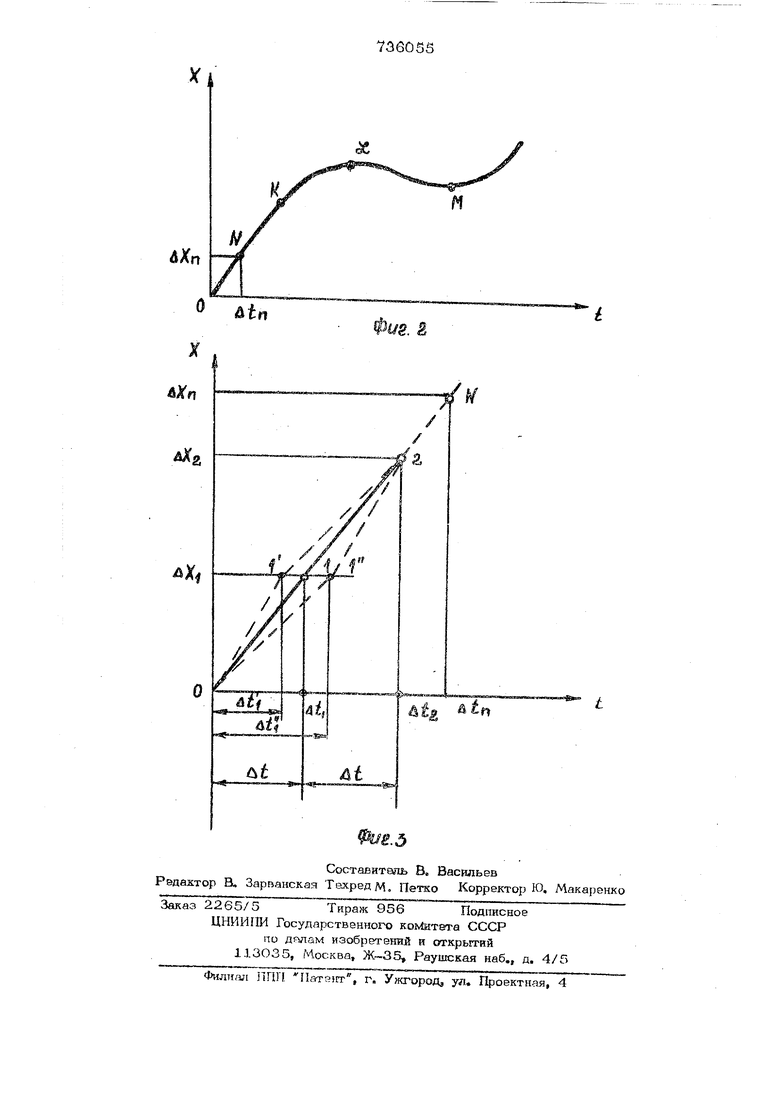
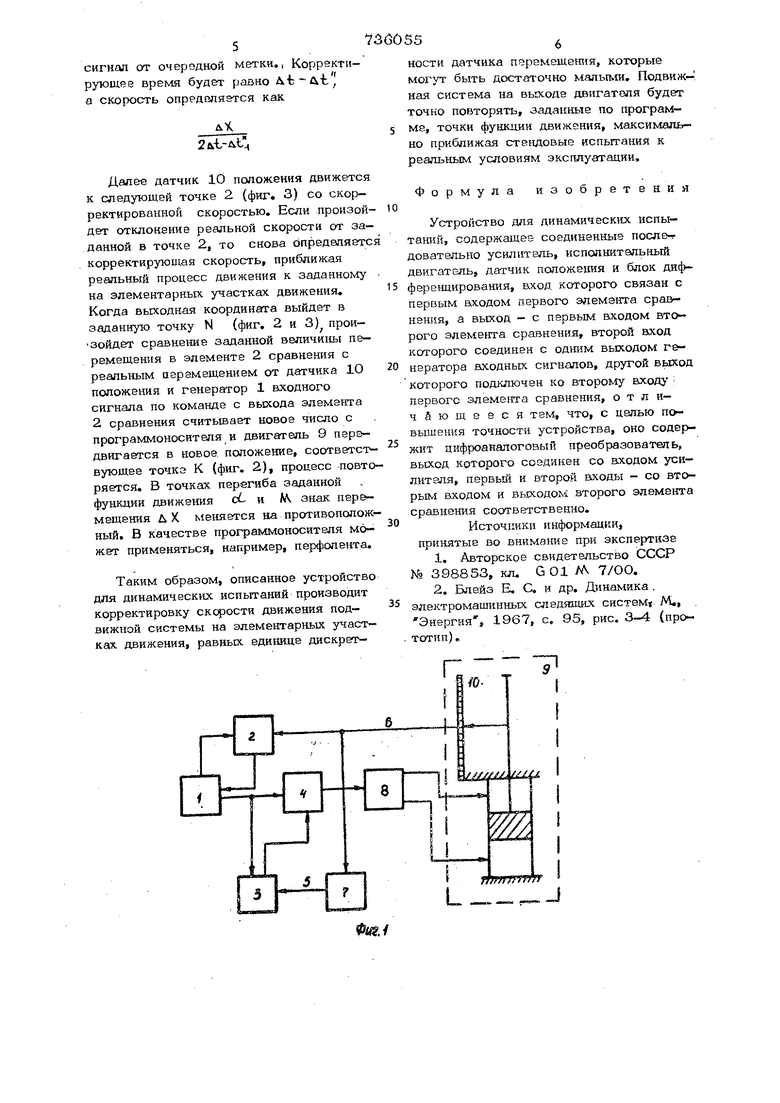
Изобретение относится к автоматике, в частности к регулированию маханичес- ках колебаний с использованием электри ческих средств, и может найти применен для различных видов виброиспытаний и нагружателей, например для сте1щовых испытаний подвесок транспорттгых средст по заранее записанному и синхронизированному профилю дороги. Известно устройство для динамически испытаний, содержащее генератор аходно го сигнала, многоканальный гидроусилитель с электрическим управлением, норш Н9ВОЙ гидросервомотор с источником ни- тания, цепь отрицательной обратной свя- зи по положению подвижной системы гидросервомотора, источник постоянного регулируемого напряжения, цепь отрицательной обратной связи по ускорению подвижной системы гидросервомотора, блок двойного интегрирования и преобра.зователь давления |l. Однако это устройство не обеспечивает достаточной точности воспроизвед&ния заданной функции движения, так.как содержит аналоговые датчики и усилители, имеет многоканапьньй гидроусилитель, который может накапливать ошиб- .ку в кансдом канале. Наиболее близким к изобретению тах- ническим решением является устройство для динамическах испыта {ий, содержащее соединенные последовательно зС 5литепь, исполнительный двигатель, датчик положения и блок дифференцирования, аход которого связан с первым входом первого элемента сравнения, а выход - с первым входом второго элеме гга сравнения, второй вход которого соединен с одним выходомгенвратора аходных сиг- налов, другой выход которого подключен ко второму ьходу первого элемента сравнения 2.j, В известном устройстве вырабатывается управляющий сигнал, пропорцио нальный производной ошибки рассогласо- ваю1Яе Теоретически можно обеспечить Выполнение условий инвариантности ошибки по отношению к уп|заоляю. воздействию Однако в реальных устрорствах нмэо место различных. парам ;ггрсз (люфты и унругая де(|)Орма:,1Ия в jviaxaнизмах, зона нечувствительности темг чтературные нестабштьности и дрейф нуля в электрических устройствах), которые все более сказываются нри умеШзШении ошибки рассогласования. Увеличение коэффициента усиления устройств шает помехозащищенность и. устойчивость системы, что требует введения допохигательных корректир; то1Щ1Х звеньев и мало эффективно при отработке о ,гпо сительно высоких частот Кромо того, в этих системах при реаки.х изменеикг-Х момента нагрузки имеет место зпа-хительное увеличение ошибки Цель изобретения- повьп.иение точно ти устройства Эта цель достигается Taivij ЧТ1Э оно содержит цифро-аналоговый преобр-ззова твя-ъ, выход которого соединен ее входо усилитейя, первый и второй входт:, - с вторым В.ХОДОМ и выходом BTOpoio элемента сравнения сош-ветственно. На фиго 1 пp9дcтaJBJIeнa блок-с.хэма .устройства на фиг, 2 .- график гадан- рой функции движения на фиг., 3 -- гра-фик корректировки движения испо,11китель него двигателя Устройство содерлсит генератор 1 - входного сигнапээ элэменты 2 и 3 сраз нения цифро-аналоговый пр еобраз ов а:т ель или источник регулируемого напряжения 4, цепь 5 отрицательной обратной св5тзи по скорости, цепь 6 обратной с.вязи по положению исполнительного двигате.ття, бло 7 дифференцирования, усштитель 8;. исполи тояьный двигатель 9. датчик 1О гюп:ожения Устройство работает спед -токим об- paaoNij По сигналу пуска генератор .1. вход ноге сигнала 1 с программоносиселя считывает первое число,, состоящее кз двух слов, и записьшаст VK в ззлокга- нающие регистры., IlepBoiviy слову осот™ ветс-твует величина А.К y-j изменения выходной координаты двигателя (нафиГв2 и 3 точка Н), второму стюву - .величина отрезка времеш и.4. (точка 1 к: точка Д.: , по оси времош на фиг 3.1 Пер вое слово из запоминающего регистра с выхода генератора 1 входного сигнал транслируется на вход элемента 2. срав .нения, второе с-лоьо с другого Bi,cx.oiia генератора 1 аходного сигнала транслируется на в.ход элемента 3 сравнения и на вход источника 4 постоянного регулируемого напряжения. На аходе источника 4 постоянного регулируемого напряжения .второе слово преобразуется в величину равную , где ЛХ - величина соответствующая минимальной единице дискретности датчика 10 положения,является постоянной. At - величингэ приращения времени перемещения на единице дискретности. Источник 4 постоянного регулируемого напряжения, выполненный в виде дйфроаналогового преобразователя, вырабатывает выходное напряжение, цифровой код которого и управляющее воздействие, подаваемое с выхода источника 4 постоянного регулируемого напряжения на аход усилителя 8 соответствует- заданной скорости выходной координаты двигателя S. Как только датчик 1О положения приходит в движение, сигнал с него от считанной первой метки, соответствутажий минимальному перемещению датчика Ю по-ложения (на фиг, 3 АХ ), поступает по цепи обратной связи по положению на вход бло.ка 7 дифферет ирования, в котором отсчитывается реальное время пере мещения двигат-еля 9, Если сигнал от очередной метки придет раньше (точка 1 на фиг,. 3), чем сравнится заданное время перемещения транслируемое на элемент 3 сравнения с генератора 1 аход-ного сигнала с реальным временем от- c4:4TbiBaeMbmi в блоке 7 дифференцироваНИ51 к подаваемым на второй вход элемента 3 сравнения по цепи отрицат-вльной обратной связи по скорости 5 (предположим, реальное время соответствует точке д -с на фиг„ 3)э то вычисляется ксрректируюш.ее время, равное& -Л.Ьц и в виде поправочного кода подается на второй, вход источника 4 постоянного регулируемого напряжения. Скорость на участке 1-2 (фиг. 3} определяется в виде .отношениям й. 2at-&t/ г/де цХ. величина, соответствующая минимальной единице дискретности выходной к. координаты, и является постояннойв Если заданное время перемещения д, сравнится с текущим реаль 1ым временем разшше чем приде.г сигнал от очередной метки (точка 1 на фиг. 3), то досчитывается реальное допачнительное . ьш до те7 nopf пека не. поступит этот сигнал от очеродкой метки.. Корректирующее время будет равно Л-Ь-лЪ а скорость опредЕЖяется как 2лг-лЬ, Далее датчик 10 положения движется к следующей точке 2 (фиг, 3) со скорректированной скоростью. Если произой дет отклонение реальной скорости от заданной в точке 2, то снова определяетс корректирующая скорость, приблинсая реальный процесс движения к заданному на элементарнык участках движения. Когда выходная координата выйдет в заданную точку N (фиг. 2 и 3) произойдет сравнение заданной величины перемещения в элементе 2 сравнения с реальным перемещением от датчика 1О положения и генератор 1 аходного сигнала по команде с выхода элемента 2 сравнения считьшает новое число с программоносителя и двигатель 9 передвигается в новое, положение, соответсту вующее точке К (фиг. 2), процесс повто ряется. В точках перегиба заданной функции движения с и знак перемещения t X меняется на противополож ный. В качестве программоносителя может применяться, например, перфолента. Таким образом, описанное устройство для динамических испытаний производит корректировку скфости движения подвижной системы на элементарных участ ках движения, равных единице дискретт
Г, ности датчика перемешешш, которые могут быть достаточно малыми. Подвкжная система на выходе двигателя будет точно повторять, заданные по программе, точки функции движения, максимально приближая стендовые испытания к реальным условиям эксплуатации. Формула изобретения Устройство для динамических испы- TBHiift, содержащее соединенные после- довательно усилитель, исполнительный двигатель, датчик положения и блок диффере1щирования, аход которого связан с первым аходом первого элемента сравнения, а выход - с первым аходом второго элемента сравнения, второй аход которого соединен с одним выходом генератора входных сигналов, другой выход которого подключен ко второму первого элемента сравнения, отличающееся тем, что, с цепью повышения точности устройства, оно содержит цифроаналоговый преобразователь, выход которого соединен со аходом усилителя, первый и второй аходы - со вторым ьходом и выходом второго элемента сравнения соответственно. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 398853, кл. G О1 М 7/ОО, 2.Блейз Е. С. и др. Динамика . электромашинных следящих систем М,, Энергия, 1967, с, 95, рис. 3-4 (прототип).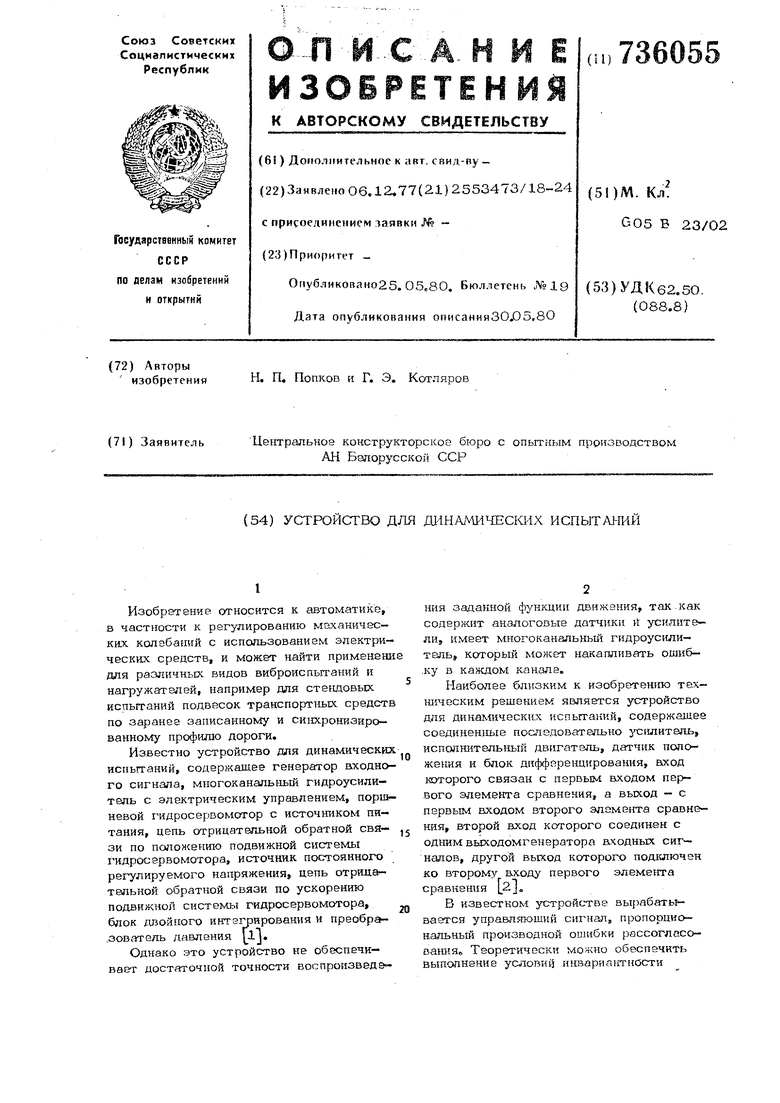
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ВИБРОСТЕНД;;:;0:п:РТ08 | 1973 |
|
SU398853A1 |
| Устройство для получения стабильного напряжения переменного тока | 1978 |
|
SU736065A1 |
| Устройство для динамических испытаний | 1980 |
|
SU922343A2 |
| Электроннолучевое устройство для измерения параметров вибраций лопаток рабочего колеса турбомашины | 1974 |
|
SU735931A1 |
| Стохастический функциональный преобразователь | 1978 |
|
SU734720A1 |
| Устройство для сопряжения вычислительной машины с импульсными датчиками | 1977 |
|
SU732844A1 |
| Аналоговое запоминающее устройство | 1976 |
|
SU639022A1 |
| Программно-логический регулятор | 1977 |
|
SU714357A1 |
| Устройство для контроля выхода на режим источника электропитания | 1978 |
|
SU736073A1 |
| Пробоотборник | 1978 |
|
SU733648A1 |