vj
о: со
4
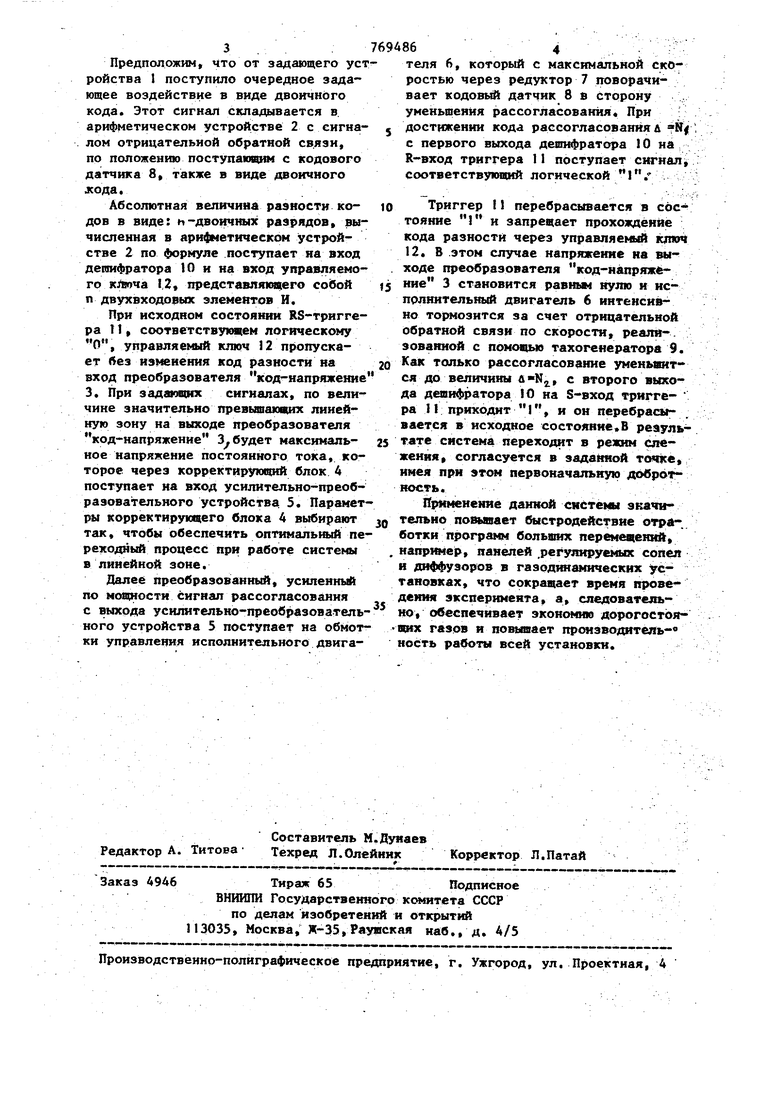
00 О) Предлагаемое изобретение относится к цифровым следящим системам и может быть использовано в различных автоматических системах управления, напримерt положением панелей регулирухярпс сопел и диффузоров. Известна следящая система П1, содержащая задающее устройство, выход которого соединен с первым входом арифметического устройства, выход которого соединен с первым входом цифрового блока сравнения, выход которого соединен с управляющим входом коммутатора, задаюасий регистр, выход которого соединен с вторым входом ци ового блока дра&нения, с управляющим входом щ«фрового управляемого регистра, с вторым входом кмшуталора, преобразователь код-напряжение к последовательно соедагаеиные цифровой управ ляемый резистор, усилительно-преобразовательиое устройство, исполнителышй двигатель, кодовый датчик. Однако в этой системе требуемый переходной процесс фop вIpyeтcя с помощью корректирующих устройств. Это не обеспечивает достаточного быстродействия системы в режиме согласования. Наиболее близким к изобретению техническим ревеняем является 1Д1фро вая следящая система (21,. содержащая арифметическое устройство, перBfe вход которого подключен к выход задающего устр кйства и последовательно соединенные преобразователь код-напряженю, корректирующий блок усвпитепьно-преобразовательиое устройство исполнительный двигатель, механически связанный с кодовым дат чиком, которого соединен с вт рьм входом арифметического устройства и, установленный на валу испол нйтельного Jaдаигaтeля, тахогенератор, выход которого соединен с вторым входом усилительно-преобразовательного устройства. Увеличение быстродействия и динайической точности в данной систем при отработке ступенчатых сигналов, суще твенно превышающих по величине линейную зону, происходит за счет отклонения тахогенератора. Это недо пустиж при наличии в системе возму щающих воздействий. Причем сигнал на выходе преобразователя код-напря жение в режиме согласования изменя ется пропорционально ошибке рассогласования и определяется передаточной функцией следящего контура. Это ограничивает максимальное использование динамических возможностей Привода в режиме торможения, что приводит к увеличению длительности всего переходящего процесса системы. Целью изобретения является повышение быстродействия системы. Указанная цель достигается тем, что в нее введены управляемый ключ, дешифратор и SS-триггер, выход которого подключв к управляющему выходу ключа, R-вход - к первому выходу дешифратора, а S-вход - к второму выходу де1 1ифратора, вход которого соединяется с выходом арифметического устройства и входом управляемого ключа, выход которого подключен к выходу преобразователя код-напряжения. Блок-схема цифровой следящей системы изображена на чертеже. Система состоит на. задающего устройства Т, арифметического устройства 2, преобразователя код-напряжение 3., корректирующего блока 4, усилительно-преобраз овательяого устройства 5, исполнительного двигателя 6, редуктора 7, кодового датчика 8, тахогенератора 9, дешифратора 10, RS-TpHrFepa Пи управляемого ключа 12. Сущность работы предложенной системы заключается s реализации следующего закона регу;г{ирования. при 4 N,,и состоянии RSтриггера - О О, при и состоянии RS- I триггера , при и состоянии RSтриггера - О , .., Я« Ча.максимальное напряжение постоянного тока на выходе преобразователя код-напряжение ;п - число разрядов преобразователя код-напряжение, а - код рассогласования; N - максимальное двоичное чис ло линейной зоны регулирования;NJ - минимальное двоичное число линейной зоны регулирования.
Предположим, что от задающего устройства I поступило очередное задающее воздействие в виде двоичного кода. Этот сигнал складывается в. арифметическом устройстве 2 с сигналом отрицательной обратной связи, по положению поступающт с кодового датчика 8, также в виде двоичного лсода.
Абсолютная величина разности кодов в виде: и-двоичных разрядов, вычисленная в арифметическом устройстве 2 по формуле поступает на вход дешифратора 10 и на вход управляемого rZf представлятяего собой п двухвходовых элементов И.
При исходном состоянии RS-триггера Т1, соответствукя(ем логическому О, управляемый ключ 12 пропускает без из «нения код разности на вход преобразователя код-напряжение 3. При задающих сигналах, по величине значительно превьшаюоких линейную зону на выходе преобразователя код-напряжение Забудет максимальное напряжение постоянного тока, которое через корректируювщй блок 4 поступает на вход усилительно-преобразовательного устройству 5. Параметры корректирующего блока 4 выбирают так, чтобы обеспечить оптималыа й переходный процесс при работе системы в линейной зоне.
Далее преобразованный, усиленный по мощности сигнал рассогласования с выхода усилительно-преобразовательного устройства 5 поступает на обмотки управления исполнительного двигателя 6, который с максимальной скоростью через редуктор 7 поворачивает кодовый датчик 8 в сторону . уменьщения рассогласования При достижении кода рассогласования д fNf с первого выхода дешифратора 10 на. R-вход триггера П поступает сигнал соответствующий логической I. .
Триггер I перебрасывается в состояние 1 и запрещает прохождение кода разности через управляемый клю 12. В .этом случае напряженке на выходе преобразователя код-напряжение 3 становится равным нулю и исполнительный двигатель б интенсивно тормозится за счет отрицательной обратной связи по скорости реализованной с помощью тахогенератора 9. Как только рассогласование уменывит- ся до величины а К2, с второго выхода дешифратора IО на S-вход триггера 11: приходит 1, и он перебрасывается в исходное состояние В результате система переходит в режим сяежеиия согласуется в заданной точке, имея при этом первоначальную доброГность.
Й жненение данной CKcretAi значи тельио повьввает быстродействие отриботки nporpai«i больших перемещений, Hanptmep, панелей .рег5гяируемых сопел и диффузоров в газодтшамических установках, что сокращает время прове дения эксперимента, а, следовательно, обеспечивает экономию дорогостоящих газов и повышает производитель- ноСть работы всей установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1979 |
|
SU890359A2 |
| Устройство управления позиционнымпРиВОдОМ | 1979 |
|
SU847278A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Цифровая следящая система | 1972 |
|
SU438984A1 |
| Многоканальный преобразователь код-угол | 1973 |
|
SU486344A1 |
| Многоканальный преобразователь код-угол | 1975 |
|
SU526935A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Следящий привод | 1986 |
|
SU1399697A1 |
| Цифровое устройство для коммутации симистора | 1982 |
|
SU1039005A1 |
ЦИФРОВАЯ СЛЕДЯРУ СИСТЕМА, содержащая арифметическое устройство, первый вход которого подключен к выходу задающего устройства и последовательно соединенные преобразователь код-напряжение, корректирующий блок, усилительно-преобразовательное устройство, исполнительный двигатель. механически связанный с кодовым датчиком, выход которого соединен с вторым входом арифметического устройства, и установленный на валу исполнительного двигателя тахогенератор, выход которого соединен с вторым входом усилительно-преобразовательного устройства, отличающаяся тем, что, с целью повышения быстродействия, в нее введены ключ, дешифратор и RS-триггер, выход которого подключен к управляющему входу ключа, R-вход - к первому выходу дешифратора, а S-вход - к второму выходу дешифратора, вход с в которого соединен с выходом арифметического устройства и информационсл ным входом ключа, выход которого подключен к входу преобразователя код-напряжение.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая следящая система | 1972 |
|
SU438984A1 |
