряжения. Устройство работает следующим образом. Индукционный датчик 3 формирует сигнал, соответствующий напряженности электромагнитного поля, создаваемого ориентирующей линией 2 с током, вырабатываемым генератором 1. Этот сигнал усиливается усилителем 4 и подается на первый вход сумматора 7, на второй вход которого подается корректирующий сигнал Нкорр. с выхода цифроаналогового преобразователя 8. Корректирующий сигнал формируется следующим образом. Датчик 6 ПУТИ вырабатывает сигнал, соответствующий местоположению машины на трассе. Этот сигнал поступает в блок 10 запоминающих элементов, на выходе которого появляются корректирующие сигналы, соответствующие заданному местоположению мащины на трассе для различных исходных данных (толщины контролируемого целика, длины ориентирующей линии, расстояния между ориентирующими проводниками и т.д.). Заданные параметры прохождения выработки (толщина контролируемого целика, длина трассы и т.д.) устанавливаются заранее в блоке 5 исходных данных, который в соответствии с установленными значениями через коммутатор 9 подключает соответствующее запоминающее устройство из блока 10 запоминающих элементов, например ЗУ|, к входу цифроаналогового преобразователя 8, который преобразует корректирующий цифровой сигнал запоминающих устройств в аналоговый корректирующий сигнал, поступающий на второй вход сумматора 7. С выхода последнего скорректированный сигнал поступает в блок 11 сравнения, к второму входу которого подключен задатчик 12 опорного напряжения, формирующий сигнал, соответствующий данной эквидистантной линии. На выходе блока 11 сравнения получается сигнал, соответствующий отклонению мащины от заданного направления движения, амплитуда которого характеризует величину отклонения, а знак - направление. В запоминающем блоке 10 хранятся значения корректирующего сигнала для каждой фиксированной точки положения мащины на трассе относительно края ориентирующей линии. Корректирующий сигнал предваритель но вычисляется для каждого фиксированного значения положения машины на трассе и заносится затем в запоминающее устройство. На фиг. 2 приведен график, поясняющий процесс формирования корректирующего сигнала, где обозначены эквидистантная линия 13 и распределение 14 эквипотенциальной линии поля вдоль ориентирующей линии 2. Для контролируемой точки А определяют расчетное значение напряженности электромагнитного поля Нрас«. для данных геометрических размеров ориентирующей линии и заданного тока J в линии. Вычисления производят по известной формуле напряженности поля одиночного проводника с током: (cosa - cosp), где R - расстояние до проводника; аир - углы, образованные радиус-векторами, проведенными в контролируемую точку из начала и конца проводника. Выразим углы через координаты контролируемой точки А: a arctg- ; p arctg-Д-, Cti где El - расстояние от края ориентирующей линии до точки А; -длина ориентирующей линии, следовательно 4|Rf °s(3ctgj) - cos(arctg- -). Таким образом, при заданных значениях тока Л в линии и требуемого контролируемого расстояния R можно определить значение напряженности поля для каждого заданного значения Ei местоположения мащины на трассе. В случае двухпроводной замкнутой линии вычисляют значения напряженности поля для каждого из участков, а результирующее значение напряженностей поля получают как сумму напряженностей поля каждого из участков. Корретирующий сигнал //хорр определяется как разность между напряженностью поля бесконечной ориентирующей линии (эквидистантная линия) /4у. и реальной Нр5и,т. е.
Н
Н
расч.
эт.
Вычисленное значение корректирующего сигнала, т.е. соответствующее ему значение напряжения, записывают в запоминающее устройство по адресу, соответствующему местоположению данной контролируемой точки относительно края ориентирующей линии, затем вычисляют и записывают в запоминающее устройство ЗУ значения корректирующего сигнала для каждого фиксированного значения машины на трассе. Аналогично вычисляют и заносят в запоминающие устройства ЗУ2, ЗУз и так далее рассчитанные значения корректирующего
,
Н.
эт
//,
расц.
сигнала Нкодр. для различных параметров ориентирующей линии и контролируемых расстояний.
Таким образом, в результате определения местоположения машины на трассе и суммирования корректирующего сигнала, вычисленного для данной контролируемой точки, с измеренным сигналом происходит компенсация нелинейности распределения напряженности электромагнитного поля вдоль ориентирующей линии, что обеспечивает совпадение эквипотенциальной и эквидистантной линий.
Использование устройства позволяет контролировать ширину межходовых и межкамерных расстояний с высокой точностью по всей длине трассы, что повышает коэффициент извлекаемости руды из недр за счет уменьшения ширины охранных целиков.
корр.
Фиг.г
| Бражников И | |||
| А., Хван М | |||
| А., Ткачев В | |||
| В | |||
| Индукционный метод контроля ширины угольных целиков.- Изв | |||
| вузов | |||
| Горный журнал, 1971, с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Устройство для измерения ширины угольного целика | 1974 |
|
SU481762A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического управления движением горной самоходной машины | 1978 |
|
SU724729A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
