(S) ЦИФРОВОЙ ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| Устройство для преобразования координат | 1984 |
|
SU1198552A1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Цифровое устройство для преобразования координат | 1981 |
|
SU960808A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU926651A1 |
| Цифровой функциональный преобразователь | 1977 |
|
SU678488A1 |
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1332313A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| Синусно-косинусный функциональный преобразователь | 1981 |
|
SU970357A1 |

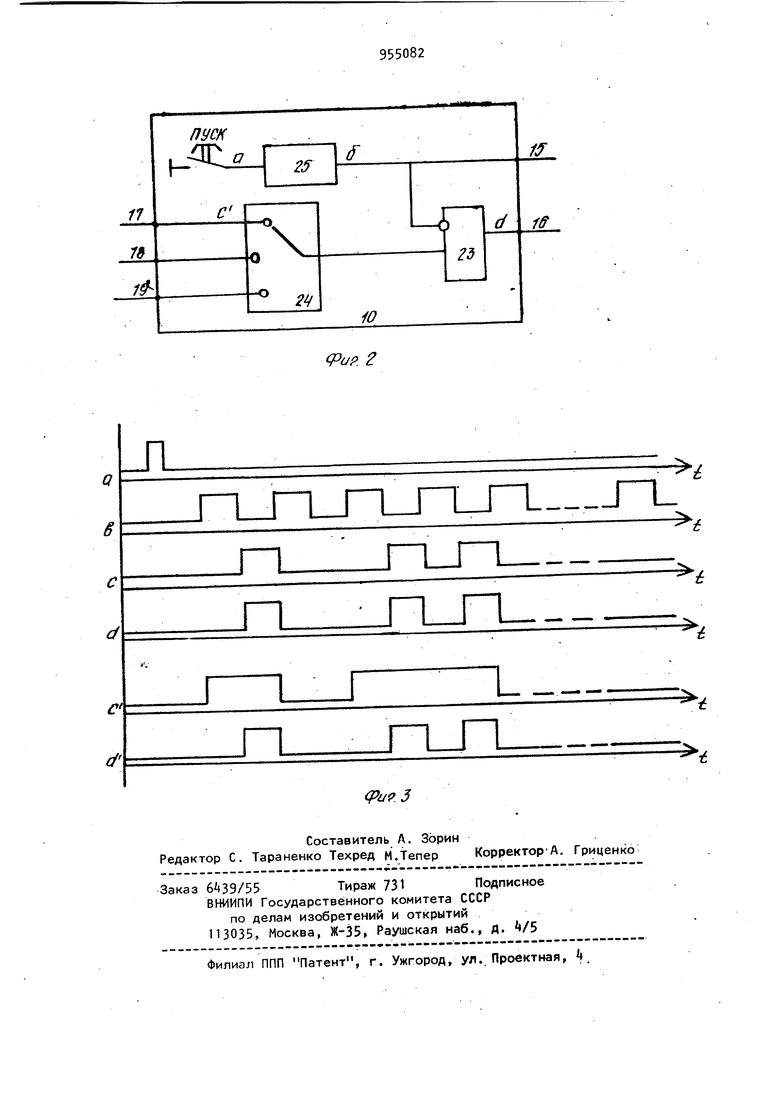
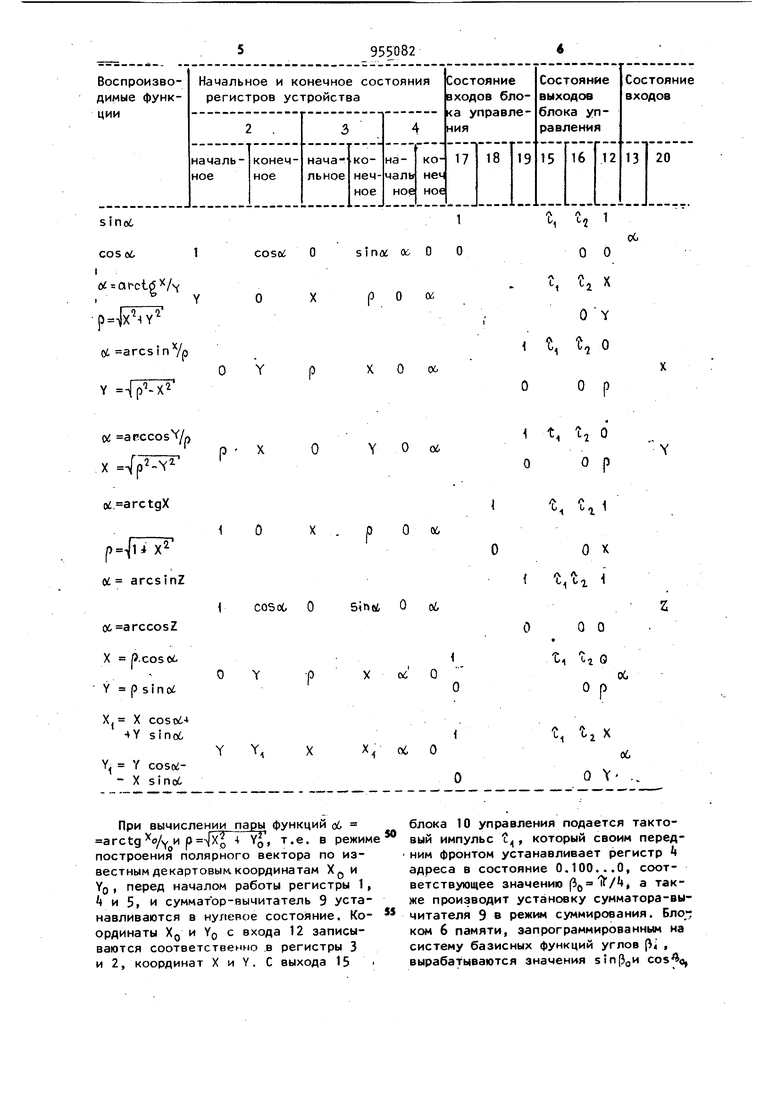
Изобретение относится к цифровой вычислительной технике и может быть использовано в устройствах цифрового автоматического управления, в тригонометрических и навигационнных вычислителях, при аппаратном вычислении элементарных функций в ЦВМ и др. Известно устройство l , основанное на итерационных методах цифра за цифрой, недостатком которого является методическая погрешность от деформации вектора, в результате че го нарушается сходимость алгоритма, например, при вычислении некоторых обратных тригонометрических функций. Для устранения указанных погрешносте необходимо значительно усложнить структуру устройства, при этом умень шается его надежность, быстроде1 ствие и функциональные возможности. Наиболее близким техническим решением к данному является устройство для преобразования прямоугольных координат в полярные, содержащее блок памяти синуса и косинуса, блок умножения, регистры, сумматор-вычитатель, коммутаторы кодов, адресный счетчик, а также триггеры и логические элементы для управления устройством. Преобразователь.основан на использовании таблично-алгоритмического метода, достоинством которого является высокое быстродействие 2 . Недостатком устройства является отсутствие возможности непосредственного вычисления таких функций, как arcsin /Y , arcos VY других. Кроме того, устройство характеризуется значительным объемом памяти для полной таблицы значений синуса и косинуса, составляющим при десяти разрядах десять тысяч бит для каждой функции. Цель изобретения - расширение класса решаемьГх задач за счет дополнительного вычисления функций вида а res Iп VY и arccos Vx 39 Поставленная цель достигается тем что S преобразователь, содержащий блок управления, промежуточный регистр, регистр координаты X, регистр координаты Y, блок умножения, коммутатор, блок памяти, регистр адреса, сумматор-вычитатель и регистр угла, причем выход регистра адреса соединен с входом блока памяти, дополнительно введена схема сравнения, причём блок управления содержит коммутатор, генератор пачки импульсов и элемент И, прямой и инверсный входы которого соединены соответственно с выходами коммутатора и генератора пачки импульсов, выход генератора пачки импульсов блока управления сое динен с синхровходами промежуточного регистра коммутатора, входами сдвига, регистра дреса, регистра угла и управляющим входом сумматора-вычитателя, выход элемента И блока управления соединен с синхровходами регистров координаты X и координаты Y и последовательным информационным входом регистра угла, параллельный информационный вход которого- соеди,нен с входом записи преобразователя 1выходы регистров угла соединены с выходом угла преобразователя, выход разрядов сумматора-вычитателя соединен с первым входом схемы сравнения второй вход которой соединен с входом задания аргумента координаты преобразователя, выход схемы сравнения соединен с первым входом коммутатора блока управления, второй . и третий входы которого соединены соответственно с выходом старшего разряда регистра угла и знаковым выходом сумматора-вычитателя, информационный вход промежуточного регистра соединен с выходом разрядов сумматора-вычитателя и информационным входом регистра координаты X, вход записи которого соединен с входом координаты X преобразователя, вход координаты Y которого соединен с входом записи регистра координаты Y, информационный вход которого соединен с выходом промежуточного регистра, выходы регистров координаты X и Y соединены с первым и вторым входами блока умножения, второй и третий входы которого соединены с выходами коммутатора, вход которого через блок памяти соединен с выходом регистра адреса, выход блока умножения соединен с входами сумматора24вычитателя, выход знакового разряда которого соединен с выходом преобразователя. На фиг. 1 представлена блок-схема преобразователя; на фиг. 2 и 3 соответственно блок-схема и временные диаграммы работы блока управления . Устройство содержит промежуточный регистр 1, регистр 2, координаты-X, регистр 3 координаты Y ,регистр k адреса, регистр 5 угла, блок 6 памяти, коммутатор 7, блок умножения 8, сумматор-вычитатель 9, блок 10 управления, схему 11 сравнения, входы 12 и 13, выходы 14, выходы 15 и Тб блока управления, входы 17-19 блока управления, вход 20 схемы сравнения, выходы 21 и 22 преобразователя. Блок управления содержит элемент И 23, коммутатор и генератор 25 пачек импульсов. Процесс воспроизведения функциональных зависимостей основан На использовании поворота вектора в прямоугольной системе координат, при этом можно получить широкий класс Тригонометрических функций одной ч двух переменных X, XpCosQ + YosinQ - S YgCOSl Подбор угла 9 осуществляется путем последовательных поворотов на некоторые фиксированные базисные углы А , удовлетворяющих условиям: , .- f n Po2-, где п - заданная разрядность, и для каждого i-ro шага или поворота ис пользуется какое-то одно значение Р),- . Очередное приближение ис-,,; комого угла равно e-erij.Po. где ( - знак поворота,- который может принимать значения О или 1 и вырабатывается в зависимости от типа воспроизводимых функций на знаковом выходе 21 или на выходе 22 старшего разряда регистра 5 угла либо на выходе схемы 11 сравнения. Ниже приводится описание работы устройства для представления чисел с фиксированной запятой перед старшим разрядом, т.е. для чисел по модулю меньше единицы. Перед началом работы задается режим работы и начальное состояние ,блоков устройства согласно таблице.
При вычислении пары функций об а г с tg р о, т.е. в режиме построения полярного вектора по известным декартовым, координатам XQ и YO, перед началом работы регистры 1, и 5, и сумматор-вычитатель 9 устанавливаются в нулевое состо;яние. Координаты XQ и YO с входа 12 записываются соответственно в регистры 3 и 2, координат X и Y. С выхода 15
блока 10 управления подается тактовый импульс f., который своим передним фронтом устанавливает регистр k адреса в состояние 0.100...О, соответствующее значению (,11/ а также производит установку сумматора-вычитателя Э в режим суммирования. Блоком 6 памяти, запрограммированным на систему базисных функций углов i i вырабатываются значения cosio,
поступающие через коммутатор 7 кодов на соответствующие входы блока 8 умножения для перемножения со знамениями координат XQ и YQ. Полученные произведения X cospo и Yosinpo суммируются в сумматоре-вычитателе 9, т.е. получаем приближение X, системы уравнений (l .
Полученное значение Х записывается в накапливающий регистр.1, по заднему фронту тактового импульса i. с выхода 15s по которому также производится переключение коммутатора 7 кодов выходов синуса и косинуса блока 6 памяти .и установка сумматора-вычитателя 9 в режим вычитания. Блоком 8 умножения вырабатываются произведения вида X sinpo и YJJ cos|3u, которые подаются на входы сумматора-вычитателя 9, выполняющего операцию вычитания, 20 в результате которого получаем первое приближение Y системы уравнений lT. С выхода 21 знакового разряда сумматора-вычитателя 9, т.е. в зависимости от знака Y формируется сигнал поступающий на вход 18 блока 10 упра ления. Если величина Y положительная, то на выходе 1б блока 10 управления появляется тактовый импульс tj, который разрешает запись Х, из.н§капли веющего регистра 1 в регистр 3 координаты X, запись Y в регистр 2 координаты Y, а также запись единицы в младший разряд регистра 5 угла. Если величина Y отрицательная, то в ре гистрах 2 и 3, координат X и Y сохраняется информация XQ и YO, а в мла ший разряд регистра 5 угла заносится ноль, т.е. производится пропуск результата такта для угла та как искомый угол сх меньше по крайней мере 5 град. При поступлении следующего тактового импульсе Sl с выхода 15 его передним фронтом производится сдвиг содержимого регистра 4 адреса.на оди разряд вправо, т.е. в состояние; 0.010 ...О, что соответствует , сумматор-вычитатель 9 устанавливаетс в режим суммирования, каналы синуса косинуса коммутатором 7 переключаются в исходное положение, а содержимое регистра 5 угла продвигается на один разряд влево для приема очередн цифры искомого угла. В дальнейшей вычислительный процесс продолжается согласно описанному выше до набора заданного чиспа итераций, которое
определяется заданной точностью и в конкретном устройстве постоянно. В результате чего в накапливающем регистре 1 получаем модуль полярного вектора., а в регистре 5 угла полярный угол с .
При вычислении пары функций sino6 и COS06 устройство работает аналогично, вышеописанному. Разница состоит в том, что в регистры 2 и 3 координат X и Y вводятся соответственно и Х 0, что соответствует начальным условиям cos 90 и sin 90. Код аргумента об через вход 13 вводится в регистр 5 угла. Сдвигая содержимое регистра 5 угла, каждый разряд кода аргумента последовательно выводится, начиная со старшего разряда, через выход 22 регистра 5 угла на вход 17 блока 10 управления. Если на выходе 22 имеется единица, то на выходе 16 блока 10 управления появляется тактовый имупльс t2, который разрешает запись вычисленных из накапливающего регистра 1 и Y в Ьегистры 2 и 3 координат X,Y. Если на выходе 22 имеется ноль, то в регистрах 2 и 3 координат X и Y сохраняются результаты предыдщуей итерации Х,. и . . Результат $ псх1и coso6 получаем в регистрах 2 и 3 координат X и Y, При вычислении пары функций об Y - p -x отличие в работе от вышееписанного состоит в том, что согласно таблице, на информационные входы схемы 11 сравнения подается через вход 20 код известной координаты X, в регистр 3 координаты Y вводится код известного модуля радиуса-вектора р , регистр 5 угла устанавливается в нулевое состояние. На каждом шаге вычислений производится выдача сигна.ла с выхода схемы 11 сравнения на вход 19 блока 10 управления. Если X Х, то на выходе схемы 11 сравнения устанавливается единица, и на выходе 16 блока управления появляется тактовый импульс , который разрешает запись Х И Y в регистры 2 и 3 а также производится запись единицы в младший разряд регистра 5 угла. Если X Х, то на выходе схемы 11 сравнения устанавливается ноль и в регистрах 2 и 3 сохраняются значения (И , а в младший разряд регистра 5 угла заносится ноль. Воспроизведение других функциональных зависимостей осуществляется согласно таблице с учетом заданного режима работы. Эффективность предлагаемого цифрового функционального преобразователя заключается в расширении класса решаемых задач за счет увеличения числа воспроизведений функций одной и двух переменных, приведенных в таблице. Кроме того, возможно в несколько раз по сравнению с прототипом уменьшить объем дорогостоя|цих блоков памяти, так как блок памяти прототипа содержит значения функций синуса и косинуса с дискрет ностью По аргументу 0,352°, что для интервала. (0+90°), составляет 2(8-2 бит. Для такой же точности предлагаемому устройству необходимы не более десяти 10-разрядных слоев синуса и столько же для-косинуса, итого не более 200 бит. Таким образом, объем блоков памяти уменьшается почти в двадцать раз. Формула изобретения Цифровой функциональный преобразов.атель, содержащий блок управления промежуточныи регистр, регистр координаты X, регистр координаты Y, блок умножения, коммутатор, блок памяти, регистр адреса, сумма тор-вы читатель и регистр угла, причем выход регистра адреса соединен с входом бл ка памяти, отличающийся тем, что, с. целью расширения класса задач путем дополнительного вычисления функций вида arcs arcosV. 8 него введена схема сравнения, причем блок управления содержит коммутатор, генератор пачки импульсов и элемент И, прямой и инверс ный входы которого соединены соответственно с выходами коммутатора и генератора пачки импульсов, выход генератора пачки импульсов блока уп равления соединен с синхровходами пр межуточного регистра коммутатора, входами сдвига регистра адреса, регистра угла и управляющим входом сумматора-вычитателя, выход элемента И блока управления соединен с синхровходами регистров координаты X и координаты У и последовательным информационным входом регистра угла, параллельный информационный вход которого соединен с входом записи преобразователя, выход регистра угла соединен с выходом угла преобразователя, выход разрядов сумматора-вычитателя соединен с первым входом схемы сравнения, второй вход которой соединен с входом задания аргумента координаты преобразователя, выход схемы сравнения соединен s:. первым входом коммутатора блока управления, второй и третий входы которого соединены соответственно с выходом старшего разряда регистра угла и знаковым выходом сумматора-вычитателя, информа ционный вход промежуточного регистра соединен с выходом разрядов сумматора-вычитателя и информационным эходом регистра координаты X, вход записи которого соединен с входом координаты X преобразователя, вход координаты Y которого соединен с входом записи регистра координаты Y, информационный вход Которого соединен с выходом промежуточного регистра, выходы регистров координаты X и Y соединены с первым и вторым входами блока умножения, второй и третий которого соединены с выходами коммутатора, вход которого чере.з блок памяти соединен с .выходом регистра адреса, выход блока умножения соеди 1 нен с входами сумматора-вычитателя выход знакового разряда которого соединен с выходом преобразователя. Источники информации, пpиняtыe во внимание при экспертизе 1.Авторское сврщетельство СССР № кл. G Об F 15/3, 1977. 2.Патент США № 3952187, кл. 235-186, опублик. 1978 (прототип) .
1
12
HL.
f It
/ff
J7
fO
fd
r
20
Pu(. 2
