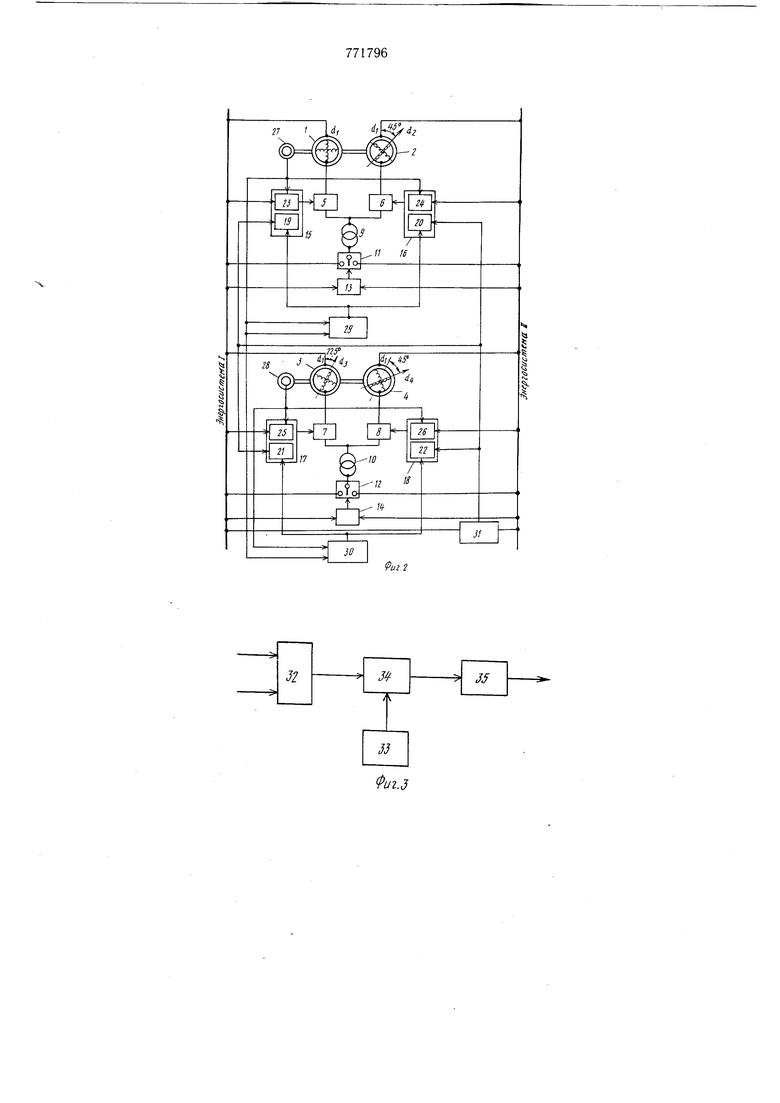
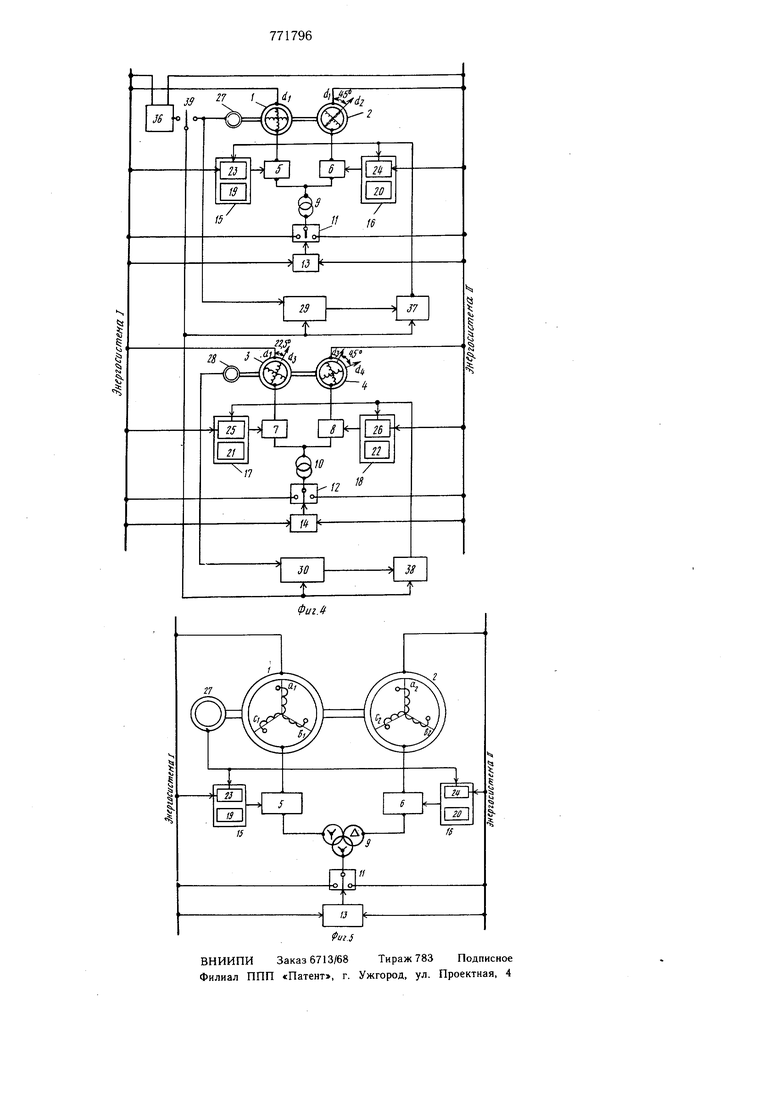
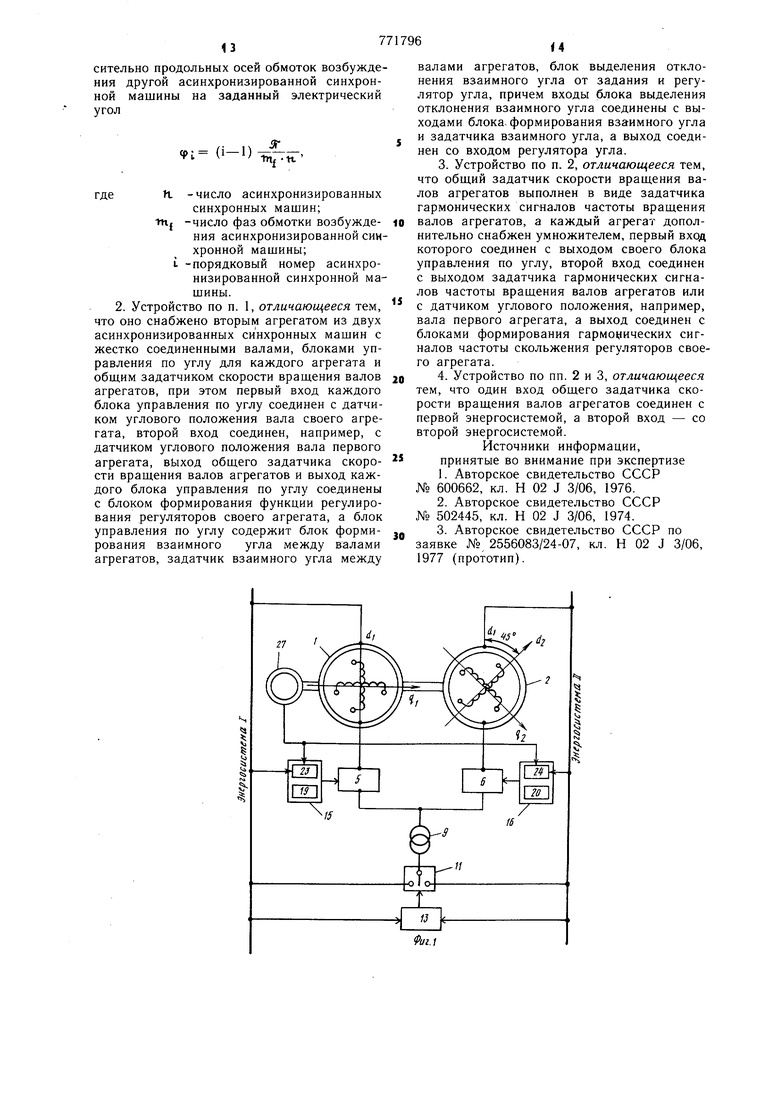
Изобретение относится к электротехнике, более конкретно к устройствам для связи источников переменного тока. При объединении энергосистем в единую систему применяют устройства, представляю щие собой асинхронизированные синхронные электромеханические преобразователи частоты (АС ЭМПЧ). АС ЭМПЧ состоит или из синхронной машины и асинхронизированной синхронной машины с жестко соединенными валами 1, или из двух асинхронизированных синхронных машин с жестко соединенными валами 2. Так как в указанных устройствах тиристорный преобразователь частоты системы возбуждения каждой асинхронизированной синхронной машины подключен к своим статорным обмоткам, то при работе со скольжением это уменьшает полную пропускную способность устройства и ухудшает качество электрической энергии на шинах асинхронизированных синхронных машин, поскольку тиристорный преобразователь частоты является источником субгармонических колебаний реактивной мошности. В известном устройстве для гибкой связи энергосистем, взятом в качестве прототипа, для использования полной пропускной способности устройства входы тиристорных преобразователей частоты систем возбуждения асинхронизированных синхронных машин подключены к одной из объединяемых энергосистем 3. Подключение к той или иной энергосистеме осуш,ествляется на основе сравнения знаков направлений перетоков мощностей в статорных и роторных цепях машин. Недостатком аналогов и устройства - прототипа является ухудшение качества электрической энергии в электросети, к которой подключены входы управляемых преобразователей частоты систем возбуждения асинхронизированных синхронных машин. Известно, что для возбуждения асинхронизированных синхронных машин применяют тиристорные преобразователи частоты с непосредственной связью и естественной коммутацией (так называемые циклоконвертеры). Реактивная мощность, потребляемая циклоконвертером из питающей электросети, модулирована по амплитуде с частотой вторичной сети. В устройстве- прототипе питающей сетью является сеть, к которой подключены статорные обмотки асинхронизированной синхронной машины, а вторичной сетью - ее обмотки возбуждения. Поэтому потребляемая реактивная мощность циклоконвертеpa будет модулирована по амплитуде с частотой скольжения асинхронизированной синхронной мащины. При этом число колебаний значения реактивной мощности за период скольжения асинхронизированной синхронной мащины зависит от числа фаз обмотки возбуждения. Так, за период скольжения двухфазного ротора будет четыре колебаний, трехфазного ротора - шесть колебаний. Глубина колебаний в нормальном режиме тем больше, чем меньще число фаз ротора и скольжение, с которым работает асинхронизированная синхронная машина. При малых скольжениях (S - 0) значения реактивной мощности на входе циклоконвертера соответственно для двух- и трехфазного роторов изменяются в диапазоне Sfm Qn4mi.a), , лц Sftn Qn4(-mj 3) Т Sfm , где Qn4 -реактивная мощность на вхо де циклоконвертера; g ..SSLlft - предельная мощность на i кольцах обмоток возбуждения асинхронизированной синхронной машины (определяется конструкцией мащины); пот - нацбольщее (потолочное) значение напряжения возбуждения; i 4 flif-TOK возбуждения; jvt -коэффициент магнитной связи между обмотками ста тора и ротора; X - индуктивное сопротивление статора машины; 4 - постоянная времени обмотки возбуждения. Так, для асинхронизированной синхронной машины мощностью 250 МВт, рассчитанной на наибольщее скольжение 0,04, имеем: SfM 17,73 МВ.Ар. При этом абсолютные значения колебаний реактивной мощности составляют соответственно для двух- и трехфазного ротора AQn4(tnt.2.) ( ) 7,3 МВ.Ар. ДРпчК--3) (-3- - ;|) SfM - 3,2 МВ-Лр. Но так как к одним и тем же шинам подключены циклоконвертеры обеих асинхронизированных синхронных машин устройства- прототипа, то общее значение колебаний может удвоиться и тогда соответственно составит 14,6 и 6,4 МВ.Ар. А если параллельно работают несколько агрегатов АС ЭМПЧ, то соответственно возрастет и абсолютное значение колебаний реактивной мощности. Это, как указывалось ухудшает качество электроэнергии в цепи источника возбуждения машин устройства. Цель изобретения - улучшение качества электрической энергии в электросети, к которой подключены управляемые преобразователи частоты систем возбуждения асинхронизированных синхронных машин. Для достижения этой цели в известном устройстве, содержащем агрегат из двух асинхронизированных синхронных мащин с жестко соединенными валами, статорные цепи которых подсоединены каждая к соответствующей энергосистеме, а к роторным цепям мащин подсоединены статические преобразователи частоты, датчик углового положения вала агрегата, регуляторы, каждый из которых содержит блок формирования функции регулирования и блок формирования гармонического сигнала частоты скольжения машины, причем первый вход блока формирования гармонического сигнала частоты скольжения соединен с датчиком углового положения вала своего агрегата, а второй вход соединен со сво.ей энергосистемой, переключатель входов статических преобразователей частоты, первые контакты которого подключены к одной энергосистеме, а вторые контакты - к другой энергосистеме, и блок управления переключателем, согласно изобретению, продольные оси обмоток возбуждения одной асинхронизированной синхронной машины смещены относительно продольных осей обмоток возбуждения другой асинхронизированной машины на электрический угол s;,где п. -число асинхронизированных синхронных машин; т -число фаз обмотки возбуждения асинхронизированной синхронной мащины; I -порядковый номер асинхронизированной синхронной машины. При использовании агрегатов из двух асинхронизированных синхронных машинс жестко соединенными валами, устройство дополнительно содержит блоки управления по углу для каждого агрегата и общий задатчик скорости вращения валов агрегатов, при этом первый вход каждого блока управления по углу соединен с датчиком углового положения вала своего агрегата, второй вход соединен, например, с датчиком углового положения вала первого агрегата, выход общего задатчика скорости вращения валов агрегатов и выход каждого блока управления по углу соединены с блоком формирования функции регулирования регуляторов своего агрегата, а блок управления по углу содержит блок формирования взаимного угла между валами агрегатов, задатчик взаимного угла между валами агрегатов, блок выделения отклонения взаимного угла от задания и регулятор угла, причем входы блока выделения отклонения взаимного угла соединены с выходами блока формирования взаимного угла и задатчика взаимного угла, а выход соединен со входом регулятора угла. Общий задатчик скорости вращения валов агрегатов выполнен как задатчик гармонических сигналов частоты вращения валов агрегатов, а каждый агрегат дополнительно снабжен умножителем, первый вход которого соединен с выходом своего блока управления по углу, второй вход соединен с выходом задатчика гармонических сигналов частоты вращения валов агрегатов или с датчиком углового положения, например, вала первого агрегата, а выход соединен с блоком формирования гармонических сигналов частоты скольжения регуляторов своего агрегата. Один вход общего задатчика скорости вращения валов агрегатов соединен с первой энергосистемой, а второй вход - со второй энергосистемой. Схемы предлагаемого устройства .проиллюстрированы фиг. 1-5, где приняты следующие обозначения: 1-4 - асинхронизированные синхронные мащины; 5-8 - статические преобразователи частоты; 9 и 10 трансформаторы; 11 и 12 - переключатели входов статических преобразователей частоты; 13 и 14 - блоки управления переключателем; 15-18 - регуляторы,- 19-22 - блоки формирования функции регулирования; 23-26 - блоки формирования гармонического сигнала; 27 и 28 - датчики углового положения вала агрегата; 29 и 30 - блоки управления по углу; 31 - задатчик скорости вращения валов агрегатов; 32 - блок формирования взаимного угла между валами агрегатов; 33 - задатчик взаимного угла между валами агрегатов; 34 - блок выделения oтклoнjeния взаимного угла от залакия, 35 - регулятор взаимного угла; 36 - задатчик гармонических сигналов частоты вращения вала агрегата; 37 и 38 - умножители; 39 - переключатель. На фиг. 1 показана схема устройства для связи двух энергосистем, содержащего две асинхронизированные синхронные мащины 1 и 2 с жестко соединенными валами и двухфазными обмотками возбуждения на ротоpax. Обмотки возбуждения мащин подключены к управляемым преобразователям частоты 5 и 6, входы которых соединены с трансформатором 9. Трансформатор 9 с ПОМОЩЬЮ переключателя 11 подключается к одной из объединяемых энергосистем. Управление переключателей 11 входов статических преобразователей частоты 5 и 6 осуществляется блоком 13 управления. Регуляторы 15 и 16 содержат соответственно блоки 19 и 20 формирования функции регулирования и блоки 23 и 24 формирования гармонических сигналов частоты скольжения мащян агрегата. Первые входы блоков 23 и 24 формирования гармонических сигналов частоты скольжения соединены с датчиком 27 углового положения вала агрегата, а вторые входы соответственно - с энергосистемой 1 и энергосистемой И. Регуляторы 15 и 16 соединены соответственно со статическими преобразователями -частоты 5 и 6. Питание управляемых преобразователей частоты 5 и 6 осуществляется через общий трансформатор 9 и переключатель , 11. Но каждый управляемый преобразователь частоты может быть снабжен своим трансформатором и переключателем. Сигнал частот энергосистем I, II и датчика 27 углового положения вала агрегата устройства поступают в блоки 23 и 24 формирования гармонических сигналов частоты скольжения соответственно регуляторов 15 и 16. Блоки 19 и 20 формирования функции регулирования регуляторов 15 и 16 формируют сигналы управления, обеспечивающие устойчивость работы и поддержание требуемого режима мащин. Эти сигналы управления на частоте сколожения с выхода регуляторов 15 и 16 поступают соответственно в статические преобразователи частоты 5 и 6, обеспечивая надежное объединение энергосистем. При этом для использования полной пропускной способности устройства входы статических преобразователей частоты 5 и 6 систем возб.уждения асин-. хронизированных синхронных мащин 1 и 2 подключены с помощью переключателя 11 к одной из объединяемых энергосистем. Подключение к той или иной энергосистеме осуществляется на основе взаимного сравнения знаков направления перетоков мощностей в статорных и роторных цепях 5ащин 1 и 2 или на основе взаимного сравнения частот энергосисте.м I, И в блоке управления переключателем. Предлагаемое устройство его работа в целом аналогичны устройству-прототипу и его работе. Отличие, как показано на фиг. 1, заключается в том, что в предлагаемом устройстве продольные оси обмоток возбуждения мащин смещены в пространстве на определенный угол. Обмотки возбуждения мащин выполнены двухфазными, при этом продольные оси обмоток возбуждения машин 1 и 2 сдвинуты в пространстве на 45 эл.град. (угол между осями di и dj). Так как оба преобразователя частоты питаются от одного источника возбуждения, то при двухфазных обмотках возбуждения Машин за период скольжения их суммарная реактивная мощность будет иметь восемь колебаний в диапазоне значений : 2,42 St QnoHirj ) $2,62 S. По абсолютной величине это составляет: АРпц() (2,62-942); Siw 3,55МВ.Ар. Из сравнения значений реактивных мощностей АРпч2.() и (,„.)следует, что при выполнении устройства для связи двух энергосистем по изобретению глубина колебаний реактивной мощности снижает ся в два раза по отношению к глубине колебаний устройства с одной асинхронизированной синхронной машины, и в 4 раза по сравнению с глубиной колебаний устройства - прототипа. При выполнении обмоток возбуждения машин трехфазными (при этом угол сдвига между продольными осями обмоток возбуждения машин составляет 30 эл. град.) число колебаний суммарной реактивной мощности на входах статических преобразователей частоты 3 и 4 за период скольжения удвоится (будет равно 12), а глубина колебаний также уменьшится в два раза по сравнению с глубиной колебания устройства с одной асинхронизированной синхронной машиной и составит для нашего примера 1,6 МБ.Ар и в 4 раза по сравнению с глубиной колебания устройства - прототипа Как видим, снижение г лубины колебании суммарной реактивной мощности на входах статических преобразователей частоты в предлагаемом устройстве для связи двух энергосистем улучщает качество электрической энергии в энергосистеме, к которой подключены с помощью переключателя 11 статические преобразователи частоты 5 и 6. На фиг. 2 показано устройство для связи двух энергосистем, когда параллельно включены два агрегата, каждый из которых состоит из двух асинхронизированных синхронных машин с жестко соединенными валами. Все элементы первого агрегата и связи между ними и элементы второго агрегата и связи между ними идентичны элементам и связям, показанным на фиг. 1. Но в устройстве по фиг. 2 каждый агрегат дополнительно снабжен блоком управления по углу (соответственно блоки 29 и 30).Кроме того, агрегаты имеют общий задатчик 31 скорости вращения валов агрегатов. Первые входы блоков 29 и 30 управления по углу соединены соответственно с датчиками 27 и 28 углового положения агрегата. Вторые входы блоков 29 и 30 управле76а ния по углу соединены с датчиком 27 углового положения первого агрегата (см. фиг З) или с датчиком 28 углового положения вала второго агрегата. Если устройство содержит более двух параллельно включенных агрегатов, то вторые входы их блоков управления по углу могут быть соединены с датчиком углового положения вала любого из агрегатов. Выход блока 29 управления по углу первого агрегата соединен с первыми входами блоков 19 и 20 формирования функции регулирования соответственно регуляторов 15 и 16. Выход блока 30 управления по углу второго агрегата соединен с первыми входами блоков 21 и 22 формирования функции регулирования регуляторов 17 и 18. Вторые входы блоков 19-22 формирования функции регулирования всех асинхронизированных синхронных машин соединены с общим для всех агрегатов задатчиком 31 скорости вращения валов агрегатов. Входы задатчика 31 скорости вращения валов агрегатов соединены с энергосистемами I и II (при ручном управлении задатчиком 31 этих соединений нет). При этом блок 29 (30) управления по углу каждого агрегата (см. фиг. 3) содержит блок 32 формирования взаимного угла между валами агрегатов, входы которого соединены с датчиками углового положения соответствующих агрегатов, задатчик 33 взаимного угла между валами агрегатов, блок 34 выделения отклонения взаимного угла между валами агрегатов от задания, входы которого соединены с выходами блока 32 и задатчика 33, и регулятор 35 угла, вход которого соединен с выходом блока 34. Как показано на фиг. 2, продольные оси обмоток возбуждения асинхронизированных синхронных мащин 1 и 2 первого агрегата сдвинуты на 45 эл. град, (угол между осями d-, и d2). На такой же угол сдвинуты продольные оси обмоток возбуждения асинхронизированных синхронных мащин 3 и 4 (угол между осями da и d). Так как элементы агрегатов по фиг. 2 идентичны элементам устройства по фиг. 1, то как работа, так и снижение уровня колебаний реактивной мощности на входах статических преобразователей частоты каждого агрегата аналогичны. Но устройство по фиг. 2 позволяет по сравнению с устройствами по фиг. 1 снизить еще в два раза уровень колебаний суммарной реактивной мощности на входах статических преобразователей частоты 5-8 обоих агрегатов. Осуществляется это следующим образом. Сигналы от датчиков 27 и 28 углового положения валов первого и второго агрегатов поступают в блок 30 управления по углу второго агрегата. Здесь блок 32 формирует сигнал взаимного угла между валами агрегатов, а задатчиком 33 задано значение этого угла. По сигналам блоков 32 и 33 в блоке 34 выделяется отклонение значения взаимного угла между валами агрегатов от заданного, а регулятор 35 взаимного угла формирует по этому отклонению соответствующий сигнал управления, который подается в блоки 21 и 22 формирования функции регулирования регуляторов 17 и 18 машин второго агрегата. Величина взаимного угла, задаваемого задатчиком 33, составляет при двухфазных обмотках возбуждения асинхронизированных синхронных машин и двух параллельно включенных агрегатах 22,5 эл. град, (на фиг. 2 - угол между осями d( и da). Для машин с трехфазными обмотками возбуждения этот угол составляет 15 эл. град. Если число агрегатов больше двух, то угол соответственно будет меньше. Для блока 29 управления по углу первого агрегата угол задания равен нулю, так как на его входы подаются лишь сигналы от своего датчика 27 углового положения. Сигнал от общего задатчика 31 скорости вращения валов агрегатов постушет в блоки 19-22 формирования функции регулирования обоих агрегатов и обеспечивает вращение валов обоих агрегатов с одинаковой скоростью, а сигналы от блока 30 управления по углу, поступающие в блоки 21, 22 формирования функции регулирования второго агрегата, обеспечивают при этом поворот вала второго агрегата по отношению к валу первого агрегата на заданный угол. В показанном на фиг. 2 устройстве этот угол равен 22,5 эл. град. При этом глубина колебаний суммарной реактивной мощности на входах статических преобразователей частоты 5-8 предлагаемого устройства ниже в два раза, чем в устройстве на фиг. 1. При работе для агрегатов безразлично, между осями каких обмоток возбуждения машин 1 и 3 первого и второго агрегатов устройства по фиг. 2 устанавливается указанный угол ()1. Поэтому в блоках 29 и 30 управления по углу могут быть установлены периодизаторы, которые должны быть включены между блоками 32 и 34 (см. фиг. 3). При этом угол периодизации равен углу ф взаимного угла между валами агрегатов. На фиг. 4 показан вариант устройства для связи двух энергосистем, когда параллельно включены два агрегата. В отличие от устройства по фиг. 2 устройство по фиг. 4 снабжено задатчиком 36 гармонических сигналов частоты вращения валов агрегатов, один вход которого соединен с первой энергосистемой, а второй вход - со второй энергосистемой, первый агрегат снабжен умножителем 37, первый вход которого соединен с выходом блока 29 управления по углу, а выход соединен с блоками 23 и 24 формирования гармонических сигналов частоты скольжения соответственно регуляторов 15 и 16. Второй агрегат снабжен умножителем 38, первый вход которого соединен с выхоДОМ блока 30 управления по углу, а выход соединен с блоками 25 и 26 формирования гармонических сигналов частоты скольжения соответственно регуляторов 17 и 18, При этом вторые входы умножителей 37 и 38 и блоков 29 и 30 управления по углу подключены с помощью переключателя 39 или к датчику 27 углового положения зала первого агрегата (или любого из параллельно включенных агрегатов), или к задатчику 36 гармонических сигналов частоты вращения валов агрегатов. По эффекту снижения глубины колебаний суммарной реактивной мощности статических преобразователей частоты 5-8 устройства по фиг. 2 и 4 идентичны. Различие заключается в том, что поддержание взаимного угла ф между валами параллельно включенных агрегатов в устройстве по фиг. 2 осуществляется на постоянном токе, а в устройстве по фиг. 4 - на переменном токе. Так же, как и в устройстве по фиг. 2, в блоке 29 управления по углу первого агрегата задатчиком 33 взаимного угла между валами агрегатов устанавливается нулевой угол, а в блоке 30 управления по углу второго агрегата задатчиком 33 взаимного угла между валами устанавливается требуемый угол, равный в нашем случае 22,5 эл. град, (устройство реализует поворот вала второго агрегата по отношению к валу первого агрегата) . Рассмотрим работу устройства по фиг. 4, ко.гда переключатель 39 переключен на вход датчика 27 углового положения вала первого агрегата. При этом на оба входа блока 29 управления по углу поступают одинаковые гармонические сигналы от датчика 27 углового положения вала первого агрегата. Так как в блоке 29 управления по углу при этом задатчиком 33 задано нулевое значение угла ф;, то на выходе блока 29 сигнал будет нулевым, поэтому аргумент гармонического сигнала датчика 27 углового положения вала первого агрегата, поступающего на второй вход умножителя 37, без изменения поступает с его выхода на первые входы блоков 23 и 24 формирования гармонических сигналов частоты скольжения регуляторов 15 и 16. При этом агрегат работает так же, как агрегат устройства по фиг. 1 и первый агрегат устройства по фиг. 2. На первьш вход блока 30 управления по углу поступает гармонический сигнал от датчика 28 углового положения вала своего (второго) агрегата, на второй вход блока 30гармонический сигнал отдатчика 27 углового положения первого агрегата. Так как в блоке 30 управления по углу при этом задатчиком 33 задано значение взаимного угла, равное 22,5 эл. град., то на выходе блоке 30 будет получен сигнал, пропорциональный этому углу ф;. , и аргумент гармонического сигнала датчика 27 углового положения вала первого агрегата, поступающего на второй вход умножителя 38, будет изменен в умножителе 38 на соответствующий угол Ф1.. На выходе умножителя получим гармонические сигналы с аргументом (Ti ), где У -- аргумент гармонического сигнала датчика 14 углового положения вала первого агрегата, поступающие далее на первые входы блоков 25 и 26 формирования гармонических сигналов частоты скольжения регуляторов 17 и 18, обеспечивая тем самым дополнительный поворот вала второго агрегата по отношению к валу первого агрегата на требуемый угол (в нащем случае 22,5эл. град.). Так как в устройстве по фиг. 4 датчик 27 углового положения вала первого агрегата является общим задатчиком гармонических сигналов частоты вращения валов для всех остальных параллельно включенных агрегатов, то они все будут жестко следовать за первым агрегатом, сохраняя при этом заданный взаимный поворот валов. Когда переключатель 39 переключен на выход общего задатчика 36 гармонических сигналов частоты вращения валов агрегатов, работа устройства аналогична описанной. Отличие в том, что при этом все агрегаты будут жестко следовать по скорости вращения валов агрегатов за задатчиком 36, частота гармонических сигналов на выходе которого зависит в нащем случае от частоты объединяемых энергосистем. При ручном управлении задатчиком 36 его входы соединять с энергосистемами I и И нет необходимости. На фиг. 5 показано устройство для связи двух энергосистем, когда агрегат содержит две асинхронизированные синхронные мащины с жестко соединенными валами, причем все элементы схемы по фиг. 5 и связи между ними в основном идентичны схеме по фиг. 1. Отличие заключается в том, что асинхронизированные синхронные мащины 1 и 2 выполнены с трехфазными обмотками возбуждения и при этом продольные оси обмоток возбуждения совпадают в пространстве. На фиг. 5 показано, что фаза di машины 1 совпадает с фазой А машины 2; но фаза а может совпадать с фазой Ьг или СгКроме того, трансформатор 9 выполнен трехобмоточным со схемой соединения обмоток Y/Y /А-12-11. При этом вторичная обмотка трансформатора, соединенная в звез ду, подсоединена к одному из статических преобразователей частоты, а обмотка, соединенная в треугольник - к другому. Благодаря наличию трехфазных обмоток возбуждения машин и трехобмоточного трансформатора с разными группами соединения вторичных обмоток удается реализовать электрическое взаимное смещение по фазе колебаний реактивных мощностей статических преобразователей частоты 5 и 6 на угол «pj,, равный в данном случае 30 эл. град, что позволяет снизить колебания суммарной реактивной мощности на входах статических преобразователей частоты 5 и 6 так же, как и в устройстве по фиг. 1. Если в устройстве по фиг. 5 статические преобразователи частоты снабдить своими вухобмоточными трансформаторами, то нао их вторичные обмотки соединить в разные группы (Y/Y- 12 и Y/Д), и эффект будет тем же, что и в устройстве по фиг. 1. Если параллельно работают несколько агрегатов по фиг. 5, то к ним нужны те же дополнительные элементы и связи между ними, что и в устройствах на фиг. 2-4. Изобретение может быть применено как для объединения двух энергосисте.м с разными номинальными частотами, так и для объединения энергосистем с одинаковыми номинальными частотами, но имеющих взаимные колебания частот. При этом качество электрической энергии в электросети, к которой подключены входы управляемых преобразователей частот систем возбуждения асинхронизированных синхронных мащин, тем лучше, чем больше общее число параллельно включенных тиристорных преобразователей частоты. Устройство может быть применено и для улучшения качества электрической энергии в электросети, к которой подключены статические преобразователи частоты параллельно включенных асинхронизированных синхронных генераторов, компенсаторов, двигателей. Формула изобретения 1. Устройство для связи двух энергосистем, содержащее агрегат из двух асинхронизированных синхронных мащин с жестко соединенными валами, статорные цепи которых подсоединены каждая к соответствующей энергосистеме, а к роторным цепям машин подсоединены статические преобразователи частоты, датчик углового положения вала агрегата, регуляторы, каждый из которых содержит блок формирования функции регулирования и блок формирования гармонического сигнала частоты скольжения машины, причем первый вход блока формирования гармонического сигнала частоты скольжения соединен с датчиком углового положения вала своего агрегата, а второй вход соединен со своей энергосистемой, переключатель входов статических преобразователей частоты, первый контакты которого подключены к одной энергосистеме, а вторые контакты - к другой энергосистеме, и блок управления переключателем, отличающееся тем, что, с целью улучшения качества электрической энергии в энергосистеме, к которой подключены с помощью переключателя входы указанных статических преобразователей частоты, продольные оси обмоток возбуждения одной асинхронизированной синхронной машины смещены относительно продольных осей обмоток возбуждения другой асинхронизированной синхронной машины на заданный электрический угол
cp-O-Dlfrn
гдеН. -число асинхронизированных
синхронных машин; -число фаз обмотки возбужде-m
i ния асинхронизированнойсинхронной машины; L -порядковый номер асинхронизированной синхронной машины.
2. Устройство по п. 1, отличающееся тем, что оно снабжено вторым агрегатом из двух асинхронизированных синхронных машин с жестко соединенными валами, блоками управления по углу для каждого агрегата и обшим задатчиком скорости вращения валов агрегатов, при этом первый вход каждого блока управления по углу соединен с датчиком углового положения вала своего агрегата, второй вход соединен, например, с датчиком углового положения вала первого агрегата, выход обш,его задатчнка скорости врашения валов агрегатов и выход каждого блока управления по углу соединены с блоком формирования функции регулирования регуляторов своего агрегата, а блок управления по углу содержит блок формирования взаимного угла между валами агрегатов, задатчик взаимного угла между
валами агрегатов, блок выделения отклонения взаимного угла от задания и регулятор угла, причем входы блока выделения отклонения взаимного угла соединены с выходами блока, формирования взаимного угла и задатчика взаимного угла, а выход соединен со входом регулятора угла.
3.Устройство по п. 2, отличающееся тем, что обший задатчик скорости враш.ения валов агрегатов выполнен в виде задатчика гармонических сигналов частоты вращения валов агрегатов, а каждый агрегат дополнительно снабжен умножителем, первый вход которого соединен с выходом своего блока управления по углу, второй вход соединен с выходом задатчика гармонических сигналов частоты враш,ения валов агрегатов или с датчиком углового положения, например, вала первого агрегата, а выход соединен с блоками формирования гармонических сигналов частоты скольжения регуляторов своего агрегата.
4.Устройство по пп. 2 и 3, отличающееся тем, что один вход общего задатчика скорости вращения валов агрегатов соединен с первой энергосистемой, а второй вход - со второй энергосистемой.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 600662, кл. Н 02 J 3/06, 1976.
2.Авторское свидетельство СССР № 502445, кл. Н 02 J 3/06, 1974.
3.Авторское свидетельство СССР по заявке № 2556083/24-07, кл. Н 02 J 3/06, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1982 |
|
SU1046839A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1598043A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |