Изобретение относится к измерительной технике.
Известен способ измерения площади фигуры, заключающийся в том, что построчно сканируют изображение фигуры, управляют частотой генератора масштабирующих- импульсов в функции, например скорость сканирования, и суммируют масштабирующие импульсы 1.
. Невысокая точность измерения площади по известному способу обусловлена различными контурами фигур и их ориентацией.
Известен способ измерения.площади фигуры, заключающийся в том, что построчно сканируют изображение фигуры, суммируют видеосигналы и изменяют направление сканирования по окончании сканирования кадра 2.
При этом после сканирования каждого кадра изменяют направление сканирования, выделяют сигнал начала сканирования фигуры, задерживают его на время длительности строки и на время длительности элемента разложения, сравнивают исходный и задержанный видеосигналы, нормируют полученный сигнал по
амплитуде, суммируют его с полученным ранее видеосигналом и измеряют результирующий сигнал. Операции повторяют до тех пор, пока суммарный сигнал не перестанет увеличиваться.
Этот способ является по своей технической сущности наиболее близким к изобретению.
Однако при его реализации тре10буется высокое отношение сигнал/шум изображения. В противном случае недопустимо велика вероятность ошибки при разделении импульсов от объекта и фона.
15
Целью изобретения является повышение точности измерения площади фигуры в условиях низкого отношения сигнал/шум.
Это достигается тем, что сумми20рование сигнала, непосредственно связанного с оптической плотностью изображения, производят за время развертки каждой строки и для каждого направления сканирования
25 строят одномерный сигнал, отсчеты которого представляют собой указанные суммы, определяют пороговый уровень путем последовательного его /величения, до обеспечения появ;1е30
ния только двух пересечений с этим сигналом, определяют параметры сигнала, отсекаемого найденным порогов уровнем,и по их величине судят о плщади фигуры.
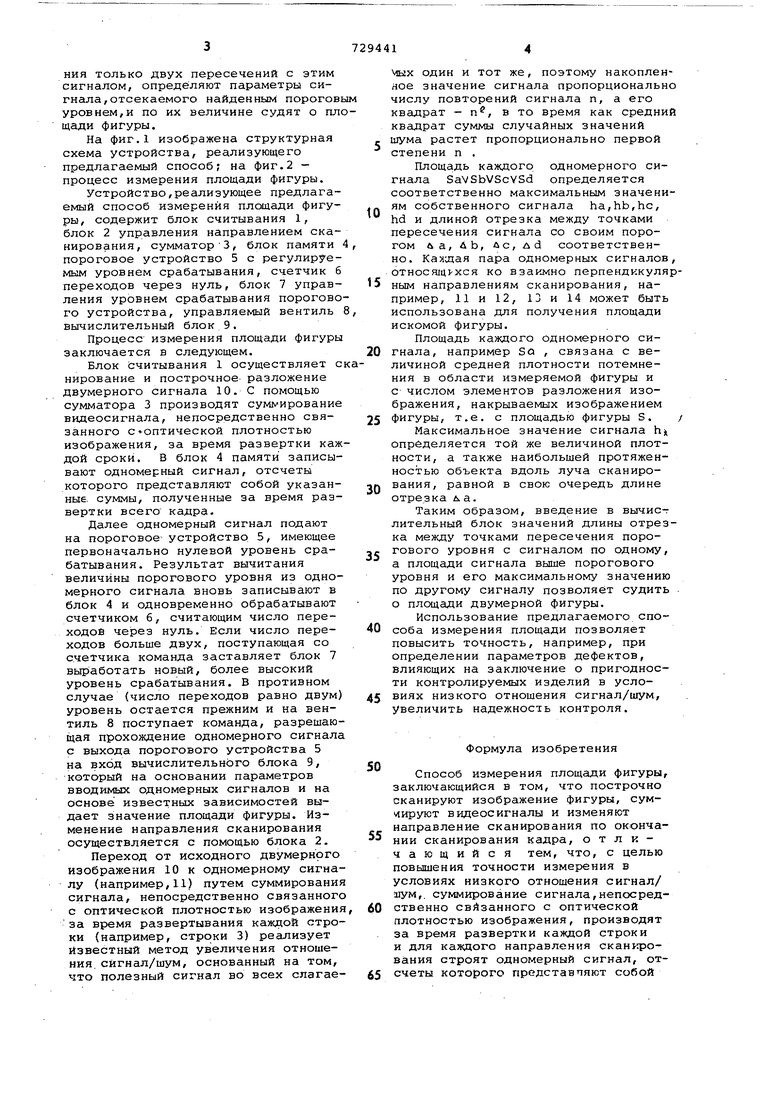
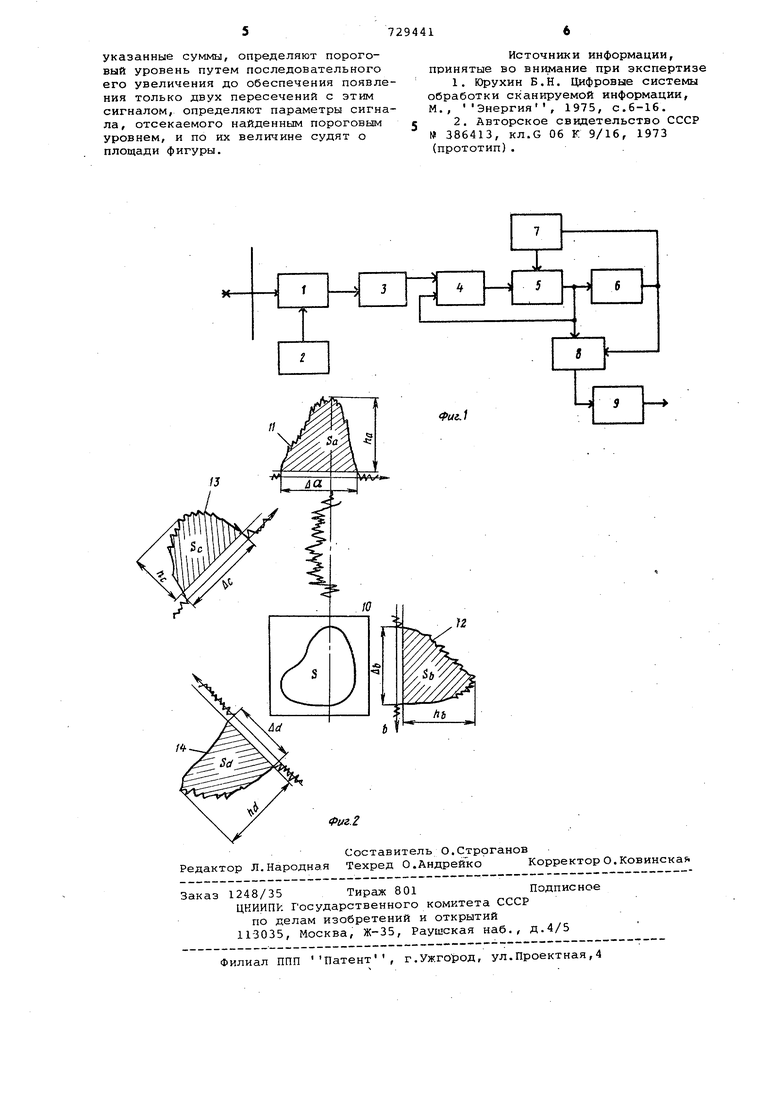
На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ; на фиг.2 - процесс измерения площади фигуры.
Устройство,реализующее предлагаемый способ измерения площади фигуры, содержит блок считывания 1, блок 2 управления направлением сканирования, сумматор3, блок памяти пороговое устройство 5 с регулируемым уровнем срабатывания, счетчик 6 переходов через нуль, блок 7 управления уровнем срабатывания порогового устройства, управляемый вентиль вычислительный блок 9.
Процесс измерения площади фигуры заключается в следующем.
Блок считывания 1 осуществляет снирование и построчное, разложение двумерного сигнала 10. С помощью сумматора 3 производят cyMN-HpoBEHHe видеосигнала, непосредственно связанного с «-оптической плотностью изображения, за время развертки каждой сроки. В блок 4 памяти записывают одномерный сигнал, отсчеты которого представляют собой указанные, суммы, полученные за время развертки всего кадра.
Далее одномерный сигнал подают на пороговое устройство 5, имеющее первоначально нулевой уровень срабатывания. Результат вычитания величины порогового уровня из одномерного сигнала вновь записывают в блок 4 и одновременно обрабатывают счетчиком б, считающим число переходов через нуль. Если число переходов больше двух, поступающая со счетчика команда заставляет блок 7 вьфаботать новый, более высокий уровень срабатывания. В противном случае (число переходов равно двум) уровень остается прежним и на вентиль 8 поступает команда, разрешающая прохождение одномерного сигнала с выхода порогового устройства 5 на вход вычислительного блока 9, который на основании параметров вводимых одномерных сигналов и на основе известных зависимостей выдает значение площади фигуры. Изменение направления сканирования осуществляется с помощью блока 2.
Переход от исходного двумерного изображения 10 к одномерному сигналу (например,11) путем суммирования сигнала, непосредственно связанного с оптической плотностью изображения за время развертывания каждой строки (например, строки 3) реализует известный метод увеличения отношения. сИгнал/шум, основанный на том, что полезный сигнал во всех слагаеМых один и тот же, поэтому накопленное значение сигнала пропорциональн числу повторений сигнала п, а его квадрат - п, в то время как средни квадрат суммы случайных значений шума растет пропорционально первой степени п .
Площадь каждого одномерного сигнала SaVSbVScVSd определяется соответственно максимальным значениям собственного сигнала ha,hb,hc, hd и длиной отрезка между точками пересечения сигнала со своим порогом ла, ДЬ, Дс, Ad соответственно. Каидая пара одномерных сигналов ОТНОСЯЩ1-ХСЯ ко взаимно перпендикуляным направлениям сканирования, например, 11 и 12, 13 и 14 может быть использована для получения площащи искомой фигуры.
Площадь каждого одномерного сигнала, например SQ , связана с величиной средней плотности потемнения в области измеряемой фигуры и с числом элементов разложения изображения, накрываемых изображением фигуры, т.е. с площадью фигуры S.
Максимальное значение сигнала hj определяется той же величиной плотности, а также наибольшей протяженностью объекта вдоль луча сканирования, равной в свою очередь длине отрезка 6. а.
Таким образом, введение в вычислительный блок значений длины отрезка между точками пересечения порогового уровня с сигналом по одному, а площади сигнала выше порогового уровня и его максимальному значению по другому сигналу позволяет судить о площади двумерной фигуры.
Использование предлагаемого способа измерения площади позволяет повысить точность, например, при определении параметров дефектов, влияющих на заключение о пригодности контролируемых изделий в условиях низкого отношения сигнал/шум, увеличить надежность контроля.
Формула изобретения
Способ измерения площади фигуры, заключающийся в том, что построчно сканируют изображение фигуры, сум«лируют видеосигналы и изменяют направление сканирования по окончании сканирования кадра, отличающийся тем, что, с целью повышения точности измерения в условиях низкого отношения сигнал/ пум,, суммирование сигнала,непосредственно связанного с оптической плотностью изображения, производят за время развертки каждой строки и для каждого направления сканирования строят одномерный сигнал, отсчеты которого представпяют собой
указанные суммы, определяют пороговый уровень путем последовательного его увеличения до обеспечения появления только двух пересечений с этим сигналом, определяют параметры сигнала, отсекаемого найденным пороговым уровнем, и по их величине судят о площади фигуры.
Источники информации, принятые во внимание при экспертизе
1.Юрухин Б.Н. Цифровые системы обработки сканируемой информации, М., Энергия, 1975, с.6-16.
2.Авторское свидетельство СССР № 386413, кл.С 06 К 9/16, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1805822A1 |
| Способ автоматического контроля дефектов поверхности деталей и изделий | 1990 |
|
SU1782314A3 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1994 |
|
RU2140720C1 |
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| Способ компенсации геометрического шума в видеопоследовательности инфракрасных изображений, основанный на анализе наблюдаемой сцены | 2020 |
|
RU2744483C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| СПОСОБ НИЗКОШУМОВОГО КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ | 1997 |
|
RU2201654C2 |
| СПОСОБ ПОСТРОЕНИЯ И ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2019 |
|
RU2728949C1 |
| Способ формирования видеосигнала изображения | 1986 |
|
SU1462513A1 |
| СПОСОБ ЗАПИСИ НА ПОВЕРХНОСТЬ МАСШТАБИРОВАННОЙ КОПИИ ИЗОБРАЖЕНИЯ-ОРИГИНАЛА | 1994 |
|
RU2074410C1 |
