1 V;
Изобретение относится к машиностроению, а именно к конструкциям винтовых прессов.
Известен винтовой пресс, с одержащий станину, в направляющих которой смонтирован ползун с установленной в нем с возможностью вращения гайкой, свинчивающейся с ходовым винтом, несущим на своем конце маховик, соединенный с приводом, а также пуансон и закрепленную на станине матрицу 1.
В известном устройстве деформирование заготовки осуществляется при поступательном движении ползуна, приводимого в действие посредством винтового механизма от привода.
Недостаток известного устройства заключается в том/ что его конструкция не обеспечивает перемацения пуансона в горизонтальной плоскости, необходимого для обрезки кромок, забуртовки и некоторых других операций при обработке полых деталей.
Цель изобретения - расширешие технологических возможностей устройства за счет возможности обработки полых детсшей.
Это достигается тем, что предлагаемой пресс снабжен подпятником и
механизмом пуансона, выполненным в виде корпуса с регулируемым тормоз ом, эксцентриковой шайбой, криволмпнь1М пгшьцем и сухарем, при этом в отверстии шай«йл размещен кривошипный палец, на цилиндрической поверхности которого выполнен выступ и закреплен сухарь, корпус установлен на подпятнике в
10 ползуне с возможностью вращения и радиального перемещения в плоскости, перпендикулярной к оси ходового винта, и на нем закреплен пуансон, кривошипный палец жестко соединен с
15 гайкой ползуна, а ходовой винт смонтирован с возможностью вращения в станине. Пресс снабжен регулируемыми упорами, закрепленными на ползуне.
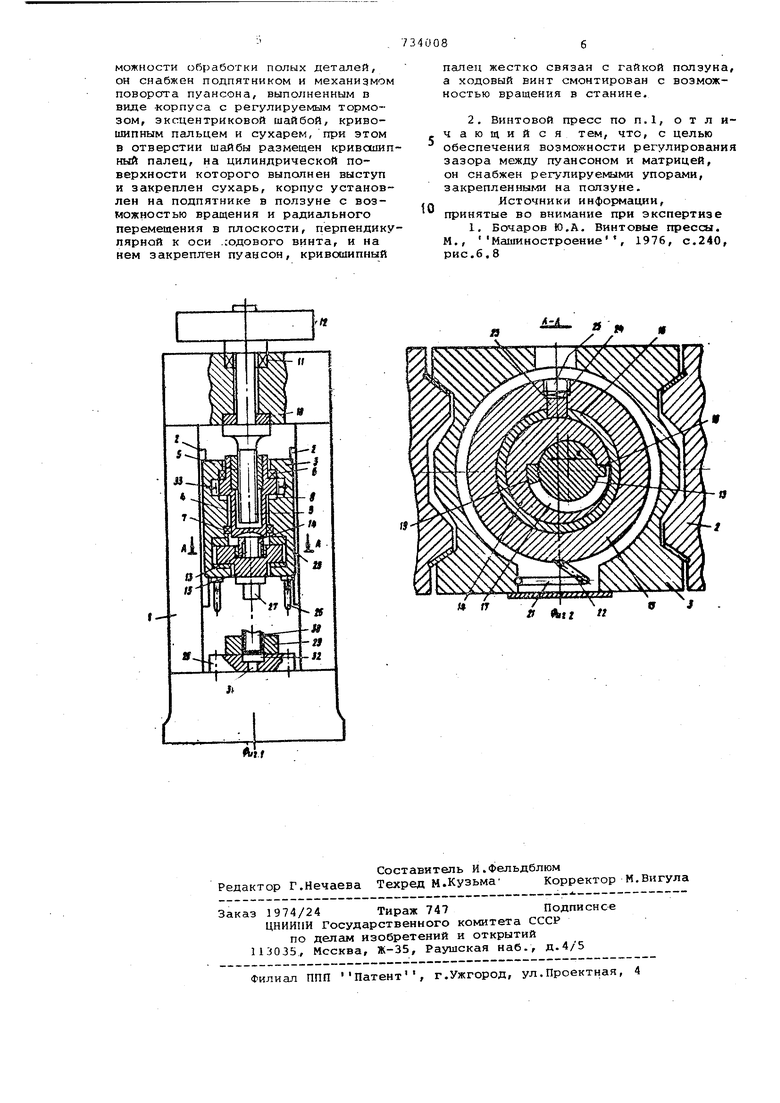
20 На фиг.1 показан предпагаелыя пресс; на фиг.2 - разрез А-А на фиг.1.
Пресс содержит станину 1, в направляющих 2 которой установлен
25 ползун 3, во внутренней полости последнего находится корпус 4 гайки 5.Корпус 4установлен в ползуне 3 в подиипниках 6 и 7 и подпятнике 8, Гайка 5 взаимодействует с ходовым
30 винтом 9, установленным в подпятпике 10 и подшипнике 11 станины 1 II снабженным маховиком 12, установленным в верхней части ходового линта 9. К HHJKnejvti. торцу корпуса 4 крепится кривошипный палец 13, име ющий эксцентриситет 2 по отношению к корпусу 4, который взаимодействует эксцентриковой шайбой 14, устаноа пениой в корпусе 15 с нозможностью .вращения э направляющей втулке 16. Ось вмутрэннего отверстия эксцентриг:о эой шгШбы 14 смещена относительно оси ее наружной цилиндрической поверхности также на величинуg . В отверстии эксцейтриковой шайбы 14 вгыполнен паз 17, в котором может перемещаться выступ 18 криветиипного пальца 13, Для ограничения угла поворота эксцентриковой шайьы 14 в пазу 17 расположен сухарь 1Э. Корпус 15 установлен на подпятниках 20 к имеет ограничитель угловых пере вщений, выполненный в виде двух тяг 21 и 22, Для создания сопротивления вращению эксцентриковой шайбы 14 относительно втулки 16 и корпуса 15 в последнем установлен тормоз 23, прижимаемой пружиной 24, регулируемой винтом 25. В нижней части ползуна 3 крепятся регулируемые упоры 26. На корпусе 15 закрепле пуансон 27, а на столе 28 пресса - матрица 29. Для удаления детали 30 из матрицы 29 в столе пресса смонтированы выталкиватель 31 с толкателем 32, Для торможения гайки 5 предусмотрен тормоз 33,
Пресс работает следующим образом.
в исходном положении ползун 3 находится вверху, кривошипный палец 13 и эксцентриковая шайба 14 находятся друг относительно друга (как показано на фиг,2). Корпус 15 и связанный с ним пуансон 27 занимают соосно с ползуном 3 положение. Деталь 30 установлена -в матрице 29, а упоры 26 настроены таким образом, чтобы при подходе ползуна 3 и корпу;С а 15 к крайнему нижнему положению торцовый зазор между пуансоном 27 и матрицей 29 соответствовал оптимальному режиму резания детали 30. При включении привода пресса маховик 12 и связанный с ним ходовой винт 9 начинают ускоренно вращаться. Корпус 4 и гайка 5 не вращаются, так как корпус 4 заторкюжен управляемым тормозом 33. Гайка 5 свинчивается с ходового винта 9 и перемещается вниз вместе с корпусом 4 и связанным с ним ползуном 3, При по,дходе к крайнему нижнему положению упоры 26 упираются в стол 28, и ползун 3 останавливается. Пуансон 27 заходит во внутреннюю полость детали 30.
Так как гайки 5 поступательного перемещения вниз не имеет, то она начинает вращаться с той же скоростью что и ходовой винт 9.Тормоз 33
который тормозил корпус 4, отключен. Начинает вращаться корпус 4 и связанный с ним кривошипный палец 13. Так как эксцентриковая шайба 14 приторможена тормозом 23, то в первоначальный момент происходит вращение кривошипного пальца 13 относительно эксцентриковой шайбы 14. Ось корпуса 15 смещается относительно оси пресса и матрицы 29, а сам корпус совершает радиальное перемадение, в связи с чем пуансон 27 выбирает зазо между деталью 30, а затем внедряется в нее. Радиальное перемещение корпуса 15 прекращается когда выступ 1В доходит до сухаря 19. С этого момента корпус 4, кривошипный палец 13, эксцентриковая шайба 14 и корпус 15 вращаются как одно целое. При этом корпус 15, а следовательно, и пуансон 27 вращаются с некоторым эксцентриситетом относительно оси пресса. Максимальная величина этого эк;сцентриситета составляет при отсутствии сухаря 1926 , когда выступ 18 повернется относительно эксцентриковой шайбы 14 на 180. Происходит постепенная отрезка торцового припуска, забуртовка фланца или раздача детали 30. Угол поворота корпуса 15 ограничивается тягами 21 и 22.
Возникающее при резке распорное усилие Рр , действующее на пуансон 2 не приводит к увеличению зазора между пуансоном 27 и матрицей 29, так .как ползун 3 прижимает упсры 26 к поверхности стола 28. Усилие прижима Pf, равно реакции в резьбе винтовой пазы ходовой винт 9 - гайка 5 и зависит от угла наклона резьбы диаметра винта D и момента М, возникающего на кривошипном пальце 13 в момент операции обрезки::
р р - Ч Р п Btg-c
После окончания операции обрезки дэтали подвижные части реверсируются Кривошипный палец 13 поворачивается в противоположном направлении относительно эксцентриковой шайбы 14 и занимает положение, показанное на фиг.2. Корпус 4 затормаживается тормозом 33, и происходит подъем ползуна 3 в крайнее верхнее положение. Цикл закончен.
Формула изобретения
1, Винтовой пресс, содержащий станину, в направляющих котсчрой смонтирован ползун с установленной в нем с возможностью вращения гайкой, свинчивающейся с ходовым винтом, несущим на своем конце маховик соединенный с приводом, а также пуансон и закрепленную на станине . матрицу, отличающийся тем, что, с целью расширения технологических возможностей за счет возможности обработки полых деталей, он снабжен подпятником и механизмом поворота пуансона, выполненным в виде -корпуса с регулируемым тормозом, эксцентриковой шайбой, кривошипным пальцем и сухарем, при этом в отверстии шайбы размещен кривошипньгй палец, на цилиндрической поверхности которого выполнен выступ и закреплен сухарь, корпус установлен на подпятнике в ползуне с возможностью вращения и радиального перемещения в плоскости, перпендикулярной к оси .:одового винта, и на нем закреплен пуансон, кривошипный
палец жестко связан с гайкой ползуна, а ходовый винт смонтирован с возможностью вращения в станине.
2, Винтовой пресс по п.1, отличающийся тем, что, с целью обеспечения возможности регулирования зазора между пуансоном и матрицей, он снабжен регулируемыми упорами, закрепленными на ползуне.
Источники информации, принятые во внимание при экспертизе
1. Бочаров Ю.А. Винтовые прессы. М., Машиностроение, 1976, с.240, рис.б.8
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой пресс двойного действия | 1977 |
|
SU658005A1 |
| Винтовой пресс | 1980 |
|
SU944949A1 |
| Винтовой пресс для штамповки обкатыванием | 1988 |
|
SU1613358A1 |
| Винтовой пресс двойного действия | 1981 |
|
SU1027056A1 |
| Винтовой пресс двойного действия | 1980 |
|
SU927556A1 |
| ПРЕСС-АВТОМАТ ДЛЯ ДВУСТОРОННЕГО \ ХОЛОДНОГО ВЫДАВЛИВАНИЯВПТБ[^ ^^.'." 'з T't Г Г" Т f " .•' ''' '.'.. •;' iT' (^ 5 * | 1971 |
|
SU424647A1 |
| Винтовой пресс двойного действия | 1979 |
|
SU854740A1 |
| Винтовой пресс | 1980 |
|
SU897585A1 |
| Винтовой пресс | 1980 |
|
SU956299A1 |
| Винтовой пресс двойного действия | 1983 |
|
SU1147593A1 |
