Изобретение относится к электротехнике, а более конкретно к устрой- с ТВ ам для связи энергосистем, и мо- жет быть .использовано для управле- j ния комплексом управляемого соедине-, НИН энергосистем (КУСЭС) на базе асинхронизированного электромеханического преобразователя частоты (АС ЭМПЧ).10
Целью изобретения является повышение пропускной способности связи путем повышения проходной мошнос
. ти устройства для связи двух энергосистем; обеспечение совместного ре- 15 гули рования напряжения машин в за- -шунтированном состоянии АС ЭМПЧ; : повышение вероятности действия автоматического повторного включения от
ключвиной ЛИНИИ электропередачи. 20
На фиг. I представлена структурная схема МСС, содержащая АС ЭМПЧ с системой регулирования; на фиг. 2 - структурная схема блока датчиков системы регулирования; .на фиг. 3 - 25 структурная рхема блока задающих уставок; на фиг. А - структурная схема регулятора ACMj на фиг, 5 - функциональная схема блока управления ключами регулятора .возбуждения АСМ; 30 на фиг. 6 - функциональный блок ус-- тавок. ;
Энергосистемы и 2 связаны между собой двумя линиями электропередачи (ЛЭП) в рассечку одной из которых 5 включен АС ЭМПЧ, который шунтируется вь1ключателем 3. Собственно АС ЭМПЧ содержит; силовые трансформаторы 4 и 5, Первичные обмотки которых через выключатели 6 и 7 включены в рассеч- 40
1 ку .ЛЭП; асинхронизированные машины (АСМ), 8 и 9 с жестко, соединенными . валами, статорные обмотки которых ,
через выключатели 10 и подсоединены к вторичным обмоткам силовых лг
трансформаторов 4 и 5; преобразовательные трансформаторы 12 и 13$ первичные обмотки которых через выключатели 14 и 15 соединены с вторичными обмотками трансформаторов 4 и 5 преобразователи 16 и 17-частоты с непосредственной связьй, питание которых осуществляется от вторичных обмоток трансформаторов 12 и 13, а выходные цепи соединены с роторными обмотками машин 8 и 9, на общем валу которых находятся также датчики 18 и 19 углового положения роторов; пусковое средство, содержащее вьшряj0
5 :
0
5 0
5 0
г
0
5
митель 20, инвертор 21, соединенные звеном постоянного тока. Причем вьт- рямитель при помощи выключателей 22 и 23 подсоединен к вторичным обмоткам трансформаторов 4 и 5, а инвертор при помощи выключателей 24 и 25 подсоединен к статорным обмоткам машин 8 и 9; регуляторы 26 и 27 АСМ, включающие в себя блоки 28 и 29 управления ключами, причем выходные цепи регуляторов подсоединены к входным цепям преобразователей 16 и 17; регулятор 30 пускового средства, выходные цепи которого соединены с цепями управления выпрямителя 20 и инвертора 21; блоки 3 и 32 уставок, включающие в себя блоки 33 и 34 ограничения перегрузок каждой из АСМ, причем выходы блоков уставок под- ключены к входам регуляторов 26 и 27, АСМ; блоки. 33 и 36 датчиков, входы которых соединены с выходами датчиков 18 и 19 углового положения ротора, трансформаторов 37 - 4 ток.а, трансформаторов 42 - 45 напряжения, пунтов 46 и 47 цепи ротора АСМ, , причем трансформаторы тока измеряют соответственно токи; 37 - через вык-, лючатель 6{ 38 - через выключатель 7; 39 - через выключатель 3j 40 - через выключатель 10; 41 - через выключатель 11; первичные . цепи трансформатора 42 и 43 напряжения подключены,в рассечку ЛЭП по обе стороны от выключателя 3, а трансформаторов 44 и 45 напряжения к статорным цепям АрМ 8 и 99 выходы же блоков 35 и 36 датчиков соединены с входами блоков 31 и 32 уставок, регуляторов 26,27 и 30; блок 48 управления -реясимами, на входы которого .поступает информация от блоков 35 .и 36 датчиков,-а также- информация о состо янии всех выключателей, выходы бло ка 48- управления.соединены с блоками 35.и 36 датчиков, с блоками 31 и 32 уставок, а также со всеми выключателями j блок 49 диагностики элементов КУСЭС;- ВЫХОДЫ-которого соединены с входами блока 48 управления, пульт 50 управления, входы которого соединены с выходами 48 управления выходы которого соединены также и с входами пульта 50 управленияJ каналы 51 и 52 передачи информации, выходы которых соединены с входами блоков 35 и 36 датчиков и блоков 31 и 32 уртавок, входы канала 5 соеди .3
нень с вторичными обмотками трансфоматора 53 тока/ первичные обмотки кторого подключены к головному участку ЛЭП с АС ЭМПЧ со стороны энергосистемы 1, и к вторичным обмоткам трансформатора 54 напряжения, первиные обмотки которого подключены к шинам энергосистемы 1, входы канала 52 соединены с вторичными обмотками трансформатора 55 тока, первичные обмотки которого подключены к головному участку с ЛЭП с АС ЭМПЧ со стороны энергосистемы 2, с вторичньми обмотками трансформатора 56 напряжения, первичные обмотки которого подключены к шинам энергосистемы 2, а также с вторичными обмотками трансформатора 57 тока, измеряющего ток по ЛЭП без АС ЭМПЧ.
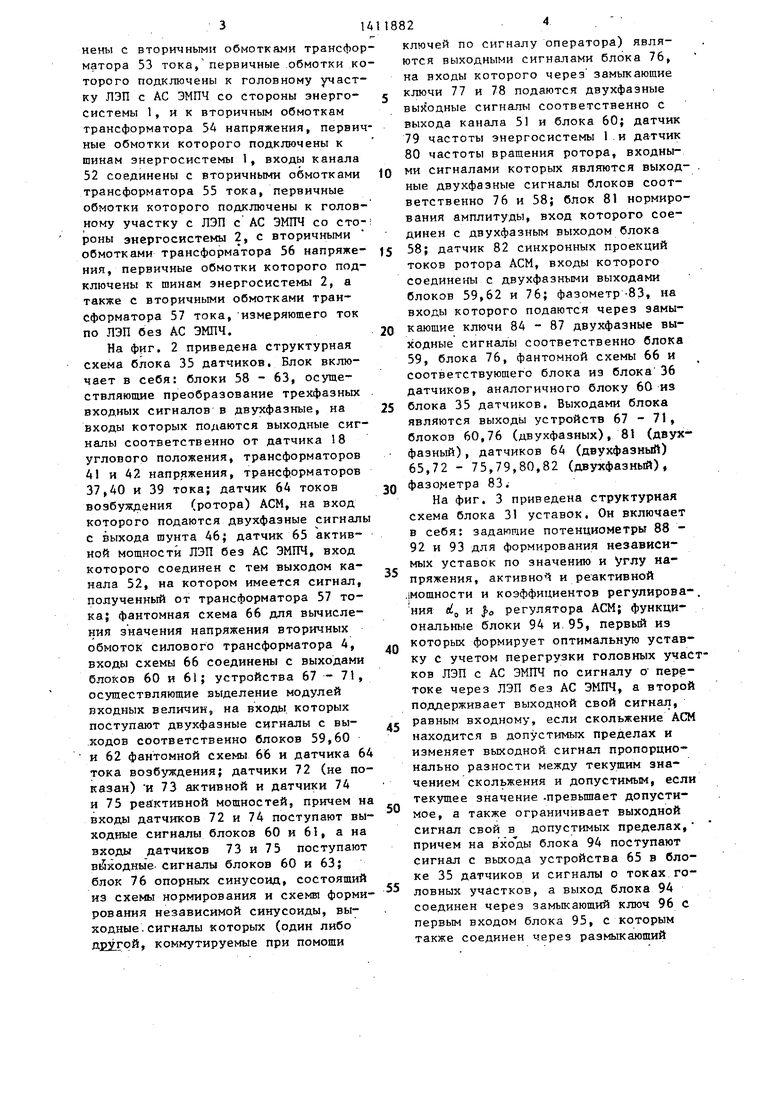
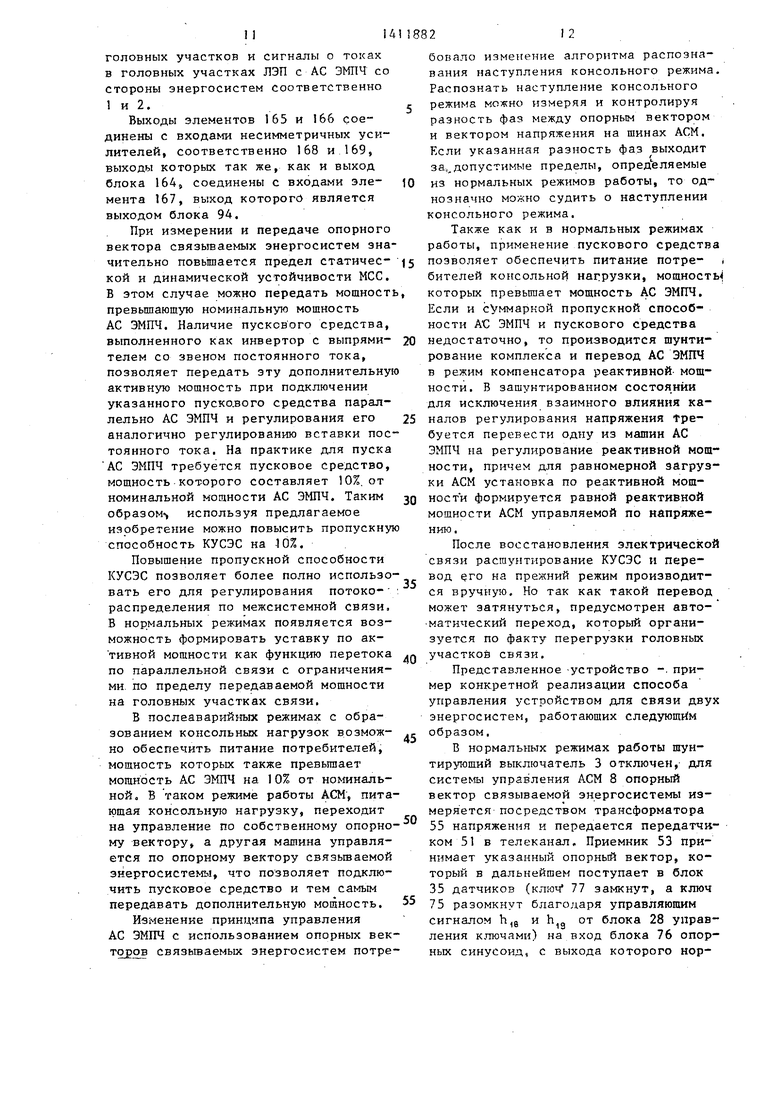
На фиг. 2 приведена структурная схема блока 35 датчиков. Блок включает в себя: блоки 58 - 63, осуществляющие преобразование трехфазных входных сигналов в двухфазные, на входы которых подаются выходные сигналы соответственно от датчика 18 углового положения, трансформаторов 41 и 42 напряжения, трансформаторов 37,40 и 39 тока; датчик 64 токов воэбуждзния (ротора) АСМ, на вход которого подаются двухфазные сигналы с выхода шунта 46; датчик 65 активной мощности ЛЭП без АС ЭМПЧ, вход которого соединен с тем выходом канала 52, на котором имеется сигнал, полученный от трансформатора 57 тока; фантомная схема 66 для вычисления значения напряжения вторичных обмоток силового трансформатора 4, входы схемы 66 соединены с выходами блоков 60 и 61; устройства 67 - 71, осуществляющие выделение модулей входных величин, на входы, которых поступают двухфазные сигналы с вы- .ходов соответственно блоков 59,60 и 62 фантомной схемы 66 и датчика 64 тока возбуткдения; датчики 72 (не показан) и 73 активной и датчики 74 и 75 реактивной мощностей, причем на входы датчиков 72 и 74 поступают выходные сигналы блоков 60 и 61, а на входы датчиков 73 и 75 поступают вйходные сигналы блоков 60 и 63; блок 76 опорных синусоид, состоящий из схемы нормирования и схеми формирования независимой синусоиды, выходные, сигналы которых (один либо , коммутируемые при помощи
18824 .
ключей по сигналу оператора) являются выходными сигналами блока 76, на входы которого через замыкающие 5 ключи 77 и 78 подаются двухфазные вы(одные сигналы соответственно с выхода канала 5 и блока 60; датчик
79частоты энергосистемы 1.и датчик
80частоты вращения ротора, входны- 0 ми сигналами которых являются выход- .
ныв двухфазные сигналы блоков соответственно 76 и 58; блок 81 нормирования амплитуды, вход которого соединен с двухфазным выходом блока
5 58; датчик 82 синхронных проекций токов ротора АСМ, входы которого соединены с двухфазными выходами блоков 59,62 и 76; фазометр -83, на входы которого подаются через замы0 кающие ключи 84 - 87 двухфазные выходные сигналы соответственно блока 59, блока 76, фантомной схемы 66 и соответствующего блока из блока 36 датчиков, аналогичного блоку 60 из
5 блока 35 датчиков. Выходами блока являются выходы устройств 67 - 71, блоков 60,76 (двухфазных), 81 (двух фазный), датчиков 64 (двухфазный) 65,72 - 75,79,80,82 (двухфазный),
0 фазо14етра 83.
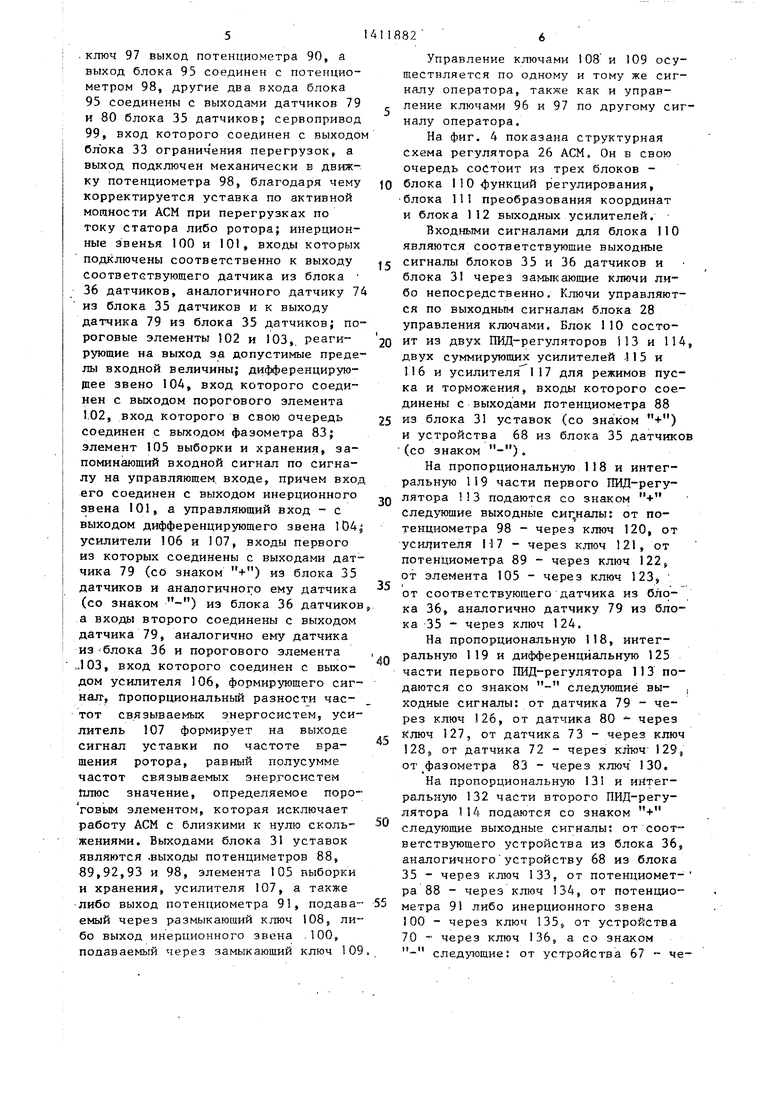
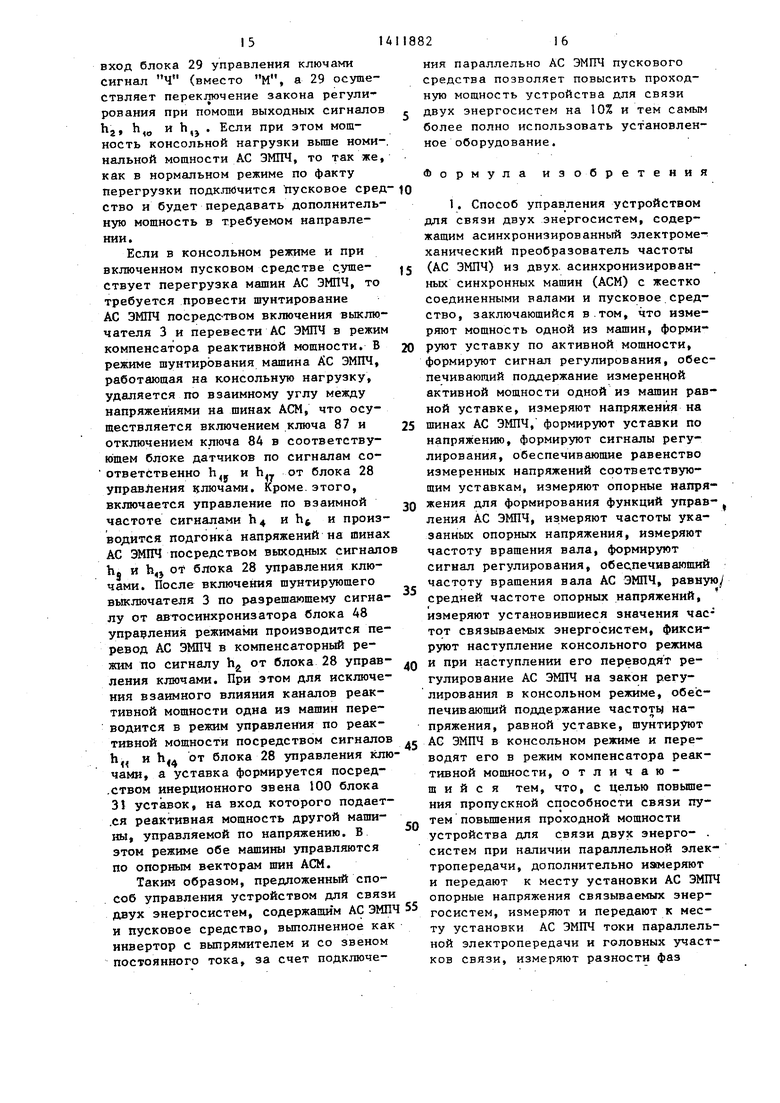
На фиг. 3 приведена структурная схема блока 31 уставок. Он включает в себя: задающие потенциометры 88 - 92 и 93 для формирования независимых уставок по значению и Углу напряжения, активно i и реактивной .МОЩНОСТИ и коэффициентов регулирова-. ния и }о регулятора АСМ; функциональные блоки 94 и.95, первый из
п которых формирует оптимальную уставU
ку с учетом перегрузки головных участков ЛЭП с АС ЭМПЧ по сигналу о перетоке через ЛЭП без АС ЭМПЧ, а второй поддерживает выходной свой сигнал,
- равным входному, если скольжение АСМ находится в допустимых пределах и изменяет выходной сигнал пропорционально разности между текущим значением скольжения и допустимым, если текущее значение .превьщ1ает допустимое, а также ограничивает выходной сигнал свой в допустимых пределах, причем на вхо ды блока 94 поступают сигнал с выхода устройства 65 в блоке 35 датчиков и сигналы о токах го- 5 ловнык участков, а выход блока 94 соединен через замыкающий ключ 96 С первым входом блока 95, с которым также соединен через размыкающий
.ключ 97 выход потенциометра 90, а выход блока 95 соединен с потенциометром 98, другие два входа блока 95 соединены с выходами датчиков 79 и 80 блока 35 датчиков; сервопривод 99, вход которого соединен с выходом блока 33 огранич ения перегрузок, а выход подключен механически в движку потенциометра 98, благодаря чему корректируется уставка по активной мощности АСМ при перегрузках по току статора либо ротора; инерционные звенья 100 и 101, входы которых подключены соответственно к выходу соответствующего датчика из блока 36 датчиков, аналогичного датчику 74 из блока 35 датчиков и к выходу датчика 79 из блока 35 датчиков; пороговые элементы 502 и 103,. реагирующие на выход за допустимые пределы входной величины; дифференцирующее звено 10А, вход которого соединен с выходом порогового элемента 1.02, вход которого в свою очередь соединен с выходом фазометра 83; элемент 105 выборки и хранения, запоминающий входной сигнал по сигналу на управляющем, входе, причем вход его соединен с выходом инерционного звена 101, а управляющий вход - с выходом дифференцирующего звена lOAg усилители 106 и 107, входы первого из которых соединены с выходами дат™ чика 79 (со знаком +) из блока 35 датчиков и аналогичного ему датчика (со знаком -) из блока 36 датчиков а входы второго соединены с выходом датчика 79, аналогично ему датчика из блока 36 и порогового элемента ,ЛОЗ, вход которого соединен с выходом усилителя 106, формирующего сигнал-. Пропорциональный разности частот связываемых энергосистем, уси литель 107 формирует на выходе сигнал уставки по частоте вращения ротора, равный полусумме частот связываемых энерд осистем Плюс значение, определяемое поре- говым элементом, которая исключает работу АСМ с близкими к нулю скольжениями. Выходами блока 31 уставок являются .выходы потенциметров 88, 89,92,93 и 98, элемента 105 выборки и хранения, усилителя 107, а также либо выход потенциометра 91, подава- емый через размыкающий ключ 108, либо выход инерционного звена .100, подаваемый через замыкающий ключ 109
Управление ключами 108 и 109 осуществляется по одному и тому же сигналу оператора, также как и управление ключами 96 и 97 по другому сигналу оператора.
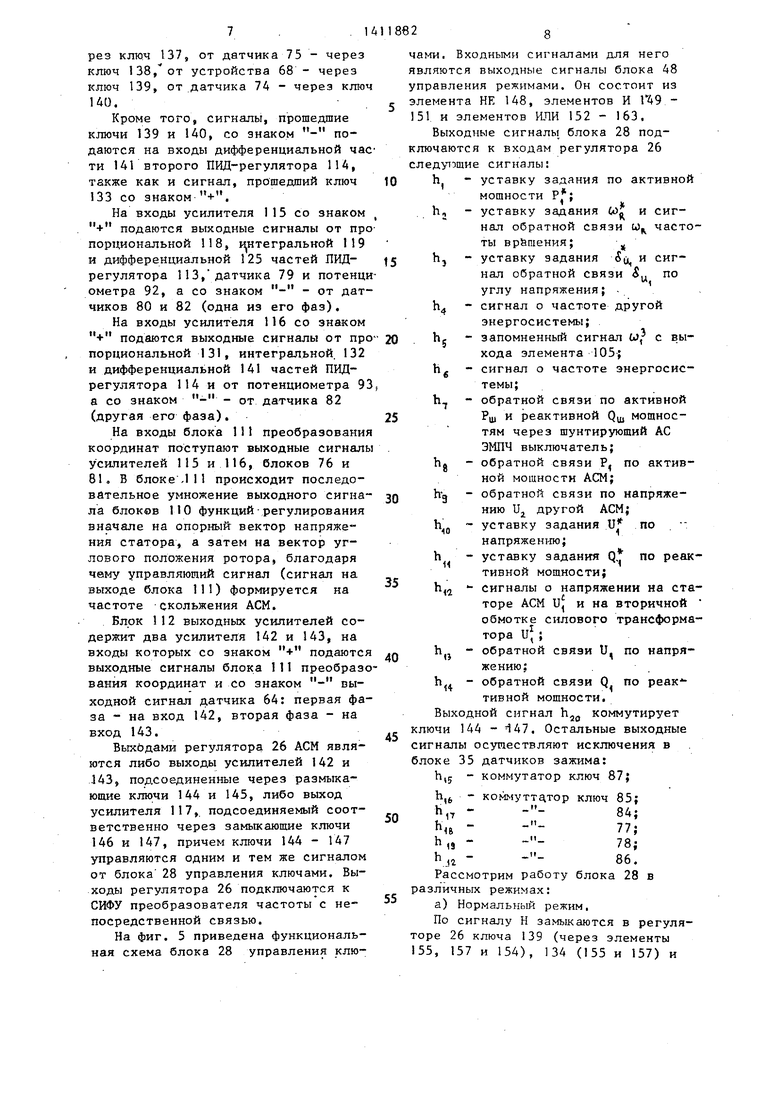
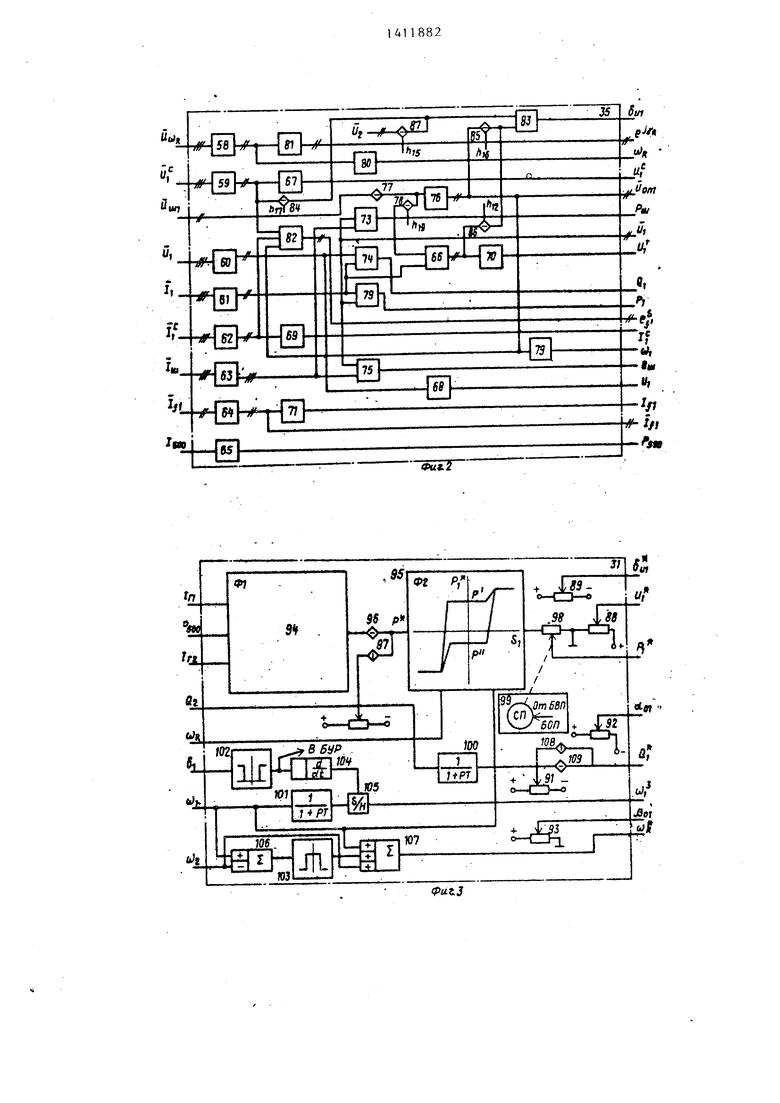
На фиг, 4 показана структурная схема регулятора 26 АСМ, Он в свою очередь состоит из трех блоков - блока 110 функций регулирования, блока 111 преобразования координат и блока 112 выходных усилителей,
Входными сигналами для блока 110 являются соответствующие выходные сигналы блоков 35 и 36 датчиков и блока 31 Через замыкающие ключи либо непосредственно. Ключи управляются по выходным сигналам блока 28 управления ключами. Блок 110 состо- ит из двух ПИД-регуляторов 113 и 114, двух суммирующих усилителей .115 и 116 и усилителя 117 для режимов пуска и торможения, входы которого соединены с выходами потенциометра 88 из блока 31 уставок (со знаком +) и устройства 68 из блока 35 датчиков (со знаком -).
На пропорциональную 118 и интегральную 119 части первого ПИД-регу- лятора 3 подаются со знаком +
5
5
5
O
следующие выходные сиг налы: от потенциометра 98 - через ключ 120, от усаг ителя И 7 - через ключ 121, от потенциометра 89 - через ключ 122 от элемента 105 - через ключ 123, от соответствующего датчика из ка 36, аналогично датчику 79 из блока 35 - через ключ 124.
На пропорциональную 118, интегральную 119 и дифференциальную 125 части первого ПИД-регул.ятора 113 подаются со знаком - следующие вы- ; ходные сигналы: от датчика 79 - через ключ 126, от датчика 80 - через 127, от датчика 73 - через ключ 1285 от датчика 72 - через ключ 129 от фазометра 83 - через ключ 130,
На пропорциональную 13 и интегральную 132 части второго ПИД-регу- лятора 114 подаются со знаком -I- следующие выходные сигналы; от соответствующего устройства из блока 36, аналогичного устройству 68 из блока 35 - через ключ 133, от потенциомет- ра 88 - через ключ 134, от потенцио метра 91 либо инерционного звена 100 - через ключ 135 от устройства 70 - через ключ 136, а со знаком - следующие: от устройства 67 через ключ 137, от датчика 75 - через ключ 138/ от устройства 68 - через ключ 139, от датчика 74 - через ключ 140.
Кроме того, сигналы, прошедшие ключи 139 и 140, со знаком - подаются на входы дифференциальной час ти 141 второго ПИД-регулятора 114, также как и сигнал, прошедший ключ 133 со знаком +.
На входы усилителя 115 со знаком + подаются выходные сигналы от пропорциональной 118, нтегралькой 119 и дифференциальной 125 частей ПИД- регулятора 113, датчика 79 и потенциометра 92, а со знаком - - от датчиков 80 и 82 (одна из его фаз).
На входы усилителя 116 со знаком подаются выходные сигналы от про порциональной 131, интегральной. 132 и дифференциальной 141 частей ПИД- регулятора 114 и от потенциометра 93 а со знаком - - от датчика 82 (другая его фаза).
На входы блока 111 преобразования координат поступают выходные сигналы усилителей 115 и 116, блоков 76 и 81, В блоке ,1 1 1 происходит последовательное умножение выходного сигнала блоков ПО функций регулирования вначале на опорный вектор напряжения статора, а затем на вектор углового положения ротора, благодаря чему управляющий сигнал (сигнал на выходе блока 111) формируется на частоте -скольжения АСМ.
Блок 112 выходных усилителей содержит два усилителя 142 и 143, на входы которых со знаком + подаются выходные сигналы блока 111 преобразования координат и со знаком - выходной сигнал датчика 64: первая фаза - на вход 142, вторая фаза - на вход 143.
Выходами регулятора 26 АСМ являются либо выходы усилителей 142 и 143, подсоединенные через размыкающие ключи 144 и 145, либо выход усилителя 117, подсоединяемый соответственно через замыкающие ключи 146 и 147, причем ключи 144 - 147 управляются одним и тем же сигналом от блока 28 управления ключами. Выходы регулятора 26 подключаются к СИФУ преобразователя частоты с не посредственной связью.
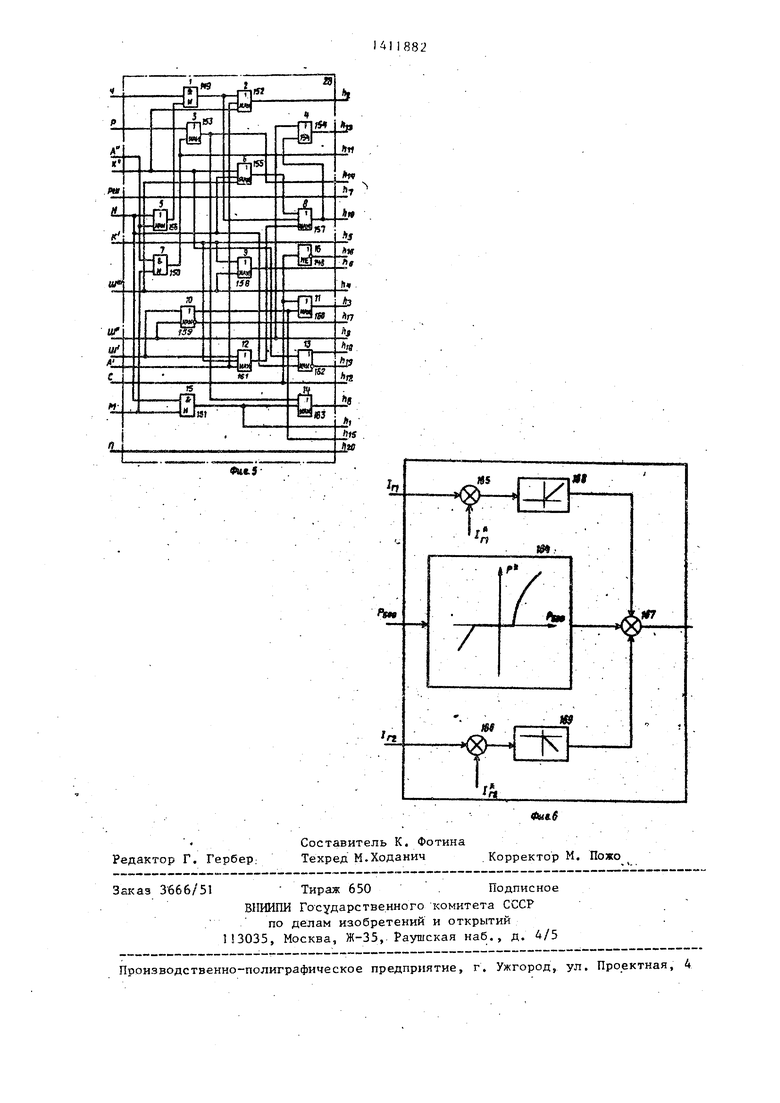
На фиг. 5 приведена функциональная схема блока 28 управления клю
5
0
5
0
чами. Входными сигналами для него являются выходные сигналы блока 48 управления режимами. Он состоит из элемента НЕ 148, элементов И Г49 - 151 и элементов ИЛИ 152 - 163,
Выходные сигналы блока 28 подключаются к входам регулятора 26 следутошие сигналы:
h - уставку задания по активной
мощности
h, - уставку задания w| и сигнал обратной связи и частоты врйшения; hj - уставку задания ijx и сигнал обратной связи &.. по
i углу напряжения; h - сигнал о частоте другой энергосистемы;
hg - запомненный сигнал W, с выхода элемента 105-;
hg - сигнал о частоте энергосистемы;
h - обратной связи по активной РШ и реактивной рщ мошнос- тям через шунтирующий АС ЭМПЧ выключатель;
hg - обратной связи Р, по активной мощности АСМ;
ha - обратной связи по напряже5
0
5
ь:
10
нию и, другой АСМ; уставку задания U
по
11
ма
напряжению;
-уставку задания Q по реактивной мощности;
-сигналы о напряжении на статоре АСМ uj и на вторичной обмотке силового трансформатора и, ;
hjj - обратной связи U по напряжению;h.. - обратной связи Q по реак тивной мощности. Выходной сигнал h коммутирует ключи 144 - 47, Остальные выходные сигналы осуществляют исключения в блоке 35 датчиков зажима: h,5 - коммутатор ключ 87{
0
5
Vfr
17
Чв 19
л
- ключ 85;
84; 77;
-«.
78; 86.
Рассмотрим работу блока 28 в различных режимах:
а) Нормальный режим.
По сигналу Н замыкаются в регуляторе 26 ключа 139 (через элементы 155, 157 и 154), 134 (155 и 157) и
либо 12 и 127 (через 156,149 и 152 если от блока 48 наряду с сигналом Н придет еще сигнал Ч( означающий управлять по частоте врашения), либо 120 (через 151) и 129 (через 15.1 и 163), если вместо сигнала Ч от блока 4.8 придет сигнал М (означающий Управлять по активной мощности) ,
В блоке 35 датчиков замыкается ключ 77 (через прямой выход элемента 16.2). Во всех остальных режимах, кроме К , ключ 77 разомкнут, а ключ 78 замкнут (через инверсный выход элемента 162),
б)Режим на консольной машине.
По сигналу к в регуляторе 26 замыкаются ключи 123 (непосредственно) 26 (через 158), 134 (155 и 157) и 139 (155, 157 и 154);
в)Режим на нёконсольной машине.
По сигналу к в регуляторе 26 замыкаются ключи 121 и 127 (через 152) 134 (155 и 157) и 139 (155, 157 и 154). В блоке 35 датчиков замыкается ключ 77 и размыкается 78 (через 162);
г)Режим синхронизации,
По сигналу С в регуляторе 26 замыкаются ключи 122 и 130 (через 160) 136 и 137 (непосредственно).
В блоке 35 датчиков замыкается ключ 86 (непосредственно по сигналу С) и размыкается 85 (через 148).
д) Режим разгрузки.
По сигналу Р в регуляторе 26 замыкаются ключи 140 (через 153) и 129 (через 153 и 163).
е).Режим компенсатора для одной машины.
По сигналу А в регуляторе 26 замыкаются ключи 139 (через 161, 157 и 154), 134 (161 и 157) и 121 и 127 (через 152).
ж) Режим компенсатора для двух машин.
у
По сигналу А в регуляторе 26 за мыкаются ключи либо 12 и 127 (через 156,449 и 152), 134 (156, 149 и 157) и 139 (156, 149, 157 и 154), либо 135 (через-150), 140 (150 и 153) и 129 (150, 153 и 163). В пер- ЗОМ-Случае наряду с А имеется еше и сигнал Ч, в о втором случае - сигнал М.
з) Режим расшунтирования. По сигналу РШ непосредственно в регуляторе 26 замыкаются ключи 128 5 и 138.
и) Режим консольной машины при шунтировании.
По сигналу Ю в регуляторе 26 замыкаются ключи 126 (через 158) и 124 10 (непосредственно), 134 (155 и 157) и 39 (155, 157 и 154).
к) Режим неконсольной машины при шунтировании.
По сигналу Ш в регуляторе 26 за- JC мыкаются ключи 139 (через 154), 122 и 130 (через 159 и 160) и 133 (непосредственно) .
В блоке 35 датчиков замьпсается ключ 87 и размыкается ключ 84 (соот- 20 ветственно через прямой и инверсный выходы элемента 159).
Режимы и и к в сочетании обеспечивают шунтирование в консольном режиме. , 25 ) Шунтирование АС ЭМПЧ в нормальном режиме.
По сигналу Ш в регуляторе 26 замыкаются ключи 122 и 130 (через 159 и 160), 134 (161 и 157) и 139 (161, 30 157 и 154).,
В .блоке 35 датчиков замыкается , ключ 87 и размыкается 84 (через 159). Режимы к и л в сочетании обеспечивают шунтирование в нормальном режиме. м) Режимы пуска и торможения.
По сигналу П непосредственно в регуляторе 26 замыкаются ключи 146 и 147 и размыкаются ключи 144 и 145.
40
50
Во всех режимах, кроме Ш и Ш в
блоКе 35 датчиков замкнут ключ 84 (через инверсный выход элемента 159),
Во всех режимах, кроме С, в блоке 35 датчиков замкнут ключ 85 (через д5 элемент 148). ,
На фиг. 6 приведена структурная схема блока 94, формирующего опта- мальную уставку на переток активной мощности через АС ЭМПЧ с учетом нагрузки головных участков ЛЭП с АС ЭМПЧ. Он состоит из блока 164 формирования оптимальной уставки, элементов 165 - 167 суммирования и несим- . , метричных усилителей I6& и 169; Вход блока формирования соединен с выходом датчика 65 активной мощности ЛЭП без АС ЭМПЧ. На входы элементов 165 и 166 подаются уставки, равные параллельно допустимым значениям токов
головных участков и сигналы о токах в головных участках ЛЭП с АС ЭМПЧ со стороны энергосистем соответственно 1 и 2.
Выходы элементов 165 и 166 соединены с входами несимметричных усилителей, соответственно 168 и 169, выходы которых так же, как и выход блока 164, соединены с входами эле- мента 167, выход которого является выходом блока 94.
При измерении и передаче опорного вектора связываемых энергосистем значительно повьшается предел статнчес- кой и динамической устойчивости МСС. В этом случае можно передать мощност превьшаюшую номинальную мощность АС ЭМПЧ. Наличие пусков ого средства, выполненного как инвертор с выпрями- телем со звеном постоянного тока, позволяет передать эту дополнительную активную мощность при подключении указанного пускового средства параллельно АС ЭМПЧ и регулирования его аналогично регулированию вставки постоянного тока. На практике для пуска АС ЭМПЧ требуется пусковое средство, мощность которого составляет 10%, от номинальной мопхности АС ЭМПЧ. Таким образом-, используя предлагаемое изобретение можно повысить пропускную способность КУСЭС на J0%.
Повышение пропускной способности КУСЭС позволяет более полно использовать его для регулирования потоко- распределения по межсистемной связи, В нормальных режимах появляется возможность формировать уставку по активной мощности как функцию перетока по параллельной связи с ограничениями по пределу передаваемой мощности на головных участках связи.
В послеаварийиых режимах с образованием консольных нагрузок возможно обеспечить питание потребителей, мощность которых также превышает мощность АС ЭМПЧ на 10% от номинальной. В таком режиме работы АСМ, питающая консольную нагрузку, переходит на управление по собственному опорно му вектору, а другая машина управляется по опорному вектору связьтаемой энергосистемы, что позволяет подключить пусковое средство и тем самым передавать дополнительную мощность.
Изменение принципа управления АС ЭМПЧ с использованием опорных векторов связьшаемых энергосистем потре
5
Q
5, 20 25 Q
40
45
50
55
бовало изменение алгоритма распознавания наступления консольного режима. Распознать наступление консольного режима можно измеряя и контролируя разность фаз между опорным вектором и вектором напряжения на шинах АСМ. Ксли указанная разность фаз выходит за,допустимые пределы, опред еляемые из нормальных режимов работы, то од нозначно можно судить о наступлении консольного режима.
Также как и в нормальных режимах работы, применение пускового средства позволяет обеспечить питание потре- i бителей консольной нагрузки, мощность которых превьтает мощность АС ЭМПЧ. Если и суммарной пропускной способности АС ЭМПЧ и пускового средства недостаточно, то производится шунтирование комплекса и перевод АС ЭМПЧ в режим компенсатора реактивной- мощности. В зашуктированном состоянии для исключения взаимного влияния каналов регулирования напряжения Требуется перевести одну из машин АС ЭМПЧ на регулирование реактивной мощности, причем для равномерной загрузки АСМ установка по реактивной мощности формируется равной реактивной мощности АСМ управляемой по напряжению.
После восстановления электрической связи расшунтирование КУСЭС и перевод го на прежний режим производится вручную. Но так как такой перевод может затянуться, предусмотрен авто- матический переход, который организуется по факту перегрузки головных участков связи.
Представленное -устройство -. пример конкретной реализации способа управления устройством для связи двух энергосистем, работающих следующим образом.
В нормальных режимах работы шун- тир тащий выключатель 3 отключен,- для системы управления АСМ 8 опорный вектор связываемой энергосистемы измеряется посредством трансформатора 55 напряжения и передается передатчиком 51 в телеканал. Приемник 53 принимает указанный опорный вектор, который в дальнейшем поступает в блок 35 датчиков (ключ 77 замкнут, а ключ 75 разомкнут благодаря управляющим сигналом h,g и от блока 28 управления ключами) на вход блока 76 опорных синусоид, с выхода которого нор
t5
20
25
1 рованный оггкал опорного вектора ijjcn поступаег в регулятор 26 АСМ 8 ijia один из в ссдов преобразователя координат, Аи.алогично для системы г управления АСН 9 поступает опорный нектор связываемой энергосистемы, измеренный трансформатором 56 напряжения. Режим по активной мощности АС ЭМПЧ определяется в блоке уста- Ю I1OK с . помощью функциональных блоков f 14 и 95 на оснэве информации о токе 11Л-50р кВ, измеряемом трансформатором 57 тока с учетом пропускной способности головных участков связи J20 кВ. Уставки по напряжению опрелеляются потенциометром 88 в блоках 21 и 32. В нормальном режиме регуляторы АСМ обеспечивают поддержание заданной уставки активной мощности н заданные значения напряжений на ши нах АСМ, при этом частота вращения вала поддерживается равной средней астоте опорных векторов. Уставка для частоты вращения вала формируется в Споке 31 уставок посредством сумматоров 107 и 106 порогового элемента 103. Перегрузка роторных или статор- иых цепей АС ЭМПЧ выявляется в блоке (8 управления режимами на основе информации о модуле тока статора (блок 69) и ротора (блок 7) блоков датчиков режимных параметров 35 и 36, При перегрузке АС ЭМПЧ блок 48 уп равления режимами в зависимости от направления перетока мощности подклю- ч|ает параллельно АС ЭМПЧ пусковое с|редсгво посредством выключателей 22 Ц 25 или 23 и 24, а также осущест- в|ляет перестройку регулятора СПЧР 3JO на закон позволяющий передавать Л|опЬлнительную активную мощность. Если при этом нет перегрузки АСМ,
1JO КУСЭС будет работать в таком ре- л(име до тех пор, пока уставка по е|ктивной мощности не станет меньше в|оминальной мощности АС ЭМПЧ. Если у|ставка по активной мощности столь в|ысока, что подключение пускового с|редства HP позволяет исключить пе- р|егрузку мащин АС ЭМПЧ, то требуется cjOBMecTHO с подключением пускового с|рёдства ограничение уставки по ак- т|ивной мощности и напряжению. В Предлагаемом устройстве предусмотрены 33 и 34 ограничения перегрузок, 55 кЬторые воздействуют только на устав- к|у по активной мощности с помощью пЬтенциометра 98, управляемого серво--.
4П882
приводом регрузке АС ЭМПЧ, , либо
30
35
40
45
50
т N
выходе не
или 169, в блоке 3 рых увели уставки н через АС (генерато мой по ак ет уставк если она режим маш головной управляем уменьшает жиме -и ув разгружая воположно ности маш минальных ков 35 и ность фаз вектором информаци тавок и 3 выход кот ступлении пает в бл однавреме к долгоср тоты в эн ференциат борки и х на 101 бл наступлен 48 управл включения ча 77 в б сигналами ния ключа ние опорн ющей конс но происх гулирован hg, h.g 5 h чами) эт чивающий ной запом мы и хран и хранени машина ос частоты в ли вторая регулиров блок упра
5
0
5
г
5
882
приводом регрузке АС ЭМПЧ, , либо
0
5
0
5
0
14
99 блока 31 головных участков т.е. когда либо I
устабок. При ЛЭП с
пе I
г,
появляется сигнал На
т N т
2 выходе несимметричного усилителя 168
или 169, функционального блока 94 в блоке 31 уставок, пераый из которых увеличивает абсолютное значение уставки на. переток активной мощности через АС ЭМПЧ, если она положительна (генераторный режим машины уАравляе- мой по активной мощности), и уменьща- ет уставку по абсолютному значению, если она отрицательна (двигательный режим машины), при этом разгружается головной участок со стороны машины, управляемой по мощности, второй же уменьшает уставку в генераторном режиме -и увеличивает в двигательном, , разгружая головной участок с.противоположной для управляемой по мощности машины стороны. Постоянно в номинальных режимах фазометром 83 блоков 35 и 36 датчиков измеряется разность фаз между опорным вектором и вектором напряжения на шинах АСМ, информация поступает в блоки 31 уставок и 32 на.пороговьй элемент 102, выход которого сигнализирует о наступлении консольного режима и поступает в блок 48 управления режимами, однавременно происходит запоминание к долгосрочное хранение уровня частоты в энергосистеме с помощью дифференциатора 104, элемента 105 выборки и хранения и инерционного звена 101 блока 31 уставок о По факту наступления консольного режима блок 48 управления режимами посредством включения ключа 78 и отключения клю ча 77 в блоке 35 датчиков (выходными сигналами, h, л блока 28 управления ключами) осущестЕля€:т переключение опорных векторов на машине пита™ ющей консольную нагрузку, Одйовремен- но происходит изменение закона ре-, гулирования (по выходньм сигналам hg, h.g 5 h(o 5 hj. блока управления ключами) этой машины на законр обеспечивающий поддержание частотЫд равной запомненной частоте энергосистемы и хранящейся в элементе выборки и хранения блока 105 уставок. Вторая машина осуществляет регулирование частоты вращения вала, при этом если вторая АСМ в доавари ;ном режиме регулировала активную мощность, то блок управления режимами выдает на
вход блока 29 управления ключами сигнал Ч (вместо М, а 29 осуществляет переключение закона регули рования при помоши выходных сигналов
2 w о Р этом мощность консольной нагрузки вьппе номинальной мощности АС ЭМПЧ, то так же, как в нормальном режиме по факту перегрузки подключится пусковое средство и будет передавать дополнительную мощность в требуемом направлении.
Если в консольном режиме и при включенном пусковом средстве существует перегрузка машин АС ЭМПЧ, то требуется провести шунтирование АС ЭМПЧ посредс-твом включения выключателя 3 и перевести АС ЭМПЧ в режим компенсатора реактивной мощности. В режиме шунтирования машина АС ЭМПЧ, работающая на консольную нагрузку, удаляется по взаимному углу между напряжениями на шинах АСМ, что осуществляется включением ключа 87 и отключением ключа 84 в соответствующем блоке датчиков по сигналам соответственно h и Ь„ от блока 28 управления ключами. Кроме.этого, включается управление по взаимной частоте сигналами h4 и h и производится подгонка напряжений на шинах АС ЭМПЧ посредством выходных сигнало hj и h,j от блока 28 управления ключами. После включения щунтирующего выключателя 3 по разрешающему сигналу от автосинхронизатора блока 48 управления режимами производится перевод АС ЭМПЧ в компенсаторный режим по сигналу h от блока 28 управления ключами. При этом для исключения взаимного влияния каналов реактивной мощности одна из машин переводится в режим управления по реактивной мощности посредством сигналов Ь„ и h от блока 28 управления ключами, а уставка формируется посред- .ством инерционного звена 100 блока 31 уставок, на вход которого подает- .ся реактивная мощность другой машины, управляемой по напряжению. В этом режиме обе машины управляются по опорным векторам шин АСМ.
Таким образом, предложенный способ yпpaвлe шя устройством для связи двух энергосистем, содержаши м АС ЭМПЧ и пусковое средство, выполненное как инвертор с выпрямителем и со звеном постоянного тока, за счет подключения параллельно АС ЭМПЧ пускового средства позволяет повысить проходную мощность устройства для связи двух энергосистем на 10% и тем самым более полно использовать установленное оборудование.
Формула изобретения
10
5
1. Способ управления устройством для связи двух энергосистем, содержащим асинхронизированный электроме- ханический преобразователь частоты
5 (АС ЭМПЧ) из двух, асинхронизирован- ных синхронных машин (АСМ) с жестко соединенными валами и пусковое,средство, заключающийся в.том, что измеряют мощность одной из машин, форми0 руют уставку по активной мощности, формируют сигнал регулирования, обеспечивающий поддержание измеренной активной мощности одной из машин равной уставке, измеряют напряжения на
5 шинах АС ЭМПЧ, формируют уставки по напряжению, формируют сигналы регулирования, обеспечивающие равенство измеренных напряжений соответствующим уставкам, измеряют опорные напря0 жения для формирования функций управ- ления АС ЭМПЧ, измеряют частоты указанных опорных напряжения, измеряют частоту вращения вала, формируют сигнал регулирования, обеспечивающий частоту вращения вала АС ЭМПЧ, равную/ средней частоте опорных напряжений, измеряют установившиеся значения частот связываемых энергосистем, фиксируют наступление консольного режима
Q и при наступлении его переводят регулирование АС ЭМПЧ на закон регулирования в консольном режиме, обеспечивающий поддержание частоты напряжения, равной уставке, шунтируют
5 АС ЭМПЧ в консольном режиме и переводят его в режим компенсатора реактивной мопшости, отлнчаю- ш и и с я тем, что, с целью повьш1е- ния пропускной способности связи пуП тем повьщ1ения проходной мощности устройства для связи двух энерго- . систем при наличии параллельной электропередачи, дополнительно намеряют и передают к месту установки АС ЭМПЧ опорные напряжения связываемых энергосистем, измеряют и передают к месту установки АС ЭМПЧ токи параллельной электропередачи и головных участков связи, измеряют разности фаз
IU
.Г
Фц&9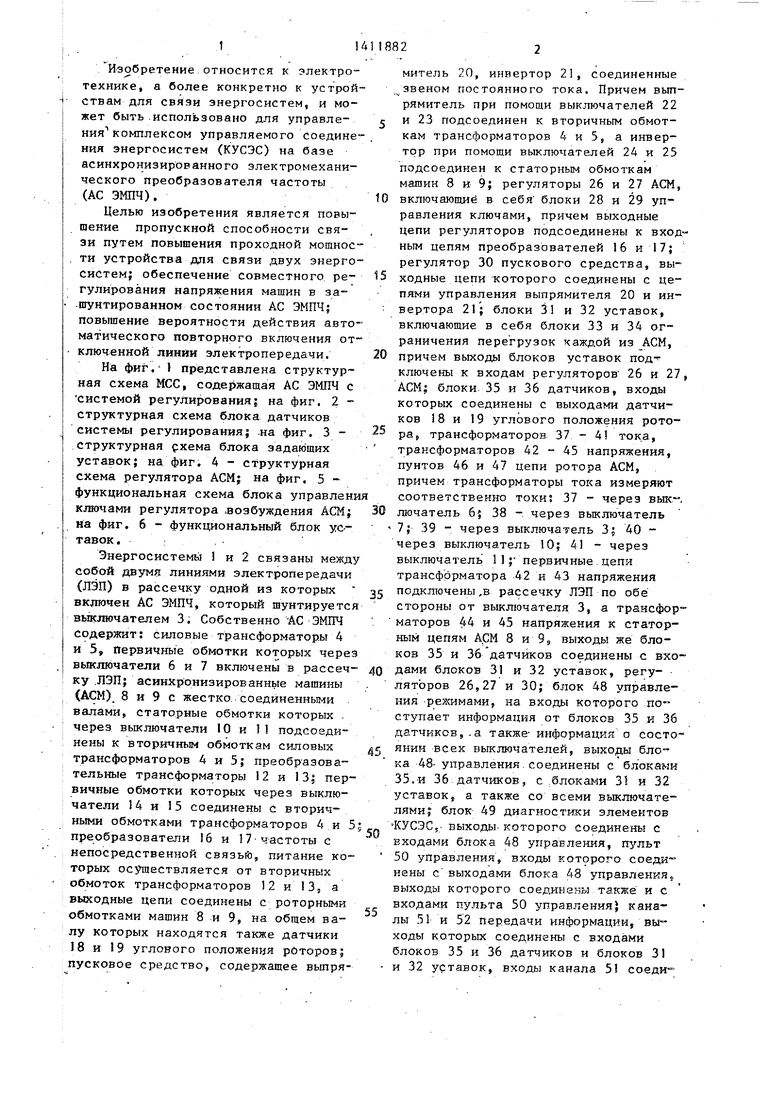


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Способ однофазного автоматического повторного включения (ОАПВ) линии электропередачи | 1986 |
|
SU1394327A1 |

Изобретение относится к электротехнике. Целью изобретения является повьшение проходной мощности устройства для связи двух энергосистем при наличии параллельной электропередачи, обеспечение совместного регулирования напряжения машин в защунти- рованном состоянии асинхронизирован- ного электромеханического преобразователя частоты (АС ЭМПЧ), снижение вероятности отказов в действии автоматического повторного включения отключенной линии электропередачи. Для этого в системах регулирования асинхронизированных синхронных машин (АСМ), входящих в АС ЭМПЧ, используются опорные напряжения связьшаемых энергосистем. В случае перегрузки АС ЭМПЧ параллельно ему подключают пусковое средство, выполненное как выпрямитель и инвертор со звеном постоянного тока, и передают по пусковому средству дополнительную мощность. В зашунтированном состоянии одна из АСМ поддерживает заданное значение напряжения, а вторая АСМ обеспечивает поддержание заданной реактивной мощности, причем в качестве задания реактивной мощности используется измеренная реактивная мощность первой АСМ. АСМ, питающая консольную нагрузку, управляется с использованием опорного напряжения на шинах АСМ и регулируется по частоте напряжению, причем .уставкой служит установившееся значение частоты энергосистемы. 2 з.п.-ф-лы, 6 ил. с (/ С СХ) 00 hd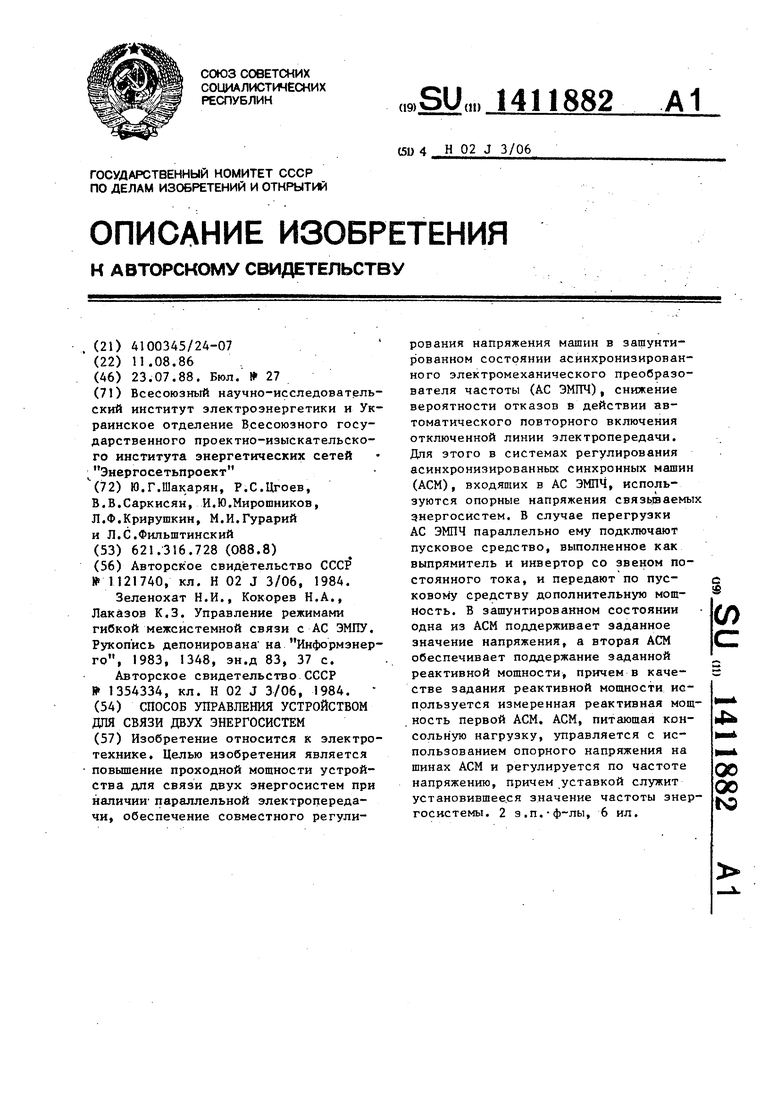
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Зеленохат Н.И., Кокорев Н.А., Лаказов К.З | |||
| Управление режимами гибкой межсистемной связи с АС ЭМПУ | |||
| Рукопись депонирована на Информэнер- го, 1983, 1348, эн.д 83, 37 с | |||
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
