(54) ДИНАМОМЕТР ,
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ ВЕКТОРОВ АЭРОДИНАМИЧЕСКОЙ СИЛЫ И МОМЕНТА | 2005 |
|
RU2287795C1 |
| Устройство для измерения нагрузок на лыже | 1984 |
|
SU1216681A1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| АВТОМАТИЧЕСКИЙ СПОСОБ ИСПЫТАНИЯ НА ВЫНОСЛИВОСТЬ ЧЕТЫРЕХ ПОДКРАНОВЫХ БАЛОК В СТЕНДЕ | 2009 |
|
RU2419081C2 |
| СИЛОИЗМЕРИТЕЛЬНАЯ ПЛАТФОРМА | 1991 |
|
RU2037794C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1997 |
|
RU2113373C1 |
| НАГРУЗОЧНАЯ ПЛАТФОРМА ДЛЯ ТЯГОВЫХ ИСПЫТАНИЙ МАШИН | 2019 |
|
RU2729894C1 |
| Тензометрический динамометр | 1986 |
|
SU1606884A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2000 |
|
RU2181194C2 |

I
Изобретение относится к измерительной технике и может быть использовано при измерении усилий.
Известный динамометр, содержащий основание и платформу, соединенные между собой опорами и датчиком силы, балансирное устройство, перемещающее опоры, не обеспечивает требуемой точности измерения усилий 1.
г ..Наиболее близким по технической сущности к предлагаемому является динамометр, содержащий основание и плат форму, соединенные между собой опорами, и датчик силы 2 .. ;
К недостаткам известного динамометра относится низкая точность измерения усиЛИЙ.
Цель изобретения - повыщение точности измерения.
Для этого в предлагаемом устройстве каждая опора выполнена в виде двух смежных идентичных упругих балок, при этом точки крепления этих балок к основанию расположены в двух плоскостях, совпадающих с плоскостью крепления смежной балки к платформе., , /
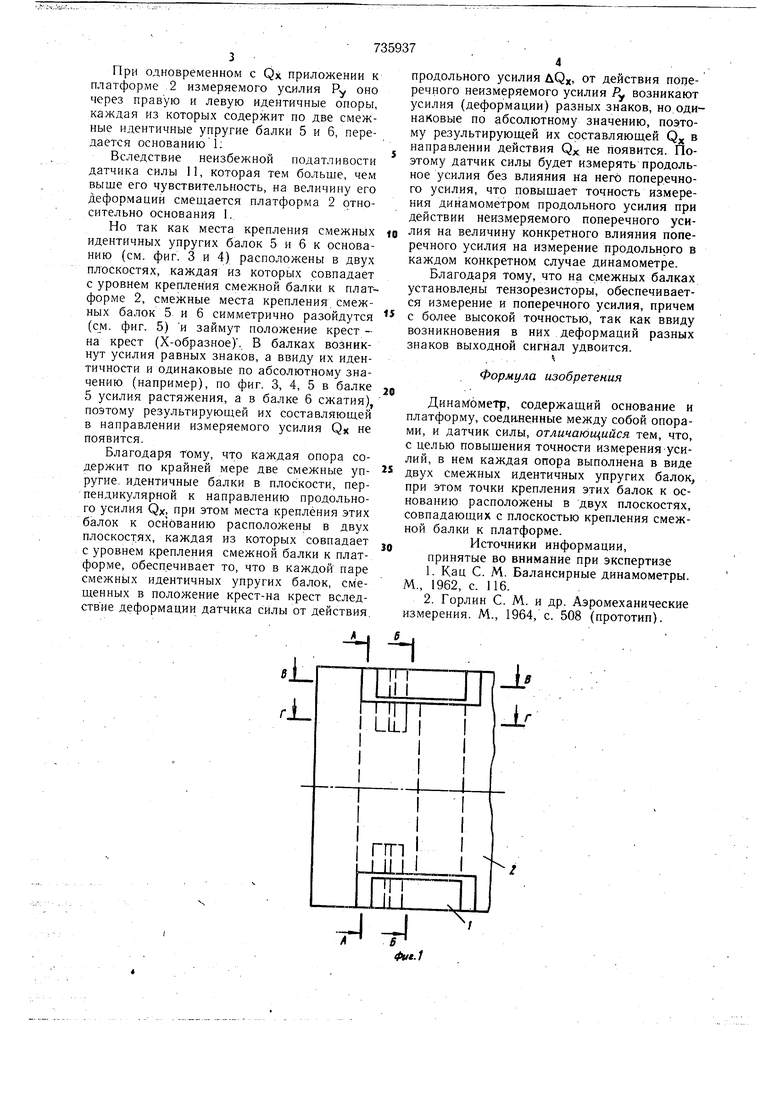
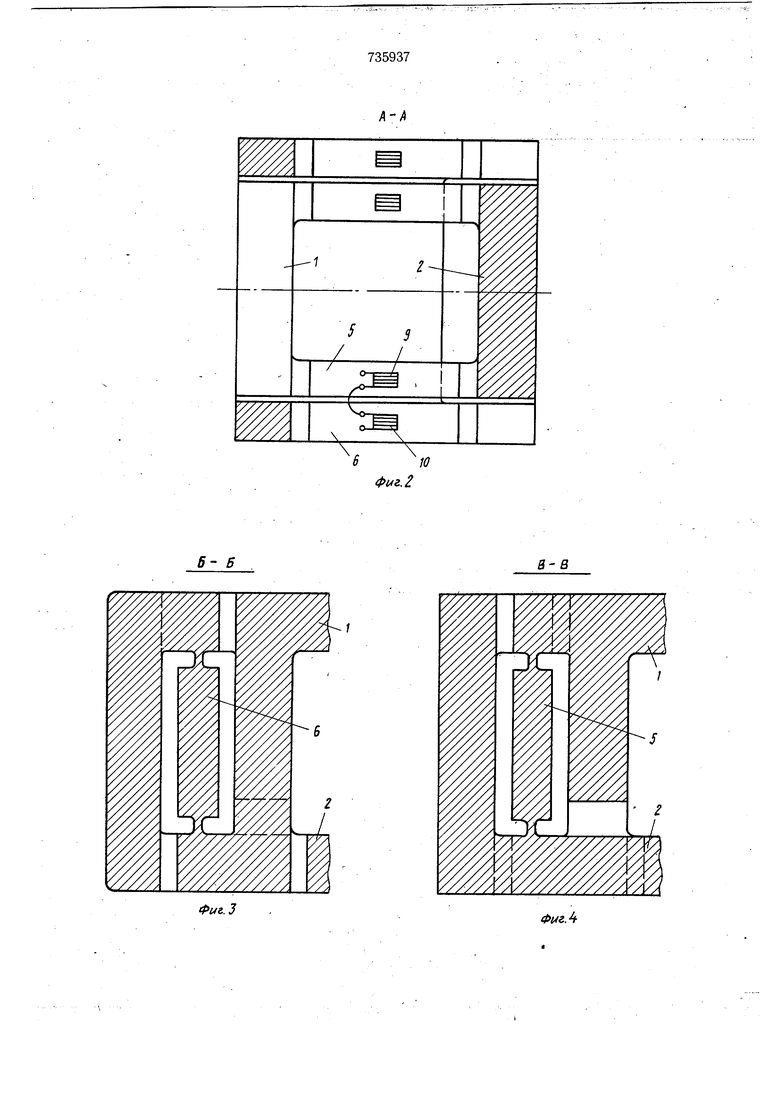
На фиг. 1 изображены опоры динамометра, вид в плане; на фиг. 2- то же, разрез - А-А на фиг. 1 в ненагруженном состоянии; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4- разрез В-В на фиг. 1; на фиг. J 5 - разрез В-В в деформированном от действия продольного усилия состояния; на фиг. 6 ;- предлагаемый динамометр, общий вид.
Основание 1 и платформа 2 динамометра соединены между собой левой 3 и правой 4 опорами, каждая из крторых содержит две смежные идентичные упругие балки 5 и 6 в плоскости, перпендикулярной к направлению измеряемого продольного усилия. Точки крепления этих балок к основанию расположены в двух плоскостях 7 и 8, каждая из которых совпадает с уровнем крепления смежной балки к платформе 2. На смежных балках 5 и 6 могту быть установлены тензорезисторы 9 и 10. Основание
Iсоединено с платформой 2 датчиком си20 лы 11 по направлению измеряемого им усилия QX.
При приложении к платформе 2 измеряемого усилия QX оно через датчик силы
I1передается основанию 1.
При одновременном с Qx приложении к платформе 2 измеряемого усилия Ру оно через правую и левую идентичные опоры, каждая из которых содержит по две смежные идентичные упругие балки 5 и 6, передается основанию 1:
Вследствие неизбежной податливости датчика силы II, которая тем больше, чем выше его чувствительность, на величину его деформации смеш,ается платформа 2 относительно основания 1.
Но так как места крепления смежных идентичных упругих балок 5 и 6 к основанию (см. фиг. 3 и 4) расположены в двух плоскостях, каждая из которых совпадает с уровнем крепления смежной балки к платформе 2, смежные места крепления; смежных балок 5 и 6 симметрично разойдутся (см. фиг. 5) и займут положение крест на крест (Х-образное). В балках возникнут усилия равных знаков, а ввиду их идентичности и одинаковые по абсолютному значению (например), по фиг. 3, 4, 5 в балке 5 усилия растяжения, а в балке 6 сжатия), поэтому результирующей их составляюш,ей в направлении измеряемого усилия Qx не появится.
Благодаря тому, что каждая опора содержит по крайней мере две смежные упругие, идентичные балки в плоскости, перпендикулярной к направлению продольного усилия QX, при этом места крепления этих балок к основанию расположены в двух плоскостях, каждая из которых совпадает с уровнем крепления смежной балки к платформе, обеспечивает то, что в каждой паре смежнь1х идентичных упругих балок, смещенных в положение крест-на крест вследствие деформаций датчика силы от действия.
продольного усилия AQx, от действия noijeречного неизмеряёмого усилия Ру возникают усилия (деформации) разных знаков, но одинаковые по абсолютному значению, поэтому результирующей их составляющей Q в направлении действия Qx не появится. Поэтому датчик силы будет измерять продольное усилия без влияния на него поперечного усилия, что повыщает точность измерения динамометром продольного усилия при действии неизмеряемого поперечного усилия на величину конкретного влияния поперечного усилия на измерение продольного в каждом конкретном случае динамометре.
Благодаря тому, что на смежных балках установлены тензорезисторы, обеспечивается измерение и поперечного усилия, причем с более высокой точностью, так как ввиду возникновения в них деформаций разных
знаков выходной сигнал удвоится.
Формула изобретения
Динамометр, содержащий основание и платформу, соеданенные между собой опорами, и датчик силы, отличающийся тем, что, с целью повышения точности измерения усилий, в нем каждая опора выполнена в виде двух смежных идентичных упругих балок, при этом точки крепления этих балок к основанию расположены в двух плоскостях, совпадающих с плоскостью крепления смежной балки к платформе.
Источники информации,
принятые во внимание при экспертизе
Л, б,
1 -J
//
5 3
5 o
.2
S,
/
//
/ /
У 2 Фиг. 6
