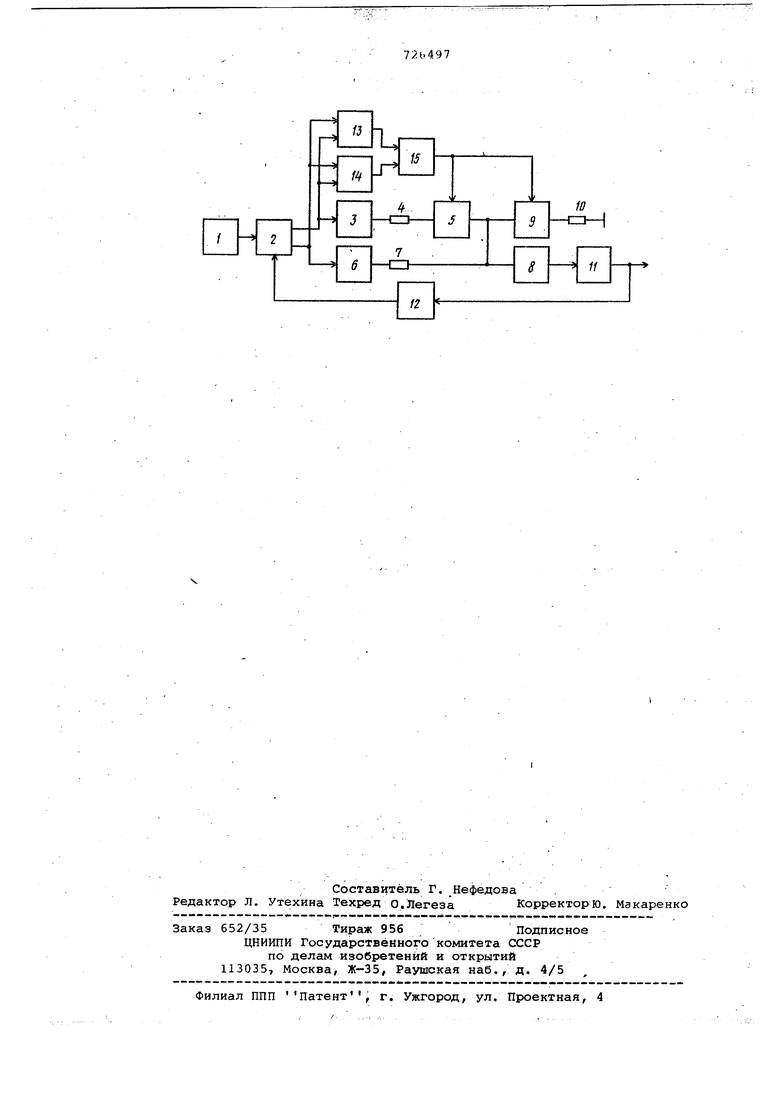
Изобретение относится к автомати ке и .вычислительной технике и может быть использовано при проектировани систем автоматического управления электроприводами. Известен следящий привод, содержащий кодовое устройство ввода, сум матор, преобразователь код-напряжение и электропривод 1. Известна также цифровая следящая система содержащая преобразователь вал-код, вычислительное устройство, преобразователь код-напряжение, электропривод, устройство управления и исполнительный механизм 2. Недостатком данных устройств является низкаяточность обработки заданной величины и малый диапазон регулирования скорости. Из известных цифровых следящих систем наиболее близкой по технической сущности к изобретению является система, содержащая вычислитель, пер вый вход которого подключен к выходу устройства управления, второй вход через последовательно соединенные преобразователь положение-код и исполнительный механизм - -к выходу при вода, а первый и второй выходы - ко входам первого и второго преобразователей код-напряжение соответственно 3 . Точность работы такой системы недостаточна. Цель изобретения - повышение точности работы системы. Эта цель достигается тем, что в предложенную следящую систему введены масштабирующие элементы, ключи. Дешифраторы и пороговый элемент, первый и второй входы которого соответственно через первый и второй дешифраторы подключены к первому, и второму выходам вычислителя, а выход - к первым входам ключей, выход первого преобразователя код-напряжение через первый Масштабирукядий элемент соединен со вторым входом первого ключа, выход второго преобразователя коднапряжение через первый масштабирующий элемент соединен со входом привода и выходами первого и второго ключей, ,а:второй вход которого ключа подключен через третий масштабирующий . элемент к шине нулевого потенциала. На чертеже представлена функциональная схема цифровой следящей системы. Система содержит устройство управ ления 1, вычислитель 2, первый преобразователь код-напряжение ,(ПКН)3, первый масштабирующий элемент 4, первый ключ 5, второй ПКН 6, второй масштабируквдий элемент 7, привод 8, второй ключ 9, третий масштабирующий элемент 10, исполнительный .механизм Д1, преобразователь положение - код (ППК) 12, первый 13 и второй 14 дешифраторы, и пороговый элемент 15. Масштабирующие элементы 4, 7 .И 10 могут .быть выполнены, например, на резисторах. .... Цифровая следящая система работа,ет следукндим о.бразом. Устройство управления 1 выдает кодовое задание на вычислитель 2, в котором .происходит сравнение .с кодовым сигналом обрат,ной связипо положёнию с выхода ППК .12 Разность ;к9Дов на выходе льгаислителя 2, пропорцйональная. рассогласованию, раз.бйваётся на две группы, и на вход ПКН Э подается старшая группа разря дов кода рассогласования, а на вход ПКЕ 6 - младшая труппа разрядов кода рассогласования. Линейное преобразо вайиё кьдав в напряжение происходит .в ПКН 3 и б, й& кбтбрах с помощью элементов 4и 7 получают результирую щийтоковый сигнал на входе регулиру мого по скорости привода 8. Входной ток, пропорциональный величине рассо ласования, заставляет привод 8 отрабатывать. :нходное воздействие и через исполнительный механизм11 вызывает изменение кода на выходе ППК 12. Как только код положения на выходе ППК 1 -станет равен коду задания от устройства управления 1, величина кодарас сбгЗтасОвания на выхбде вычислителя 2станет равна нулю,и привод 8 прекратитперемещение. Выполнение преоб ра зователя кОда рассогласования с .разделительнымпреобразованием .стар шей г руйпа эазрядов .кода рассогласо/ванйя и младшей . группы разрядов кодассуммированием токов, в соответ ствующем масштабе на вхОдё р ёгулйруе мого привода 8, позволяет значительно снизить диапазон каждого ПКН 3 и а следовательно, уменьшить , влияние дрейфа и смещения нуля Выходных усил телей ПКН 3 и б на точность работы системы в целом. При изменении кода рассогласования с величин старшей группы разрядов на младшую первый ключ 5 отключает от входа привода 8 выход ПКН 3, под1{люченного через элемент 4. Масштаб тока первого ПКН 3больше, чем масштаб второго ПКН б, заданный вторьгм элементом 7, следовательно, влияние дрейфа и смещения нуля ПКН 3 больше. При отключении ключа 5 через ключ 9 подключается элемент Ю, равньлй элементу 4, ко ВХОДУ привода 8, чтЪобеспёчйва т ло.стоЯйство режима на входе привода 8. В результате сохраняется линей . ность, а следовательно, точность отаботки задания. Для исключения возущений, вы зываемых многократным срабатыванием ключей 5 и 9 при колеаниях рассогласования около уставки отключения ПКН 3 введен пороговый элемент 15, обеспечивающий подключение ПКН 3 при коде рассогласования, большем, чем код отключения. Рассог;1асование в кодовой форме с. выхода вычислителя 2 подается на дешифраторы 13 и 14, подключенные к пороговому элементу 15, который управляет ключами 5 и 9. Использование изобретения позволяет исключить влияние дрейфа и смещение нуля преобразователя код-напряжение, что позволяет получить высокую динамическую и статическую точности работы сист.емы в большом диапазоне регулирования скорости электропривода. Формула изобретения Цифровая следящая система, содержащая вычислитель первый вход которого подключен к выходу устройства управления, второй вход через последовательно соединенные преобразователь положения - код и исполнительный меха;низм - к.вькоду привода, а первый и второй выходы - ко входам первого и второго преобразователей коднапряжение соответственно, о т л и ч а ю щ а я с я тем, что, с целью повышения точности работы системы, она содержит масштабирующие элементы, ключи, дешифраторы и пороговый элемент , первый и второй входы которого соответственно через первый и второй дешифраторы подключены к первому и второму выходам вычислителя, а выходк первым входам ключей, выход первого йреобразователя код-напряжение через первый масштабирующий элемент соединен со вторым входом первого ключа, выход второго преобразователя код-напря жение через второй масшта- бирующий элемент соединен со входом привода и выходами первого и второго ключей, а второй вход второго ключа подключен через третий масштабирукнций элемент к шине нулевого потенциала. .; Источники информации, принятые во внимание при экспертизе I. Бай Р. Д. и др. Управление.следящими электроприводами с применением цифровых устройств. М., Энергия., 1969, выпуск 330-, с. 23-28. t 2. Авторское свидетельство СССР 339905, кл. G 05 В 15/02, 1971. 3. Авторское свидетельство СССР № 428358, кл. G 05 15/02,1972 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в угол поворота вала | 1983 |
|
SU1117676A2 |
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| МКОГОКАНАЛЬМЫЙ ДЕКОДИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ «ЦИФРОВОЙ код - УГОЛ ПОВОРОТА ВАЛА» | 1967 |
|
SU199505A1 |
| Устройство синхронизации фаз сигналов двух генераторов | 1978 |
|
SU771886A1 |
| Измеритель дрейфа цифровых вольтметров | 1982 |
|
SU1022307A2 |
| Цифровая следящая система | 1977 |
|
SU734613A1 |
| Цифровая следящая система | 1978 |
|
SU769486A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |