(5) СИНХРОННАЯ т ФАЗНАЯ МАШИНА С УСТРОЙСТВОМ ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ СОСТАВЛЯЮЩИХ ТОКОВ ИЛИ НАПРЯЖЕНИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемая синхронная машина | 1977 |
|
SU729807A1 |
| Бесконтактная электрическая машина постоянного тока (ее варианты) | 1985 |
|
SU1274081A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2311721C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2393614C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
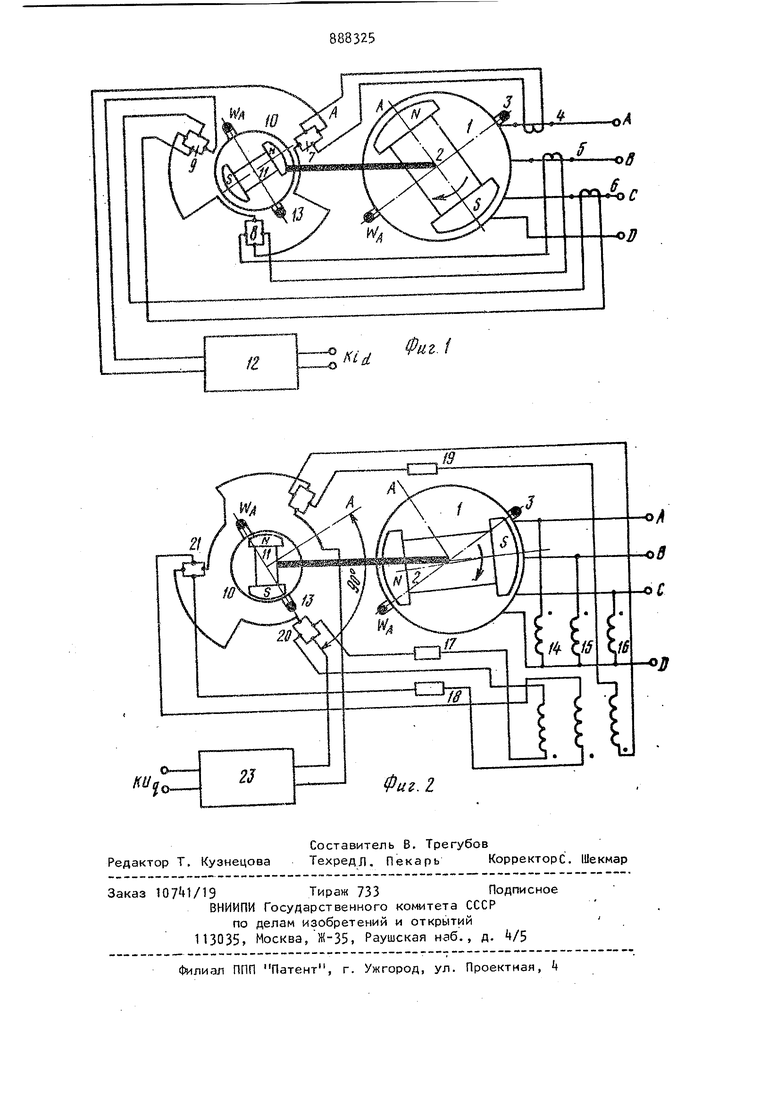
Изобретение относится к электрическим машинам и предназначено для измерения составляющих трехфазных систем токов и напряжений по осям ро тора при экспериментальном исследова нии синхронных электрических машин в переходных и установившихся симметричных и несимметричных режимах рабо ты при произвольных скоростях вращения, а также для выработки сигналое управления токами возбуждения асинхронизированных синхронных машин и для компаундирования измерительных о ганов систем возбуждения синхронных генераторов, именно, при создании ин вариантной системны регулирования напряжения (и вариантной по отношению к изменениям нагрузки). Известны синхронные машины с.устройством для измерения продольной и поперечных составляющих токов и напряжений D3, содержащие углоизмерительную машину с поворотным статором и ваттметр. Фаза углоизмерительной машины включена на обмотку напряжения ваттметра, а его токовая обмотка - в соответствующую фазу синхронной машины. При этом отсчет ваттметра пропорционален п, если ЭДС углоизмерительной машины и асинхронной машины синфазны на холостом ходу последнего, и , если статор углоизмерительной машины повернут на 90° (электрических) по отношению к положению синфазности ЭДС. Недостаток этой конструкции - невозможность ее использования в условиях несимметричной нагрузки синхронной машины. Известны также синхронные т-фазные машины с устройством измерения продольной и поперечной составляющих токов или напряжений 2, содержащие датчик углового положения ротора с индикатором, механически соединенным с валом синхронной машины, чувствительные .элементы, установленные на статоре датчика и подключенные выхода3ми к усилителям постоянного тока, тра сформаторы тока или напряжения, подключенные к фазам синхронной машины, техническое решение наиболее близко мэобретению по технической сущности и достигаемому эффекту, В зтом устройстве имеется двухфазная угяоизмеритеяьная машина. Для получения поперечиого тока перемножают токи и ЭДС соответствующих фаз для получения продольного тока перемножают ЭДС на то«и несоответствующих фаз двухфазной сйстек } токов. Недостатком этого устройства является невозможность его использования в несимметричных режимах вследствие ошибок, возникающих при преобразовании трехфазной системы токов в двухфазную, большие ошибки измерения в режимах скольжения и полная невозмож-. ность измерений в неподвижном состоя™ НИИ синхронной машины, громоздкость и ненадежность электронного оборудования, т.е. низкгш точность измерений Целью изобретения является повышение точности измерений в несимме ,тричных режимах, в условиях больших скольжений и при полном останове машины. Цель достигается тем, что чувстви тельные элементы выполнены в эл ментов Холла, соединенных s две груп пы с числим элементов Б каждой групп равным числу фаз машины и расположен .ных в группе по окружности через 2 J () электрических радиан друг относительно друга, где п - любое целое число или ноль, каждый элемент Холла одной группы подключен своими входными клеммами к вторичной обмотке соответствующего трансформатора тока или напряжения машины и в положении, когда ось его совпадает с про дольной осью индуктора датчика положения машины.ось той фазы машины, к которой он подключен посредством тра сформзтора тока, совпадает с продоль ной осью полюса ротора машины, одноименного по отношению к полюсу индук тора датчика, а каждый элемент Холла другой группы смещен от элементов Холла первой группы по расточке дат чика положения ротора на угол1Г/2 эл трических радиан по направлению вращения и также подключен к вторичной обмотке трансформатора тока или напряжения одноименных фаз, выходные к.пеммы элементов Холла соединены в каждой группе соглзсно-последователь 5 40 и подключены к входам своих усилителей постоянного тока. Валы датчика положения и синхронной машинь могут быть соединены посредством редуктора, а число пар полюсов датчика положения и синхронной машины выполнено по соотношению L л где Рд - число пар полюсов датчика положения , число пар полюсов машины, частота вращения датчика, частота вращения вала машины. На фиг. 1 представлена принципизль-. ная схема устройства для измерения продольной составляющей системы тока L трехфазной машины; на фиг. 2 - схема устройства для измерения поперечНОЙ составлящей напряжения U(. Синхронная электрическая машина 1, продольная составляющая токов которой подлежит измерению, содержит индуктор 2, обмотку 3 фазы, вторичные обмотки трансформаторов тока k, 5, &, которые под1спючены к элементам Холла 7 8 и 9, расположенным в зазоре датчика 10 положения, Ин/дуктор 11 датчика 10 положения соединен с синхронной машиной 1 . Элементы Холла 7, 8, 9размещены через 120° электрических, в местах, где равны углы, отсчитанные от осей элементов 7, Q, Э Холла и фазы синхронной машины 1, к трансформатору которой подключен данный элемент Холла 7. 8, 9j до продольных осей индуктора 11 датчика 10 положения и индуктора 2 синхронной машины 1 соответственно. На фиг. 1 угол между осью элемента Холла 7 и полюсом N индуктора 11 равен углу между осями фазы А-З ипопюс а N индуктора 2 синхронной машины 1, причем оба угла равны нулю. Элемент Холла 7.подключен к трансформатору тока k фазы 3 (А) синхронной машины 1. Электроды ЭДС Холла элементов Холла 7. 8, 9 соединены согпасно-последовательно и подключены к выходному усилителю 12 постоянного тока. Датчик 10 положения имеет многофазную тахометрическую обмотку, одна из фаз которой 13 показана на фи г. 1. Для измерения поперечной составляющей напряжения (U) синхронной машины 1, она содержит трансформаторы фазных напряжений Н, 15 и 16 подключенные через сопротивления 17 8 9 к второй группе элементов Холла 20, 21, 22, размещенным в зазоре датчика 10 положения через электрических в местах, смещенных по отношению расположению элементов Холла 7, 8, 9 на 90° электрических по положительному направлению вращения. И дуктор 11 датчика 10 положения механически соединен с индуктором 2 синхронной машины 1-; индуктор 2 синхрон ной машины 1 и индуктор 11 датчика 10 положения изображены повернутыми по отношению к положению, изображенному на фиг. 1, на некоторый угол. Электроды ЭДС Холла элементов Холла 20, 21, 22 соединены согласно-последовательно и подключены к усилителю постоянного тока 23Устройство для измерения тока сог ласно схеме, изображенной на фиг, 1 работает следующим образом. Максимум индукции над элементами Холла 7, 8, 9, измеряющими продольну составляющую системы токов т-фазной синхронной машины 1 (u), наступает в моменты, когда одноименные фазы синхронной машины 1 имеют максимально потокосцепяение. Следовательно, приняв за начало счета вре-ени момент максимума потокосцепления в фазе А (З), будем иметь ЭДС в цепи этой гру пы элементов Холла 7, 8, 9 (принято г 0)Еуд sKig 8rnCOS(jut+KigBvflCOs(uJt-120°) + +KioB cos(ujt-2 0 ) И мгновенные значения фа L где ,, ных токов; Вт амплитуда индукции под полюсом индуктора 11 д ат чи ка 10 пол оже ни я , - коэффициент пропорциональности, равный прои ведению постоянной эле мента Холла на коэффициент трансформации трансформаторов тока Известно (А.И. Важнов Электричес кие машины, Л., Энергия, 19б9 с. 673), что Li iCOSUJt4-igcos(iL t-120°) +tc.cos(a)) (2) Здесь, как и в формуле (1), отсче углов осуществляется от оси фазы А ( Ср.авнмаая (1) и (2), получаем 1 УЛ TJ-- ( Dri Т.е. сумма ЭДС Холла пропорциональна мгновенному значению продольной составляющей токов машины 1, Токи вторичных обмоток трансформаторов тока k, , 6 запитывают элементы Холла J, 8, 9, находящиеся . в магнитном поле индуктора 11 датчика 10 положения. В элементах Холла 7,. 8, 9 осуществляется перемножение фазных токов на мгновенные значения индукции поля индуктора 11 со сдвигом на 120 электрических, образующиеся благодаря размещению элементов Холла. ЭДС Холла элементов7. 8, 9 суммируется в последовательном соединении электродов ЭДС Холла элементов 7, 8, 9 и усиливается выходным усилителем постоянного тока 12. Аналогично для цепи, измеряющей ток iq, exq, K-iciBwSiniL t+K igB sindi; t-12CP)+K (ш ).fVj так как элементы 20, 21, 22 закреплены в точках, отстоящих от элементов 7, 8, 9 первой группы на 1Г/2 электрических радиан. (При изменении направления вращения знак .ЭДС меняется, как и знак id,)- Следовательно При изменении продольной и поперечной составляющих напряжений генератора, нужно запитать элементы Холла 20, 21, 22 от фаз вторичных обмоток 1, 15, 16 трансформаторов напряжения через ограничительные сопротивления 17, Т8, 19, с целью уменьшить угловую погрешность и повысить быстродействие измерителя. Устройство для измерения поперечной составляющей напряжения (ил), схе ма которого изображена на фиг. 2, работает вполне аналогично устройству, изображенному на фиг. 1, с той лишь разницей, что элементы Холла 20, 21, 22 запитываются токами, пропорциональными напряжениям фаз машины, получейными при помощи трансформаторов напряжения И, 15 и 16 и ограничительных резисторов 1,7, 18, 19В случае, если датчик 10 положения имеет число пар полюсов Рс,, отличающееся от числа пар полюсов Р синхронной машины 1, необходимо обеспечить синхронизм сигналов датчика 10 положения ротора с его фактическими положениями. Это может быть достигнуто при помощи редуктора, обеспечивающего ра.венство частот сигналов датчика положения и ЭДС синхронной машины 1. При этом должно быть выполнено соотношение: п Если датчик 10 положения ротора многополюсный то число элементов Холла в группе можно оставить равным числу фаз машины 1. При этом элементы Холла могут быть размещены на раз ных полюсных делениях, но обязательно в точках, отстоящих от определенных ранее на четное число полюсных де лений датчика 10 положения. При этом .появляется возможность разместить элементы Холла более равномерно и сво бодно. Датчик 10 положения может одновременно являться и тахогене-ратором, если его статор будет иметь соответствующие обмотки, устройство по данно му изобретению может иметь следующие технико-экономические, преимущества: отсутствует превращение многофазной системы токов (в данном случае трехфазной) в двухфазную, при котором воз никает ошибка в случае несимметрии системы токов. Это позволяет повысить точность измерения в несимметричных режимах ценою увеличения коли чества блоков произведения в устройстве, электронные блоки произведения заменены элементами Холла, Хояловские блоки проиЭведения осуществляют одновременно индикацию положения индуктора машины и перемножение фазных токов на магнитную индукцию в зазоре датчика 10 положения. Это совмещение функций элементов Холла позволяет значительно упростить измерительное устройство и одновременно расширить область его применения, обеспечив полную независимость результата измерений от скорости вращения машины, вплоть до полной ее остановки, тогда как известное устройство могло давать точные измерения только на синхронной скорости враще™ ния. формула изобретения 1. Синхронная ш-фаэная машина с устройством Для измерения продольной и поперечной составляющих токов или напряжений, содержащая датчик углово го положения ротора с индикатором, ме ханически соединенным с .валом синхрон ной машины, чувствительные элементы, установленные на статоре датчика и подключенные выходам к усилителям постоянного тока, трансформаторы тока или напряжения , подключенные к фазам синхронной машины, отличающаяся тем, что, с целью повышения точности измерения в несимметричных режимах, в условиях больших скольжений и при полной останове машины, чувствительные элементы выполнены в виде элементов Холла, соединенных в две группы с числом элементов в каждой группе, равным числу фаз машины и расположенных в группе по окружности через 2Х(1/го+п) электрических радиан друг относительно друга, где л - любое целое число или ноль, каждый элемент Холла одной группы подключен своими входными клеммами к аторичной обмотке соответствующего трансформатора тока или напряжения, и ось его совпадает с продольной осью индуктора датчика положения ротора машины, а ось той фазы машины, к которой он подключен посредством трансформатора тока, совпадает с продольной осью полюса ротора машины, одноименного по отношению к полюсу индуктора датчика, а каждый элемент Холла другой группы , смещен от элементов Холла первой группы по расточке датчика положения ротора на угол X /2 электрических рариан по направлению вращения и также подключен к вторичной обмотке трансформатора тока или напряжения одноименных фаз, выходные клеммы элементов Холла соединены в каждой группе согласно-последовательно и подключены к входам своих усилителей постоянного тока, 2. Устройство по п. 1, отличающееся тем, что датчик положения снабжен редуктором, а число пар полюсов датчика поло хения по отношению к числу пар полюсов синхронной машины выполнены в соотношении - л Р л где Р - число пар полюсов датчика положения J Р - число пар полюсов машины; п - частота вращения датчика; п - частота вращения вала машины. Источники информации, принятые во внимание при экспертизе 1.KapdOB Г.В. Метод экспериментального определения параметрических характеристик синхронных машин из рабочих режимов. Труды ЛПИ им. Калинина № 209, ГЗИ, М. Л., I960, с. . 2,Авторское свидетельство СССР кл. И 02 Р 9/10, 1950.
