Изобретение относится.к области автоматики и вычислительной техники и может быть использовано в специализированных -вычислительных средствах информационно-измирительных систем и в радиоэлектронных устройствах.
В настоящее время при решении ряда задач управления и измерения возникает необходимость в переносе начала координат. Эта операция, например, применяется в тех случаях, когда необходимо учесть расстояние от прибора, измеряю щего местоположение объекта, до исполнительного устройства, в точку стояния которого перенесено начало новых координатных осей. Задача опреДелени координат объекта относительно исполнител%ного устройства по известным координатам объекта относительно измерительного устройства сводится к решению косоугольного треугольника ABC, где А - точка стояния прибора, измеряющего координаты объекта; В - точка стояния иопплнительного устройства; С - точка, в
которой находится объект в данный момент времени.
С точкой стояния А измерительного прибора связана некоторая неподвижная система координат ог) , начало которой совпадает с точкой А, Местоположение объекта С на плоскости относительно точки стояния А измерительного прибора определяется координатами: дальностью D (отрезок АС) и углом между осью Ог)
o и отрезком АС.
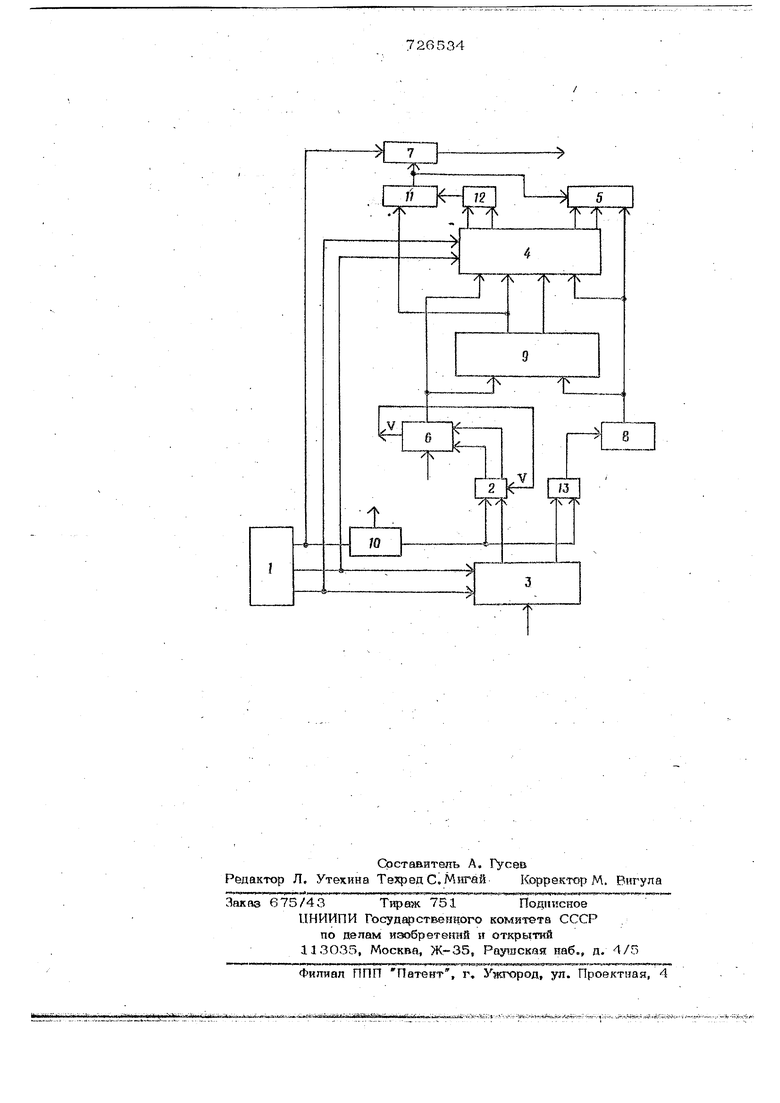
При этом известны расстояние R между точками стояния измерительного прибора н исполнительного устройства (отj резок АВ) и угол А между осью ог) и отрезком АВ. При этом косоугольный трекугольник ABC задан следующими элементами: двумя известными сторонами АВ н АС соответственно равными R и D, и углом между ними, равным о( -Х. Задача сводится к.определению стороны ВС и угпй между сторонами АВ и ВС. С этой целью производят перенос координат из точки А в точку В, сохраняя неизменным направление oceftdfe, иОп , попуча рт вспомогательную систему координат ) . Решение косоугольного треугольника ABC сводится к преобразованию его в прямоугольный треугольник ABC, катеты которого находят по извест ной гипотенузе {дальностьU ) и углу, меж ду сторонами АВ и АС, равному :С (г-Д):. -coscA. BC D-5mdt- , Тогда в прямоугольном треугольнике ВВ С имеет место Bt D-sino - , (2) . BB D-cosc t-R, откуда гипотенуза ВС в прямоутдль) треугольнике ВВС раЬна, BCpVBtSBB V()л- (DcoetX-R) . . (а) аугол между сторонами ВС и ВВ 8...arctgr 5f, (4) ИСКОМЫЙ угол при этом равен: M80°-e.arctg ||, (5); Для получения неизвестных йлементов косоугольного треугольника необходимо произвести преобразование координа в два этапа: - разложение дистанции D как поляр Hofxs йёктора, на Д1вв ортогональные составляющие в соответствии с формулами (); . .;. .: ..;;...-...,;. .. - по полученным пр змоугольным составляющим определить величину и положение стгороны ВС, т, е. произвести обратное преобразование из прямоугольных координат в полярнйе с помощью формул (3) и (4)..; Известно устройство ll, содержащее сумматоры, счетчики, схему сравнения, блок управления, элемент И, ИЛИ и блок сдвига. Недостатками известного устройства является большие затраты оборудования и недостаточное быстродействие. - Наиболее.близким по текнической сущ ности к изобретению является устройство 2 , содержащее блоки умножения, соеШгаенные с сумматорами, соединенными со сдвигающими регистрами, элементы И, соединенные со счетчиком и генератором и блок управления. Недостатками такого устройства являются большие затраты оборудования и сложность организации структуры. Целью изобретения является упрощение устройства. Поставленн1ая цель достигается тем, что в устройство, содержащее блок управления, два блока умножения, генератор, два сумматора, первый счетчик, узел сдвига и элемент И, введены две схемы давления, второй счетчик, эле-, мент ИЛИ. Первый выход генератора соединен с Первьми входами первых счетчика и схемы сравнения, выход которой соединен с Первыми.входами элемента И и блока управления, вторые входы которых соединены с выходами первого блока умножения, первый и второй входы которого соединены со вторым и третьим выходами второго блока умножения. Нервый и второй выходы последнего через элемент ИЛИ соединены с первым входом второй схемы сравнения, выход которой qoeдинeн со вторым входом первого счетчика и nepBbiM входом первого сумматора, второй и третий входы которого соединены с третьим и четвертым выходами второго блока умножения. Выход элемента И через второй счетчик соединен с четвертым входом первого сумматора, третьим входом блока умножения и первым входом узла сдвига, первый выход которого срединен с четвертык входом второго блока умножения, пятый вход которого соединен со вторым выходом узла сдвига« и вторым входом второй схемы сравнения. Выходы блока управления соединены с первым и вторым входами второго сумматора, первый выход которого соединен со вторым входом узла сдвига к шестым входом второго блока умножения. Второй выход второго сумматора соединен с третьим входом блока управления. Второй вход первой схемы сравнения, третьи входы первого блока умножения и второго сумматора являются входами устройства. Выходы первого сумматора и первого счетчика являются выходами устройства. Структурная схема устройства приведена на . Устройство содержит генератор 1, блок 2 управления, блоки 3, 4 умножения, сумматоры 5, 6, счетчики 7, 8, узеп 9 сдвига, схемы 10, И. фавнения, элемент ИЛИ 12 и элемент И 13. Устройство работает следующим образом. Входная переменная Mr, в виде парал лельного двоичного кода поступает на входы блока 3, где производится умнож ние кода на синусоидальный и KOCHEiycoидальный число-импульсный код, подавав мый с информационных выходов генератора 1 на информационные вкодьг блоков умножения 3 и 4. На выходах блока 3 получаются число-импульсные последовательности двух ортогональных составляющих переменной ЧИСЛО импульсов, равное значению аргумента 90; Тт.- период следования тактовых импульсов. Число-импульсная последовательность Х через элемент И 13, управляемый схемой 10, подается на счетный вход счетчика 8. Число-импульсная последовательность V через блок 2 подается на суммирующий или вычитающий вход сумматора 6 в зависимости от сигналов на выходе схемы 10 и знакового выхода указанного сумматора, в который загносится в начальный момент времени число Мд , равное длине стороны А В косоугольного треугольника ABC, Тактовые импульсы постоянной частоты от генербг тора 1 поступают на тактовый вход схемы 10, в который заносится в начальны момент времени число , равное значанию угла оС прямоугольного треугольник ABC. В состав генератора 1 входит счетчи который произ1эодит развертывание текущего утла (аргумента) путем счета так- товых импульсов. Счетчик и cxavta сравнения работают синхронно. Через промежуток времени Тд Нп-Тт, что соответст вует моменту перехода схемы 10 через нуль, блок 2 и элемент И 13 зап1фаюрся сигналом схемы 1О. . Таким образом, решаются уравнения системы (2) и образуются требуемые проекции: в счетчике 8.Х D am Тт-М в сумматоре 6 (с учетом начальной устайовки числа N ) )CO&VN M На этом заканчивается первый этап решения задачи , в котором участвуют блок 3 генератор 1, схема 10 блок 2, , счетчик 8, сумметор 6, элементы И 13. Второй этап решения задачи начинается с того, что полученные проекции X и V в виде параллельного двоичного кода поступают на вход узла 9, где происходит сдвиг переменных X и У влево до появления старшей значащей единиЮ) в старшем разряде, наибольшей из входных переменных X и V , причем, числа сдвигов переменных X и У одинаковые. В состав узла 9 входят два односторонних сдвигателя кодов для каждой пе. ременной, которые управляются сигна лами решающего блока Последний определяет старшую значащую единицу кодов переменных X и Y . После этого на выходе решающего блока формируется код числа сдвигов влево переменных X иУ . В результате сдвигатели кодов производят сдвиг влево переменных X и У на число, определенное решающим блоком. В результате старшая значащая единица наибольшей из переменных X и У появляется в старшем разряде. Так, например, если Х 0000101О,У 00100110,. то на выходе блока сдвига 7 получим сдйинутые коды переменных Ха 00101000, Уа 100ИООО, т. 8. Ха Х-2 Уа У2, где число сдвигов . Далее-сдвинутые коды переменных поступают на Ха и У а, где Производится умножение указанных кодов на синусоидальный и конусоидальный числоимпульсный код, подаваемый с выходов генератора 1 на информационные входы блока 4 Генератор 1 вырабатывает коды синуса и косинуса, сдвинутые, во времени один относительно другого в пределах тактового импульса Тт . На выходах блока 4 получаем число-импульсные коды Ха еИпТт U fT .и Vocos Ту- Ы, которые через элемент ИЛИ 12 поступают на вход схемы 11, функцию которой выполняет вычитающий счетчик, в который заносится в начальный момент число, ра&ное величине У а. Через некоторое время Т после начала счета, приВыполнении условия cosN.t. , схема ПустаСД .л чДд 1-, . , , авливается в нулевое положение и на ыходе вырабатывается сигнал, поступаюий на входы остановки сумматора. 5 и четчика 7. Таким обр.азом, на счетчике 7 за врея счета Т ншсапливается число имульсов Н Т Дтравное углу © Д, Коды переменных X и У подаются на руппы входов X и У блока 4, где вырабатываются число-импульсные коды X совТт Nf и Vsin ТтМп,, поступаютште на входы сумматора 5, куда в начальный момент заносится вепичина, равная X. При этом код произведения ХСОзТтЫ р о flteTCff нГ вход вйчйт&нйя, а код произведения VainTVMm - йа вход езтотйсбнйя, При поступлении сигнала остановки с выхода схемы 11 иа Ьход остановки сумматора 5 на разрядных выходах последнегх) получают величину ХсоаТт + -vVainT H , равную значению искомой стороны ВС треугольника ABC. Максимальное значение угла, который может .накапливать счетчик 7, равно .
Изобретение позволяет получить более простую структуру устройства, за счет уменьшения числа логических элементов, необходимых для выполнения логических и управляющих-операций, а также, число различных типовых узлов цифровой техники, и упростить связи между блоками.
Формул а изобретения
Устройство для преобразования координат, содержащее блок управления, два блока умножения, генератор, два сумматора, первый cчetчик, узел сдвига, эле мент И, отличают ё ё с я тем, что, с целью упрощения устройства, в нег0 введены две схемы сравйения, второй сЧетчик, элемент ИЛИ, причем, выход генератора соединен с пёрвьтми входами первых счетчика и схемы сравнения, Изтход которой соединен с первыми входами элемента И и блока управления, вторые входы которых соединены с выходами первого блока умножения, первый и второй входы которого соединены со вторым и третьим выходами генератора и первым и вторым входами второго блока умножения, первый и второй
входы которого через элемент ИЛИ соединены с первым входом второй схемы сравнения, выход которой соединен со вторым входом первого счетчика и первым входом первого сумматора, второй
и третий входы которого соединены с третьим и четвертым выходами второго блока умножения, выход элемента И «leрез второй счетчик соединен с четвертым входом первого сумматора третьим
входом второго блока умножения и первымвходом узла сдвига, первый выход которого соединен с четвертым входом второго блока умножения, пятый вход которого соединен со вторым выходом
узла сдвига и вторым входом второй схемь1 сравнения, выходы блока управления соединены с первым и вторым входами второго сумматора, первый выход которого соединен со вторым входом узла сдвига и шестым входом второго блока умножения, второй выход второго сумматора соединен с третьим входом блока управления, второй вход первой схемы сравнения, третьи входы первого блока умножения и второго сумматора являются входами устройства, выход первого сумматора и первого счетчика являются выходами устр.ойства.
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 474811, кл. G 06 F 15/34, 1972. 2. Авторское свидетельство СССР № 446063, КЛ. Q 06 F 15/34, 1973 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат объекта | 1980 |
|
SU951317A1 |
| Цифровой функциональный преобразователь | 1980 |
|
SU955082A1 |
| Устройство для вычисления функций | 1978 |
|
SU824207A1 |
| Устройство для вычисления функций | 1977 |
|
SU660059A1 |
| Устройство для преобразования координат | 1984 |
|
SU1198552A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ | 2015 |
|
RU2602674C1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Устройство для отображения информации | 1986 |
|
SU1367037A1 |
| Устройство для преобразования полярных координат в прямоугольные | 1985 |
|
SU1309050A1 |
| Устройство для формирования дуг и окружностей на экране телевизионного индикатора | 1990 |
|
SU1800476A1 |