Изобретение относится к электротехнике, в частности к передаче электрической энергии по линиям переменного тока, конкретно к электромеханическим преобразователям часто.ты для гибкой связи энергосистем с различающимися частотами. Известно устройство, содержащее в системе управления две асинхронизи рованные синхронные машины с жестко соединенными валами, управляемые преобразователи частоты и регуляторы возбуждения, на вход которых поступают сигналы от измерителя скорости вращения вала, от датчиков частоты и напряжения на шинах связываемых энергосистем и от датчика активной мощности межсистемной связи. На-выходе каждого регулятора возбуждения .формируется сигнал с частотой скольжения ротора, подаваемый на вход схемы управления тиристорами управляемого преобразователя частоты. Соответствующим управлением амплитудой и фазой изменяющегося по гармоническому закону напряжения возбуждения и компенсацией электромагнитной инерционности ротора осуществляется связь энергосистем с различающимися параметрами режима. При этом частота напряжения возбуждения каждой из асинхронизированных машин под держивается равной разности частот статоров каждой машины и частоты вра щения вала Ij . . Недостатком известного устройства является возможность нарушения динамической устойчивости устройства для связи энергосистем, а следовательно, и всего энергообъединения, так как в системе управления асинхронизированных синхронных машин уст ройства используются параметры режима, не обеспечиваюпще в достаточной степени управление протекающей через устройство активной мощностью и быст рое демпфирование качаний в связываемых энергосистемах. Наиболее близким к предлагаемому является устройство для связи двух энергосистем, содержащее две асинхронизированные синхронные машины с жестко соединенными валами, статор ныe обмотки которых подключены к соответствующим энергосистемам, управляемые преобразователи частоты, измеритель скорости вращения вала, дат чики частоты и напряжения на шинах связываемых энергосистем, датчик активной мощности межсистемной связи и регуляторы возбуждения, входы одного из которых подсоединены к датчикам частоты и напряжения, к измерителю скорости вращения вала и к датчику активной мощности, входы другого подсоединены к датчикам частоты и напряжения и к измерителю скорости вращения вала, а выход регуляторов возбз ждения подсоединен к управляемому преобразователю частоты каждой из машин. К датчику активной мощности подключены также входы интегрирующего и дифференцирующего элементов, выходы которых подсоединены к входу регулятора первой по направлению перетока .мощности асинхронизированной машины (АСМ), а на вход регулятора возбуждения второй по направлению перетока мощности АСМ подсоединены суммируюш 1й, интегрирующий, дифференцирующий элементы, при этом входы суммирующего элемента подключены к датчикам частоты энергосистем и к измерителю скорости вращения вала, а выходы подсоединены к входам второго.дифференцирующего и суммирующего элементов. На входы регуляторов возбуждения каждой АСМ могут быть подключены дополнительные интегрирующие и дифференцируннцие элементы, входы которых, подсоединены к датчикам напряжения на шинах энергосистем 2 . Недостатком данного устройства является то, что при больших возмущениях, например при длительных коротких замыканиях или отключениях линий или при автоматическом повторном включении в энергосистеме, к ко-, торой подсоединена асинхронизированная синхронная машина с управлением по скорости вращения вала, устройство для связи энергосистем теряет устойчивость, так как другая машина управляется по активной мощности, а за указанное время скольжение машин агрегата успевает возрасти сверх номинального наибольшего значения. Цель изобретения - повышение ус- тойчивости устройства. Поставленная цель достигается тем, что устройство для связи двух энергосистем, содержащее две электрические машины, по крайней мере одна из которых асинхронизированная синхронная, статорные обмотки которой подключены к соответствующей энергосистеме, а роторные обмотки через управляемый преобразователь частоты подключены к выходу регулйтора, входы которого соединены с выходами датчика углового положения и скорости вращения вала и датчика частоты энергосистемы, по крайней мере одного суммирующего и по крайней мере одного интегрирзгющего элементов, при этом вход интегрирующего элемента соединен с выходом соответствзтощего суммирзгющего элемента, вход которого соединен с соответствующим датчиком регулируемого параметра, снабжено по крайней мере одним блоком управления, при этом по крайней мере один интегрирующий элемент выполнен с вторым входом, соединенным с выходом блока управления вход которого соединен с выходом соответствующего суммирующего элеме та, причем блок управления содержит два задатчика уровня скольжения, два сумматора, два диода и один усилитель, при этом вход блока упра ления соединен с первыми входами первого и второго сумматоров, вторы входы которых соединены с задатчика ми уровня скольжения, а выходы чере диоды соединены с входами усилителя выход которого соединен с выходом блока управления. При двух асинхронизированных син хронных машинах выход блока управле- 35
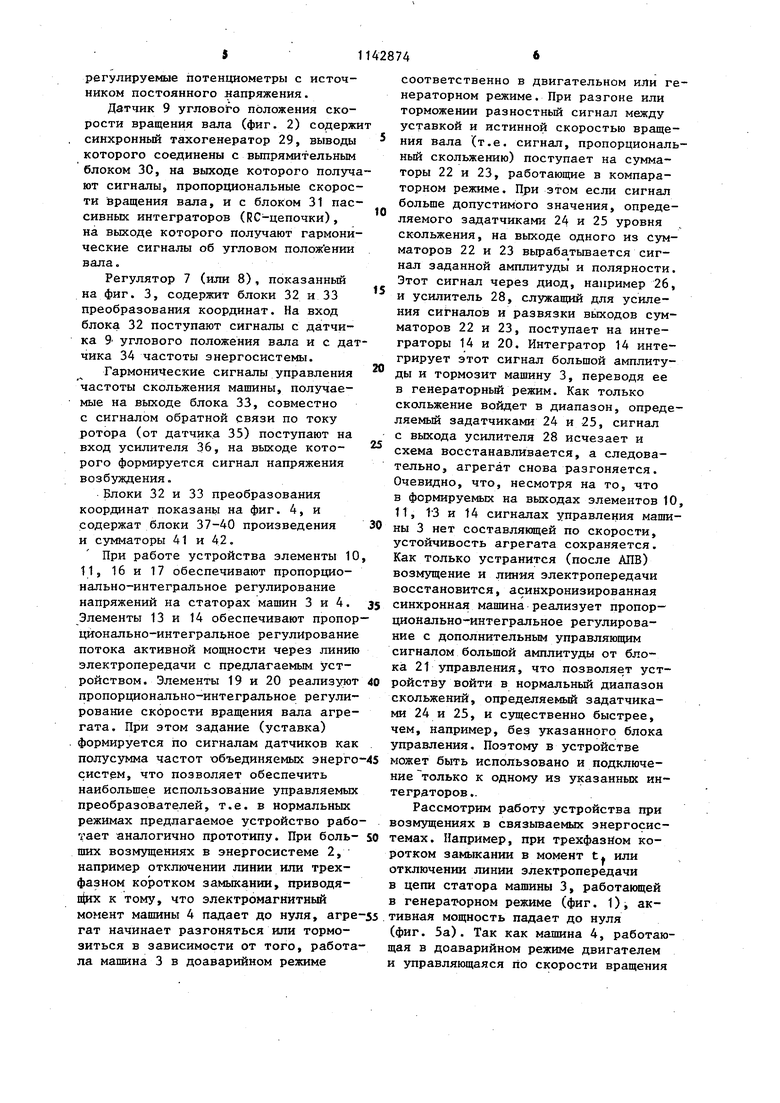
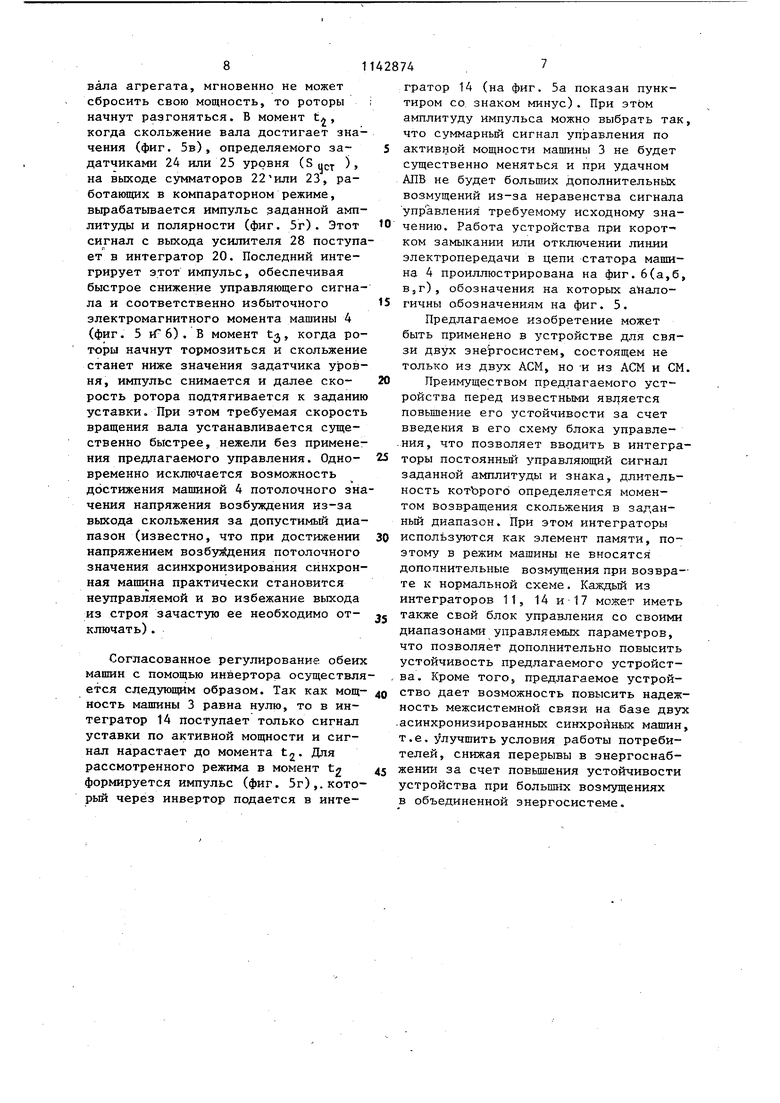
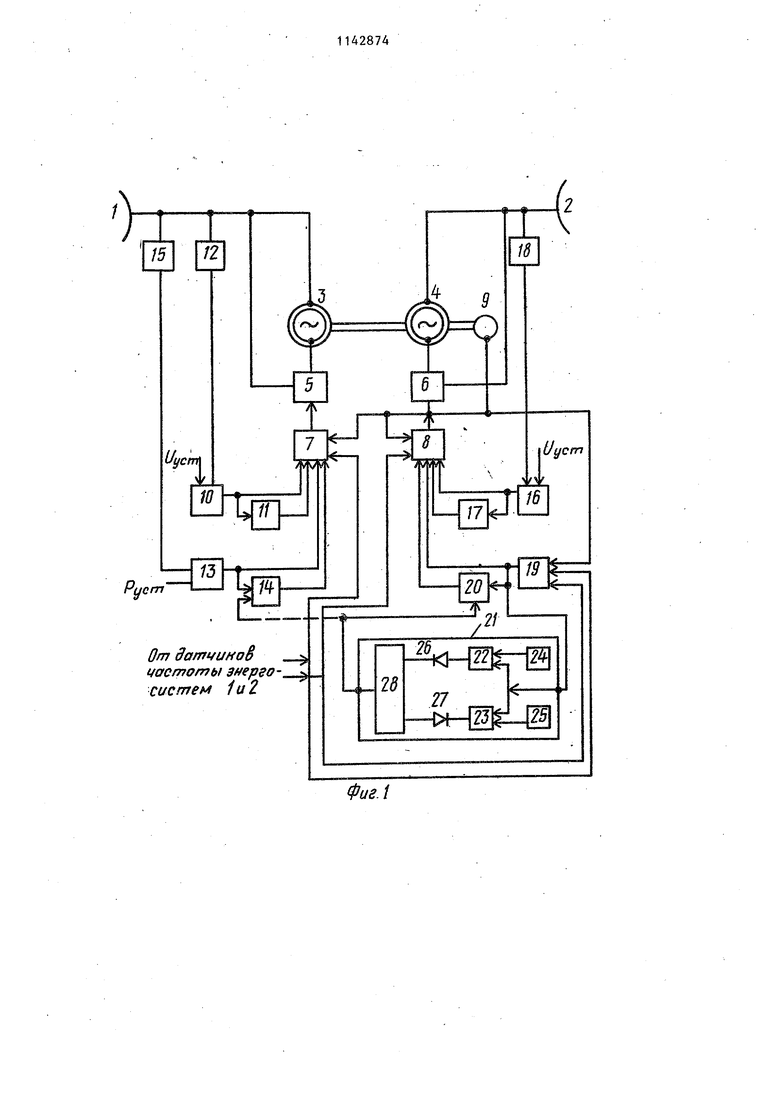
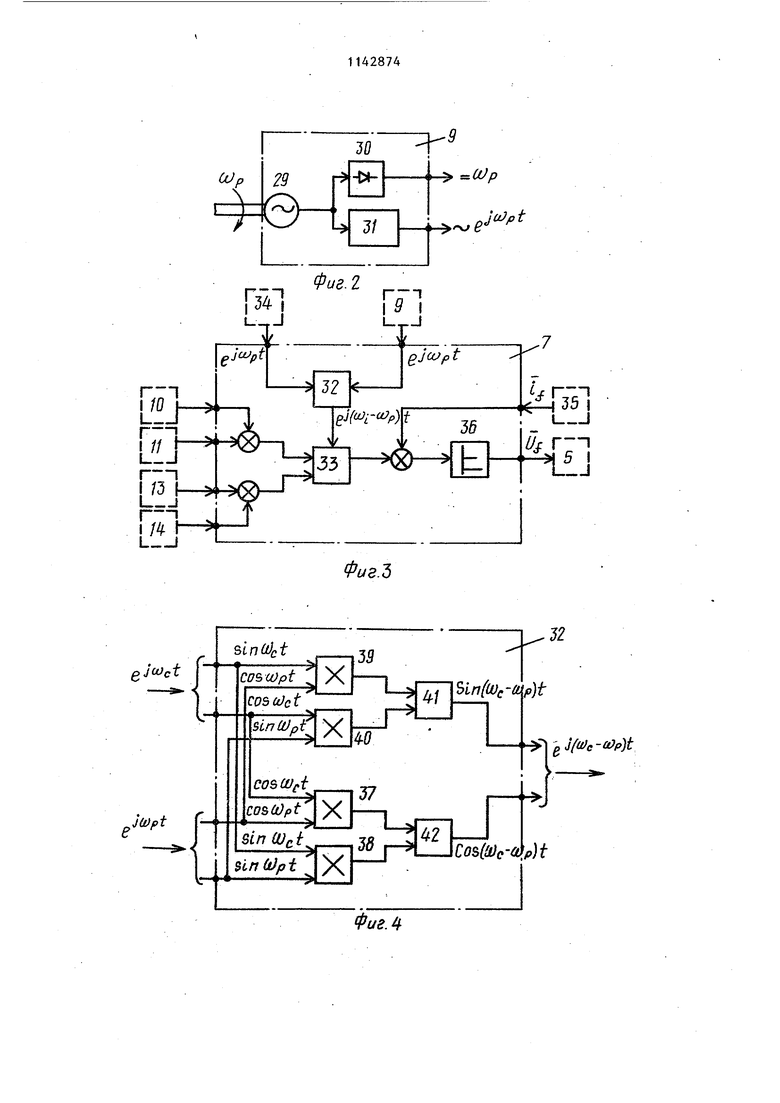
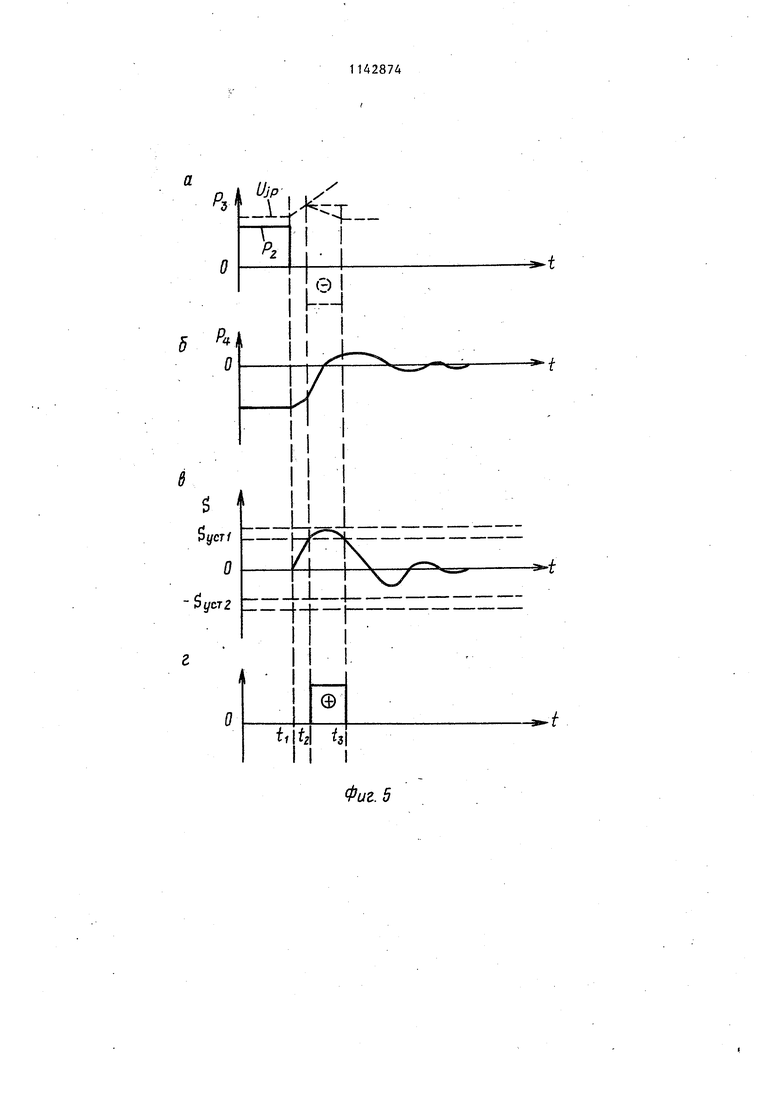
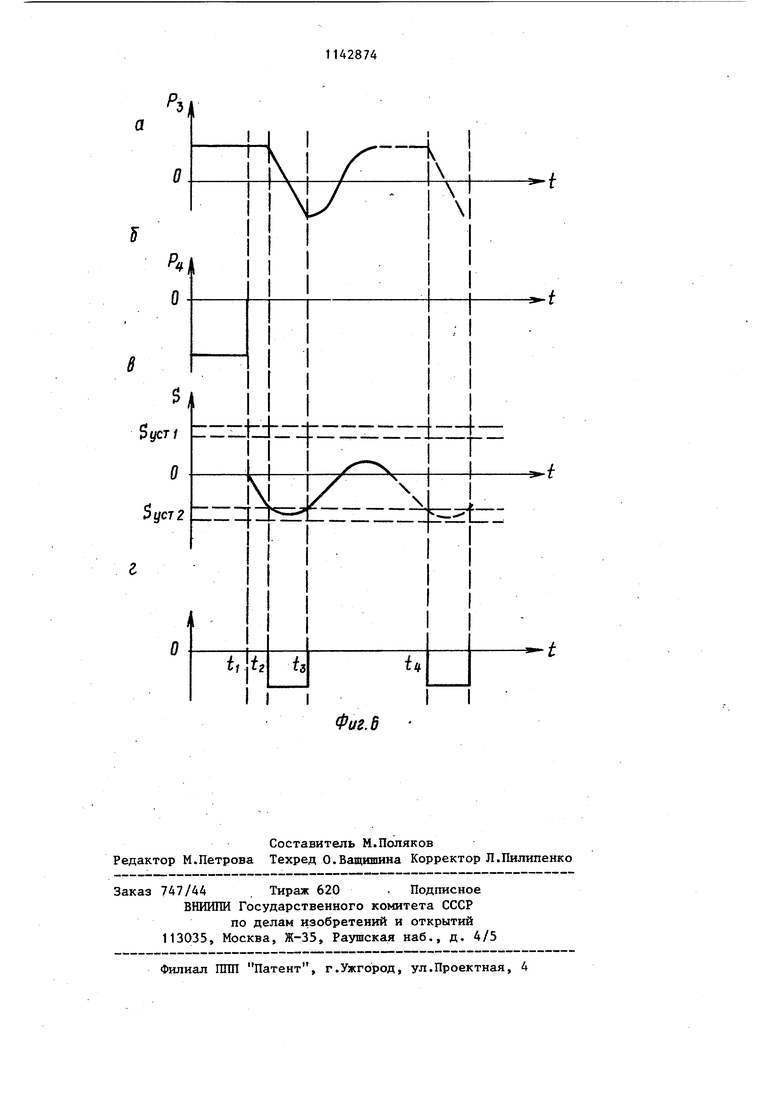
ния соединен с вторыми входами двух указанных интегрирующих элементов, причем с одним интегрирующим элементом - через инвертор. На фиг 1 представлена схема пред-40 лагаемого устройства; на фиг. 2 схема датчика углового положения и скорости вращения вала; на .фиг. 3 схема регулятора; на фиг. 4 - схема преобразователя координат; на фиг. 5(а, б, в, г) и 6(а, б, в, г) рременные характеристики работы устройства при возмущениях в каждой из связываемых энергосистем. Устройство для связи двух энергосистем 1 и 2 состоит из двух асинхронизированных синхронных машин 3 и 4 сжестко соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, а роторные обмотки через управляемые преобразователи 5 и 6 частоты подклю чены соответственно к выходам регууправления соединен с выходом суммирующего элемента 19, а выход соединен с вторым входом интегрирующего элемента 20 или с вторым входом интеляторов 7 и 8, входы которых соединены с выходами датчика 9 углового положения и скорости вращения вала, датчика частоты своей энергосистемы. Кроме того, входы регулятора 7 соединены с выходами первого суммирующего элемента 10 и первого интегрирующего элемента 11, вход которого соединен с выходом первого суммирую- , щего элемента 10, а вход последнего соединен с датчиком 12 напряжения энергосистемы 1. Последующие входы регулятора соединены соответственно с. выходами второго суммирующего элемента 13 и второго интегрирующего элемента 14, вход которого соединен с выходом суммирующего элемента 13, а вход последнего соединен с датчиком 15 активной мощности. Входы регулятора В второй машины соединены с выходами третьего суммирующего элемента 16 и третьего интегрирующего элемента 17, вход которого соединен с выходом суммирующего элемента 16, а вход последнего,соединен с датчиком 18 напряжения энергосистемы 2. Последующие входы регулятора соединены с вькодами суммирующего элемента 19 и интегрирующего элемент,а 20, вход которого соединен с выходом суммирующего элемента 19, а входы последнего соединены .с датчиками частоты энергосистемы 1 и 2 и датч.ком 9 углового положения и скорости вращения вала. Вход блока 21 грирующего элемента 14 (на фиг. 1 это соединение показано пунктиром), или с обоими сразу. В последнем случае в цепи соединения, например, с интегрирующим элементом 14 необходим инвертор (на фиг. 1 не показан), что обеспечит согласованное регулирование обеих машин. Вход блока 21 управления соединен с первыми входами двух сумматоров 22 .и 23, вторые входы которых соединены соответственно с задатчиками 24 и 25 уровня скольжения, а выходы через диоды 26 и 27 соединены с входами усилителя 28, например операционного, выход которого соединен с выходом блока 21 управления. Задатчики 24 и 25 представляют собой, например. регулируемые потенциометры с источником постоянного напряжения. Датчик 9 углового положения скорости вращения вала (фиг. 2) содержи синхронный тахогенератор 29, выводы которого соединены с вьтрямительным блоком 30, на выходе которого получа ют сигналы, пропорциональные скорости вращения вала, и с блоком 31 пассивных интеграторов (КС-цепочки), на выходе которого получают гармонические сигналы об угловом положении вала, Регулятор 7 (или 8), показанный на фиг. 3, содержит блоки 32 и 33 преобразования координат. На вход блока 32 поступают сигналы с датчика 9 углового положения вала и с дат чика 34 частоты энергосистемы. Гармонические сигналы управления частоты скольжения машины, получаемые на выходе блока 33, совместно с сигналом обратной связи по току ротора (от датчика 35) поступают на вход усилителя 36, на выходе которого формируется сигнал напряжения возбуждения. Блоки 32 и 33 преобразования координат показаны на фиг. 4, и содержат блоки 37-40 произведения и сумматоры 41 и 42. При работе устройства элементы 10 11, 16 и 17 обеспечивают пропорционально-интегральное регулирование напряжений на статорах машин 3 и 4. Элементы 13 и 14 обеспечивают пропор ционально-интегральное регулирование потока активной мощности через линию электропередачи с предлагаемым устройством. Элементы 19 и 20 реализуют пропорционально-интегральное регулирование скорости вращения вала агрегата. При этом задание (уставка) формируется по сигналам датчиков как полусумма частот объединяемых энерго систем, что позволяет обеспечить наибольшее использование управляемых преобразователей, т.е. в нормальных режимах предлагаемое устройство рабо тает аналогично прототипу. При больших возмущениях в энергосистеме 2, например отключении линии или трехфазном коротком замыкании, приводяп4их к тому, что электромагнитный момент машины 4 падает до нуля, агр гат начинает разгоняться или тормозиться в зависимости от того, работа ла машина 3 в доаварийном режиме соответственно в двигательном или генераторном режиме. При разгоне или торможении разностный сигнал между уставкой и истинной скоростью вращения вала (т.е. сигнал, пропорциональный скольжению) поступает на сумматоры 22 и 23, работающие в компараторном режиме. При этом если сигнал больше допустимого значения, определяемого задатчиками 24 и 25 уровня скольжения, на выходе одного из сумматоров 22 и 23 вьфабатьшается сигнал заданной амплитуды и полярности. Этот сигнал через диод, например 26, и усилитель 28, служащий для усиления сигналов и развязки выходов сумматоров 22 и 23, поступает на интеграторы 14 и 20. Интегратор 14 интегрирует этот сигнал большой амплитуды и тормозит машину 3, переводя ее в генераторный режим. Как только скольжение войдет в диапазон, определяемый задатчиками 24 и 25, сигнал с выхода усилителя 28 исчезает и схема восстанавливается, а следовательно, агрегат снова разгоняется. Очевидно, что, несмотря на то, что в формируемых на выходах элементов 10, 11, 13 и 14 сигналах управления машины 3 нет составляющей по скорости, устойчивость агрегата сохраняется. Как только устранится (после АПВ) возмущение и линия электропередачи восстановится, асинхронизированная синхронная машина реализует пропорционально-интегральное регулирование с дополнительным управляющим сигналом большой амплитуды от блока 21 управления, что позволяет устройству войти в нормальный диапазон скольжений, определяемый задатчиками 24 и 25, и существенно быстрее, чем, например, без указанного блока управления. Поэтому в устройстве может быть использовано и подключение только к одному из указанных интеграторов .. Рассмотрим работу устройства при возмущениях в связьгеаемых энергосистемах. Например, при трехфазйом коротком замыкании в момент t или отключении линии электропередачи в цепи статора машины 3, работающей в генераторном режиме (фиг. 1), активная мощность падает до нуля (фиг. 5а). Так как машина 4, работающая в доаварийном режиме двигателем и управляющаяся по скорости вращения вала агрегата, мгновенно не может сбросить свою мощность, то роторы начнут разгоняться. В момент t, когда скольжение вала достигает значения (фиг. 5в), определяемого задатчиками 24 или 25 уровня (S ур ), на выходе сумматоров 22или 23, работающих в компараторном режиме, вьфабатьшается импульс заданной амплитуды и полярности (фиг. 5г). Этот сигнал с выхода усилителя 28 поступа ет в интегратор 20. Последний интегрирует этот импульс, обеспечивая быстрое снижение управляющего сигнала и соответственно избыточного электромагнитного момента машины 4 (фиг. 5 рГ 6) . В момент , когда роторы начнут тормозиться и скольжение станет ниже значения задатчика уровня, импульс снимается и далее скорость ротора подтягивается к заданию уставки. При этом требуемая скорость вращения вала устанавливается сзтцественно быстрее, нежели без применения предлагаемого управления. Одновременно исключается возможность достижения машиной 4 потолочного зна чения напряжения возбуждения из-за выхода скольжения за допустимый диа пазон (известно, что при достижении напряжением возбу ения потолочного значения асинхронизирования синхрон ная машина практически становится неуправляемой и во избежание выхода из строя зачастую ее необходимо отключать) . Согласованное регулирование обеих машин с помощью инвертора осуществля ется следующим образом. Так как мощность машины 3 равна нулю, то в интегратор 14 поступает только сигнал уставки по активной мощности и сигнал нарастает до момента tj. Для рассмотренного режима в момент tg формируется импульс (фиг. 5г),. кото рый через инвертор подается в инте174 . / гратор 14 (на фиг. 5а показан пунктиром со знаком минус). При этом амплитуду импульса можно выбрать так, что суммарный сигнал управления по активной мощности машины 3 не будет существенно меняться и при удачном АЛВ не будет больших дополнительных возмущений из-за неравенства сигнала управления требуемому исходному значению. Работа устройства при коротком замыкании или отключении линии электропередачи в цепи статора машина 4 проиллюстрирована на фиг.6(а,б, Взг), обозначения на которых аНалогичны обозначениям на фиг. 5. Предлагаемое изобретение может быть применено в устройстве для связи двух энергосистем, состоящем не только из двух АСМ, но -и из АСМ и СМ. Преимуществом предлагаемого устройства перед известными является повышение его устойчивости за счет введения в его схему блока управления, что позволяет вводить в интеграторы ПОСТОЯННЕЙ управляющий сигнал заданной амплитуды и знака, длительность котЪрого определяется моментом возвращения скольжения в заданный диапазон. При этом интеграторы используются как элемент памяти, поэтому в режим машины не вносятся дополнительные возмущения при возврате к нормальной схеме. Каждый из интеграторов 11, 14 и-17 может иметь также свой блок управления со своими диапазонами управляемых параметров, что позволяет дополнительно повысить устойчивость предлагаемого устройства. Кроме того, предлагаемое устройство дает возможность повысить надежность межсистемной связи на базе двух асинхронизированных синхройных машин, т.е. улучшить условия работы потребителей, снижая перерывы в энергоснабжении за счет повышения устойчивости устройства при больших возмущениях в объединенной энергосистеме.
.г 1
.J В ..-Рм g ч Мн-га 111 Г/1}- 4- ф--Г Я0: /г.З QJOJpt с I1 А 55) 1 т:- n.lJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1575262A2 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
1. УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ, содержащее две электрические машины, по крайней мере одна из KOTOpbfx асинхронизированная синхронная, статорные обмотки которой подключены к соответствующей энергосистеме, а роторные обмотки через управляемый преобразователь частоты подключены к выходу регулятора, входы которого соединены с выходами датчика углового положения и скорости вращения вала и датчика частоты энергосистемы, по крайней мере одного суммирующего и по крайней мере одного интегрирующего элементов, при этом вход интегрирующего элемента соединен с выходом соответствующего суммирующего элемента, вход которого соединен с соответстВУЮЩ1-ГМ датчиком регулируемого параметра, отличающее с. я тем, что, с целью повьшения устойчивости, оно снабжено по крайней мере одним блоком управления, при этом по крайней мере один интегрир тощий элемент выполнен с вторым входом, соединен- с выходом блока управления, вход которого соединен с выходом соответствуюего суммирующего элемента, причем блок управления содержит два задатчика уровня скольжения, два сумматора, два диода и один усилитель, при этом вход блока управления соединен с первыми входами первого и второго сумматоров, вторые СП входы которых соединены с задатчиками уровня скольжения, а выходы через диоды соединены с входами усилителя, выход которого соединен с выходом блока управления. 2. Устройство по п. 1, отличающееся тем, что при двух асинх-ронизированных синхронных машинах выход блока управления соединен 4 с вторыми входами двух указанных тегрирзтощих элементов, причем с одX) ним интегрирующим элементом - через ч инвертор. U
JlU}e-a}p}t
Фиг л
Фиг. 5
1 О
0уст/
о
5 уст 2
Фиг.д
i
I I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для обьединения энергосистем | 1974 |
|
SU502445A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 762087, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
