Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных вычислительных средствах информационно-измерительных систем и радиоэлектронных устройствах.
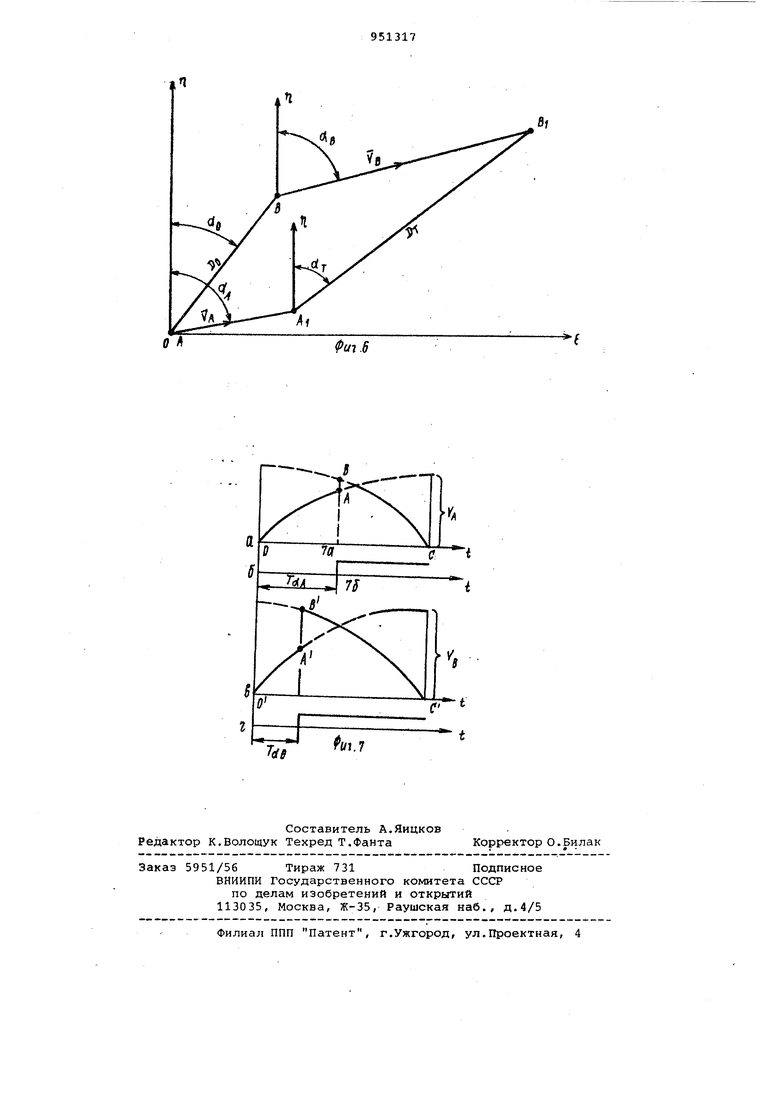
При решении ряда задач управления и измерения возникает необходимость моделирования взаимного перемещения объектов с последующим пересчетом координат одного подвижного объекта относительного другого подвижного объекта, например в счетно-решающих устройствах тренажеров. Определение полярных координат подвижного объекта относительно другого сводится к нахождению текущей дальности 0 (отрезок ) и текущего угла oL (угол I..,), где A.J - точка местоположения объекта А через время t, В точка местоположения объекта В через время t. В начальный момент с точкой состояния объекта А связана некспорая неподвижная система координат У , начало которой совпадает с точкой А. Местоположение объекта В на плоскости относительно точки стояния объекта А задается начальными полярными координатами дальности DQ (отрезок АВ) и угла cLc между осью о, и отрезком АВ.
При этом скорости и направления перемещения объектов А- и В выражаются через векторы Уд и Vg в плоскости tf о. 5 Для решение задачи первоначально векторы Уд и Vg раскладываются на ортогональные составляющие с последующим . вычитанием их координат
Уь Ур-51пс(р-Уд- 51пг1д ,,;
. /- . . . , /V .
. СОЗЫд-Уд. СО5о(д
где УЬ и У| - ортогональные составляющие результирующего вектора скорости. Далее производится интегрирование составляющих результирующего вектора скорости за... время t
Д Г yfedt, дц dt(2).
L1 Л Н ГттЛП ЯТтТ I
где д и лг приращение координат объекта В относительно объекта А. Одновременно с разложением векторов Уд 20 Уд производится разложение начальной дальности Dp на координатные оси
г и о
DoSinio;
(3)
Vl.-DpCOSd-o.
2 хоторые суммируются с координатами дЬ и д , т.е. в результате получа.ем выг-лжения t
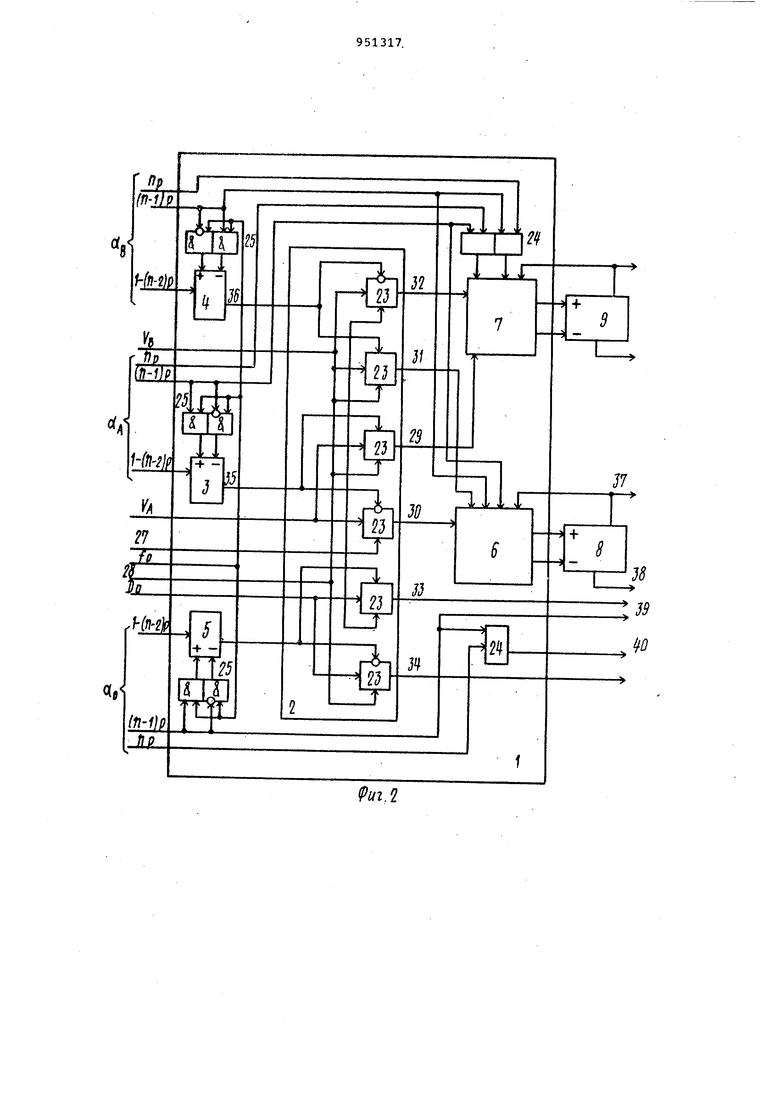
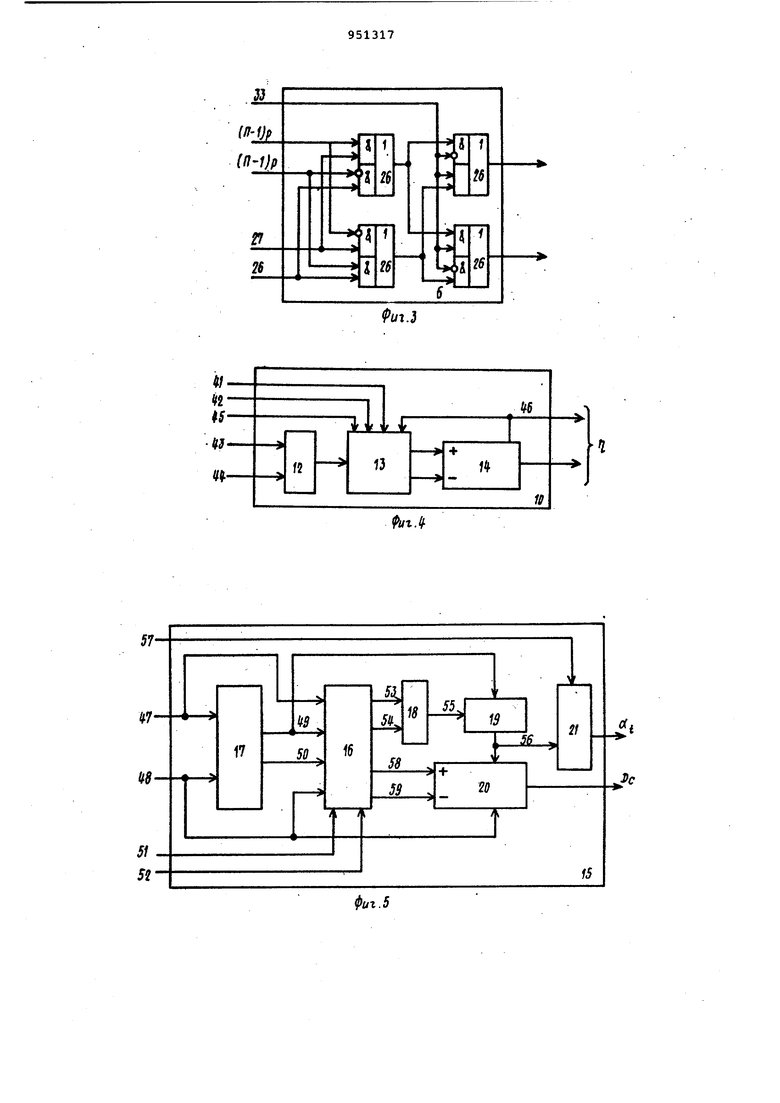
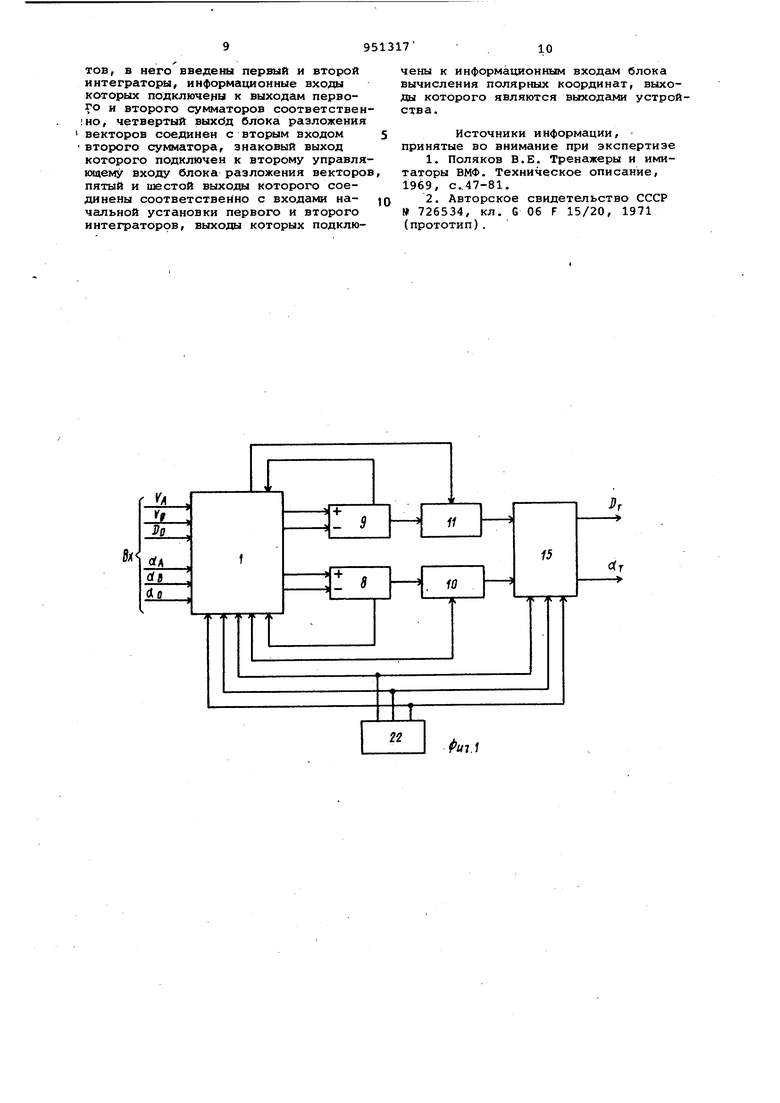
DO S i п rfo Г (/д 5 i - Уд S i п с/д) d t, , DO. (Vg. co q:в-Уд-cos д)dt, о(4) представляющие собой координаты объекта в относительно объекта А в прямоугольных координатах, которые в дальнейшем преобразуются в полярные оС arctgО (6) JTaKHM образом, решение задач -произво дится в три этапа: разложение векторов Vp, Vu и дистанции 0 на ортогональные составляющие с последующим вычитанием векторов Уд и Vg в соответствии с формулой (1); интегрирование ортогональных составляющих результирующего вектора скорости и суммирование с составляющими дистанции DO в соответствии с Формулой (4) по полученным прямоугольным составля ющим определяются полярные координаты объекта В относительно объекта А с помощью формул (5) и (6). Следовательно реализовать указанную задачу моделирования взаимного перемещения объектов с последующим пересчетом ко ординат одного подвижного объекта относительно другого подвижного объе та можно с помощью вычислительных устройств, осуществляющих прямое и обратное преобразования координат, а также интегрирование. Известно аналоговое электромехани ческое счетно-решающее устройство, с помощью которого реализуется поставленная задача l. Это устройство имеет ряд недостатков, присущих электромеханическим устройствам: значительные габариты, вес и электропотребление, невысокая надежность, а также большие кинемати ческие и динамические ошибки. Наиболее близким техническим реше нием к изобретению является устройство для преобразования координат об екта, содержащее блок вычисления полярных координат, блок разложения векторов, первый и второй выходы которого подключены соответственно к первому и второму входам первого сум матора, знаковый выход которого соединен с первым управляющим входом блока разложения векторов, третий вы ход которого подключен к первому вхо ду второго сумматора, и генератор им пульсов, первый, второй и третий выходы которого соединены соответствен но с входами тактовых импульсов, синусного кода и косинусного кода блok вычисления полярных координат и блока разложения векторов, информационные входы которого являются входами устройства. С помощью данного устрой ства можно реализовать прямое и обра ное преобразования координат для вычисления координат объекта 1управления (3),(5), (6)) . Устройство реализу ет число-импульсный -способ преобразования координат. Оно характеризуется простотой схемного решения, высокой точностью вычисления, малымк габаритами 2j. .Однако с помощью этого устройства нельзя реализовать задачу моделирования взаимного перемещения объектов. Цель изобретения - расширение функциональных возможностей устройства за счет определения относительных координат двух перемещающихся объектов. Указанноя цель достигается тем, что в известное устройство дополнительно введены первый и второй интеграторы, информационные входы которых подключены к выходам первого и второго сумматоров соответ-ственно, четвертый выход блока разложения векторов соединен с вторым входом второго сумматора, знаковый выход которого подключен к второму управляющему входу блока разложения векторов,пятый и шестой выходы которого соединены соответственно с входами начальной установки первого и второго интеграторов, выходы которых подключены к информационным входам блока вычисления полярных координат, выходы которого являются выходами устройства. На фиг.1 представлена блок-схема устройства; на фиг.2 - функциональная схема блока разложения векторов; на фиг.З - функциональная схема блока управления, входящая в блок разложения векторов; на фиг.4 - функциональная.схема интегратора; на фиг.5функциональная схема блока вычисления полярных координат; на фиг.б геометрический чертеж решаемой задачи; на фиг.7 - временные диаграммы работы блока разложения векторов. Устройство содержит блок 1 разложения векторов, осуществляющий выработку текущих значений ортогональных составляющих дистанции Од, векторов скорости Уд и VP в виде число-импульсных кодов, который состоит из блока 2 умножения, схем 3-5 сравнения (выполненных на реверсивных счетчиках), блоков б и 7 управления, сумматоры 8 и 9 (выполненные на реверсивных счетчиках) , интеграторы 10 и 11 для интегрирования составляющих результирующего вектора скорости, состоящие из блока 12 приращения (выполненного на управляемых делителях частоты), блока 13 управления и накопителя 14 (выполненного на реверсивных счетчиках), блок 15 вычисления полярных координат, состоящий из блока 16 умножения (выполненного на управляемых делителях частоты), блока 17 сдвига, элемента. ИЛИ 18, компаратора 19, сумматоров 20 генератор 22 импульсов для генерирования тактовой частоты синусного и косинусного число-импульсных кодов. Блок 2 выполнен на управляемых делителях 23 частоты, кроме того, блок 1 включает элементы ИЛИ 24 и И 25. Блок ,6. управления выполнен на элементах 2И-ИЛИ 26.
Работа устройства производится в три этапа. Входные переменные скорое ти объекта А Уд, объекта В Vg и дальности Dp в виде параллельных двоичных кодов поступают на информационны входы блока 2 умножения, входящего в состав блока 1 разложения векторов .2), где производится умножение кодов, УдУр и Од на синусный и косинусный число-импульсные коды, подаваемые с выходов генератора 22 на функциональные входы 27 и 28 блока 2 умножения. На выходах 29-34, блока 2 умножения получаем число-импульсные последовательности ортогональных составляющих переменных V ,V и D
VA VA-sinri T. °
VA, VA. .
IB Vg. . .
VB,, Vg. созоС Тт.
DO DO- s ,
°(Щ DO- . где ct - число импульсов, равное
значению аргумента; TY - период следования тактовых импульсов.
Тактовые импульсы f постоянной частоты с выхода генератора 22 посту- пают в зависимости от значения (п-1)ых разрядов полярных углов , oi g на суммирующий или вычитающий вход схем 3 и 4 сравнения, функцию которых выполняют реверсные двоичные счетчики, в которые в начальный момент времени заносятся коды (п-2)-го разряда углов соответственно , при этом выходы .35 и 36 запрета с (п + 1,)-ых разрядов схем 3 и 4 сравнения, где п - число разрядов, равное 90°, углов , ot g и Через промежуток времениТа(д г (фиг. 7) что соответствует моменту перехода (п+1)-го разряда схемы 3 сравнения с нуля в единицу, блок 2 умножения запрещает прохождению число-импульсного кода Уд- S i п с(уу,Т . В результате полученный число-импульсный код Уд (Хд (кривая ОА, фиг.7,р) с выхода 27 блока 2 умножения поступает через блок 6 управления, выполненный на элементах 2И-ИЛИ 26 (фиг.З), на су и1мирующий или вычитающий входы сумматора 8 в зависимости от значения (n-l)-ro разряда угла , а также от знака знакового выхода 37 сумматора 8. Одновременно на выходы сумматора 8 выхода 30 блока 2 умножения поступает число-импульсный код. Vg-sinoC., запрет прохождения которого определяет схема 4 сравнения. Момент перехода (п+1)-го разряда схемы 4 равен , 190°-с р) Т (фиг.7,г,) т.е. соответствует обратному коду угла , следовательно, на суммирующий или вычитающий входы сумматора
8в зависимости от значения (n-l)-ro разряда углао р, а также от знака знакового выхода 37 поступает число-импульсный код V. sinrfg (кривая в с , фиг.7,),такая операция производится для возможности алгебраического суммирования кодов Vg, oLQ за счет того, что вырабатываемые генератором 22 число-импульсные коды синуса и косинуса сдвинуты во времени друг относительно друга в пределах тактового импульса 11 . В результате на выходе 38 сумматора 8 образуется требуемая ортогональная составляющая Vb результирукицего вектора скорости уравнения (1), знак которой вырабатывается на выходе 37 знакового разряда сумматора 8. Вторая ортогональная составляющая результирующего вектора скорости образуется в сумматоре
9аналогично сказанному, где участвуют схема 4 сравнения и блок 2 умножения, с выходов 29, 32 которого число-импульсные КОДЫУд- COSo(y VgC05a j.
кривые ВС и О А , (фиг.Та,)) поступают на входы сумматора 9 в зависимости от значений п и (п-1)-ых разрядов углов о( д и , поступающих на блок 7 управления через элементы 2И-ИЛИ 26. Таким образом, решается уравнение системы (1)
. sino(g-V. sino, Vg. . cosodg.
Кроме того, одновременно с реализацией уравнений системы II) происходит разложение начальной дальности Од на ортогональные составляющие (.ff Dob и Of,- ) в виде число-импульсных кодов, полученные на выходах 33 и 34 блока 2 умножения, в котором участвует схема сравнения 5, причем знаком ортогональной составляющей на выходе 39 является (п-1)-ый раз- ряд угла г а знак ортогональной составляющей вырабатывается на выходе 40 элемента 26. На этом заканчивается первый этап решения задачи, в котором участвуют блок 1 разложения векторов (блок умножения 2, блоки 6 и 7 управления, схемы 3-5 сравнения), сумматоры 8 и 9 и генератор 22.
Второй этап решения задачи начинается с того, что полученные число-импульсные коды 0(jb и Opfj записываются соответственно в интеграторы 10 и 11 т.е. число-импульсный код Ось, поступающий на вход 41 начгшьной установки интегратора 10 (фиг.4), записывается через блок 13 управления на суммирующий или вычитающий входы накопителя 14 в зависимости от знака кода DO, поступаюцего на вход 42 интегратора 10 один раз, при вычислении управлений системы (1). Аналогично записываются
код Qf в интегратор 11. Ортогональная составляющая V результатирующего вектора скорости в виде параллельного кода поступает на информационный вход 43 блока 12 приращения, инг тегратора 10. Тактовые импульсы с фиксированной частотой повторения, представлякшше собой приращение независимой переменной, поступают на тактовый вход 44 блока 12 приращения. Импульсы переполнения блока 12 приращения являются выходной величиной приращения координаты и поступают через блок 13 на суммирующий или вычитающий входы накопителя 14 в зависимости от поступающего на вход 45 знака ортогональной составляющей Ул, а также от знакового выхода 46 накопителя 14. В результате через промежуток времени t на выходе накопителя 14 получаем выражение
OoSin o- - I Vg-s . )dt, знаки которого вырабатываются на выходе 46 накопителя 14. Аналогично с интегратора 11 получаем выражение
1 I oCOSo(o (.вС05о(.в-УдС05о1.А:)й1.
На этом заканчивается второй этап решения задачи, в котором участвуют интеграторы 10 и 11.
Третий этап решения задачи начинается с того, что полученные проекции и 1 в виде параллельного двоичного кода поступают на информационные входы 47 и 48 блока 15 (фиг.5), а именно на его блок 17 сдвига, где происходит сдвиг переменных и влево до появления старшей значащей единицы в старшем разряде, наибольшей из входных переменных н , причем число сдвигов переменных и одинаково. Далее сдвинутые коды переменных и | /тоступают на группы входов 49 и 50 ( о la блока 16 умножения блока 15, где производится умножение указанных кодов на синусный и косинусный число-импульсные ,коды, подаваемые с выходов генератора 22 на функциональные входы 51 и 52 блока 16. На выходах 53 и 54 блока 16 умножения получаем число-импульсные коды sin и COSot-niT,. , которые через элемент ИЛИ 18 поступают на вход 55 сравнения компаратора 19, функцию которого выполняет вычитающий счетчик, в который заносится в начальный момент число, равное величине У. Через время Т после начала счета при выполнении условия
c,siii oL T ПаСо5о1 „Т,.
компаратор 19 устанавливается в нулевое положение и на его выходе 56 .вырабатывается сигнал, поступающий
на входы остановки счета сумматора 20 и сумматора 21, на вход 57 которого поступает от генератора 22 фик.-сированная частота fо. Таким образом на выходе сумматора 21 за время счета Т накапливается число импульсов , равное углуо т arctg. Одновременно на выходах 58 и 59 блока 16 вырабатываются число-импульсные коды - совЫ,Тт и ) co, поступающие на входы cyN MaTopa 20, функцию которого выполняет реверсный двоичный счетчик, куда в начальный момент заносится величина,равная , причем код произведения cos о( подается на счетный вход вычитания, а код произведения t 91И - на счетный вход сложения. При поступлении сигнала остановки счета с выхода 52 компаратора 19 на вход остановки счета сумматора 20 на разрядных выходах последнего получаем величину
. cosdi +Y - (7 , равную значению исковой дальности Оу. Максимальное значение угла, который может накапливать сумматор 21,
90
На этому заканчивается третий
этап задачи, в котором участвует блок 15 (блок 17 сдвига, блок 16 умножения элемент ИЛИ 18, компаратор 19, сумматоры 20 и 21) и генератор 22.
Введение в устройство первого и второго интеграторов и наличие указанных связей между блоками по сравнению с прототипом расширяет функциональные возможности путем моделирования взаимного перемещения объектов, что позволяет применять предлагаемое устройство в качестве вычислителя в тренажерах для обучения операторов радиолокационных станций.
Формула изобретения
Устройство для преобразования координат объекта, содержащее блок вычисления полярных координат, блок разложения векторов, первый и второй выходы которого подключены соответственно к первому и второму входам первого сумматора, знаковый выход которого соединен с первым управляющим входом блока разложения векторов третий выход которого подключен к первому входу второго сумматора, и генератор импульсов, первый, второй
и третий выходы которого соединены соответственно с входами тактовых импульсов, синусного кода и косинусного кода блока вычисления полярных координат и блока разложения векторов, информацион-ные входы которого являются входами устройства, о т л ич ,а.ю щ е е с я тем, что, с целью расширения функциональных возможностей за счет определения относительны
65 координат двух перемещающихся объектов, в него введены первый и второй интеграторы, информационные входы которых подключены к выходам первого и второго сумматоров соответствен:но, четвертый блока разложения векторов соединен с вторым входом второго сумматора, знаковый выход которого подключен к второму управлякмцему входу блока разложения векторов пятый и шестой выходы которого соединены соответственно с входами начальной установки первого и второго интеграторов, выходы которых подключены к информационным входгш блока вычисления полярных координат, выходы которого являются выходами устройства.
Источники информации, принятые во внимание прн экспертизе
1.Поляков В.Е. Тренажеры н имитаторы ВМФ, Техническое описание, 1969, с.47-81.
2.Авторское свидетельство СССР № 726534, кл. G 06 F 15/20, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора локационных станций | 1982 |
|
SU1072086A2 |
| Цифровой функциональный преобразователь | 1980 |
|
SU955082A1 |
| Устройство для преобразования координат | 1984 |
|
SU1198552A1 |
| Устройство для преобразования координат | 1977 |
|
SU726534A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Генератор векторов | 1986 |
|
SU1361613A1 |
| Многоканальное операционное устройство | 1982 |
|
SU1124292A1 |
| Генератор векторов | 1987 |
|
SU1462403A1 |
| Устройство тактовой синхронизации | 1985 |
|
SU1332552A1 |