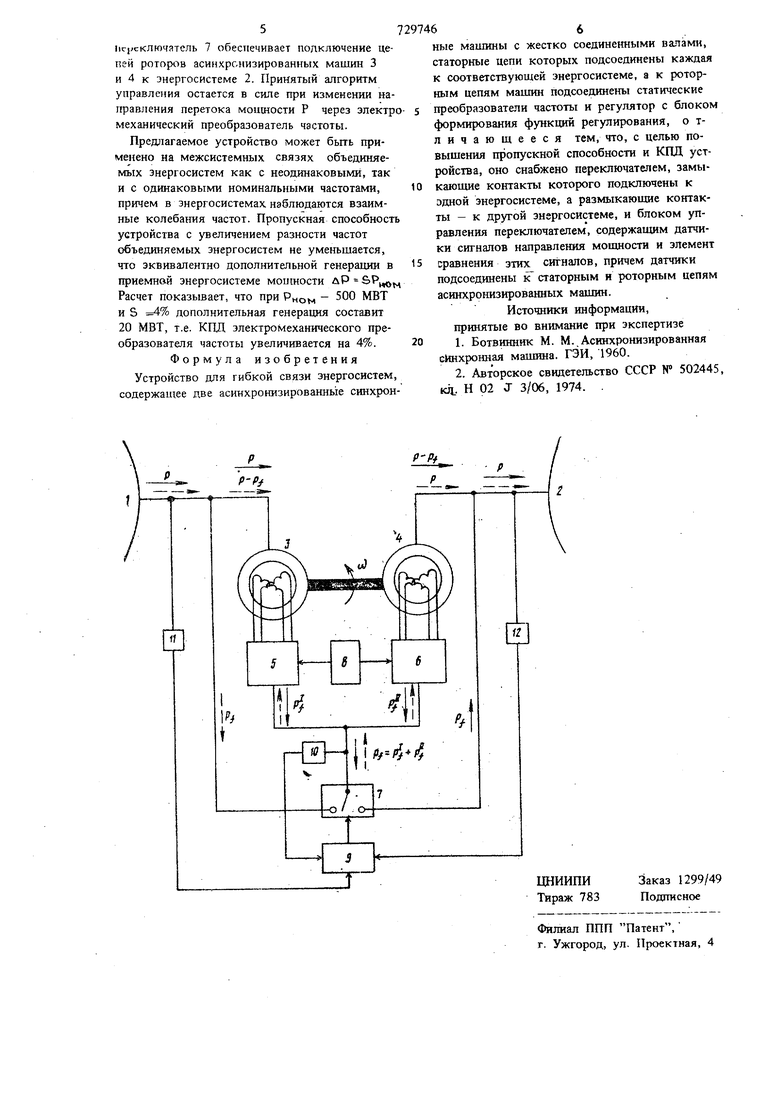
Изобретение относится к передаче электрической энергии по Л1гаиям переменного тока, а именно к электромеханическим преобразователям частоты для гибкой связи энергосистем с различающимися частотами. Известны устройства для связи электроэнергетических систем, выполненные на базе двух асршхрониэированных синхронных машин с жестко соединенными валами, статорные цепи которых подключаются раздельно к энергосистемам. Для питания роторных цепей асинхр низированных синхронных машин в известном устройстве применяется расположенная на общем валу коллекторная маишкз или статический преобразователь частоты с соответствуто ищм регулятором 1. Однако наличие потребителей мощности для питания роторных цепей снижает пропускную способность и КПД устройства связи. Наиболее близким по технической сущности к изобретению является устройство для объединения энергосистем, содержащее две ассинхронизированные синхронные мащины с жестк соединенными валами, статорные цепи которых подсоединены каждая к соответствующей энергосистеме, а к роторным цепям машин подсоединены статические преобразователи частоты и регулятор с блоком формирования функций регулирования 2J. При таком выполнении устройства связи в зависимости от соотношения частоты { к i в объединяемых энергосистемах через статический преобразователь частоты обмотками роторов асинхронизированных синхронных ма щин только потребляется или только вьщаетсл активная мощность Р,- где S - скольжение ротора асинхронизнрованной машины относительно частоты энергосистемы, к которой подключены статорные цепи рассматриваемой асинхронизированной машины (при ее работе со скольжением). Пропускная способность известного устройства зависит от активной мощности Р, , вьвдаваемой или потребляемой обмотками роторов асинхронизированных машин электромеханического преобразователя в зависимости от колебаний частоты связываемых энергосистем. При снижении частоты приемной энергосистемы мощность возвращается на шины передающей энерrocHCiervibi и наоборот (при снижении частоты передающей энергосистемы мощность Р возвращается на шины приемной энергосистемы). Таким образом, пропускная способность всего устройства оказывается сниженной на величину Pj , т.е. через электромеханический преобраэоват-ель частоты можно передавать не всю номинальную мощлость, а лишь часть мощности (Р-Р{). В то же время при снижении частоты в приемной энергосистеме, обусловлен ном дефицитом активной мощности в этой энергосистеме, крайне необходимо обеспечить наибольшую возможную пропускную способность устройства - тем в большей мере это необходимо, чем значительнее снижение частоты, т.е. чем больше величина Р. Для повышения пропускной способности и КПД устройства для гибкой связи энергосистем при взаимном скольжении об-ьединяемцх подсистем в известное устройство, содержащее две асинхронизированные синхронные машины с жестко соединенными валами, статорные цегш которых подсоединены каждая к соответ ствующей энергосистеме и статические преоб разов атели частоты в роторных цепях каждой машины, на вход которых поступают сигналы от общего для роторных цепей асинхронизированных машин регулятора с блоком формирования функции регулирования, введен переклю чатель, замыкающие контакты которого подключены к одной энергосистеме, а размыкающие контакть - к другой энергосистеме. Для осуществления п:реключений переключатель снабжен блоком управления, содержащим датчики сигналов направления мощности, подключенные к статорным и роторным цепям асинхронизированных машин, и элемент сравнения этих сигналов. На чертеже дана схема предлагаемого устройства. Устройство для гибкой связи энергосистем и 2 состоит из двух асинхронизированных синхронных машин 3 и 4 с жестко соединенными валами. Цепи роторов асинхронизированных машин 3 и 4 через статические преобразователи частоты 5 и 6 и переключатель 7 сое динены со статорными цепями аскнхронизированных машин т.е. с энергосистемами 1 и 2. На вход статических преобразователей частоты 5 и 6 поступает сигнал от регулятора 8 с бло ком формировашя функции регулирования. К управляемым элементам переключателя 7 подключено, устройство управления переключателем, представляющим собой элемент сравнения 9, на вход которого присоединены датчики 10, 11, 12 сигналов направления мощности в роторных и статорных цепях асинхронизиров.1шых машин 3 и 4. Возможны два положенил переключателя 7, при которых питание роторных асинхронизированных Mauitm 3 и 4 ос51иествляется от сети передающей 1 или приемной 2 энергосистемы. При передаче мощности Р через электромеханический преобразователь частоты из энергосистемы 1 в 2 асинхронизированная машина 3 будет работать в двигательном, а асинхронизированная мапмна 4 - в генераторном режимах. Если частоты I н i в этих энергосистемах находятся в соотношении f.tn, с роторов обеих машин должна Т сниматься моцдность Р Pf + р. . в этом случае переключатель 7 переводится в положение, при котором мощность PJ будет передаваться в энергосистему 2. В результате через статор, работающей генератором асинхронизированиой машины 4, будет передаваться мощность -Р-Р|, а череэ статические преобразова- . тели частоты 5 и 6 - дополнительная мощность Р. (на чертеже направление перетоков активных мощностей для данного случая показано сплошными стрелками); тем самым будет обеспечиваться передача в энергосистему 2полной мощности Р. При соотношении частот J -{2 и сохранении направления перетока мощности Р в цепь ротора вводят обе асинмонизированные машины мощности Pf и Р, . в этом случае действием переключателя 7 система питания возбуждения обеих асинхронизированных машин 3 и 4 подключается к энергосистеме , благодаря чему обеспечивается передача в энергосистему 2 через статор асш хронизироБанкой машинь 4 мошпости Р (на чертеже 1 перетоки мощности в данном случае показаны пунктирными стрелками) . Управление переключателем 7 осуществляется в соответствии с простым алгоритмом при помощи устройства управления переключателем, представляющего собой элемент сравнения 9, на вход которого подаются сигналы () направления мощности в статорных цепях асинхронизированкых машин 3 и 4 от датчиков 11 и 12 и в роторных цепях асинхронизированных машин 3 и 4 от датчика 10. Если принять за положительное направление активных мощностей направлеш-ie их в обмотку статора и ротора асинхронизированпых машин 3 и 4, то при ььшолнении условия: sign Р срабатывает элемент сравнения 9 и действует на переключатель 7, который подключает цепи роторов обеих асинхронизироваштых машин 3и 4 к шинам энергосистемы 1. При выполнении условия: 9)gn 5 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для гибкой связи энергосистем | 1978 |
|
SU705596A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| УСТРОЙСТВО ДЛЯ ГИБКОЙ СВЯЗИ ЭНЕРГОСИСТЕМ | 2004 |
|
RU2273937C1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Устройство для связи двух энергосистем переменного тока | 1980 |
|
SU936210A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1557626A1 |
