(54) УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамических испытаний | 1977 |
|
SU736055A1 |
| МАШИНА ДЛЯ ИСПЫТАНИЙ МАТЕРИАЛОВ ПРИ РАСТЯЖЕНИИ И СЖАТИИ | 1973 |
|
SU378751A1 |
| Гидравлический импульсный приводК ХОлОдНОВыСАдОчНОМу АВТОМАТу | 1979 |
|
SU837534A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Способ управления амплитудой выходного сигнала вибрационного источника сейсмических сигналов и устройство для его осуществления | 1983 |
|
SU1163289A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| Система управления пилотажного стенда консольного типа | 1990 |
|
SU1774369A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
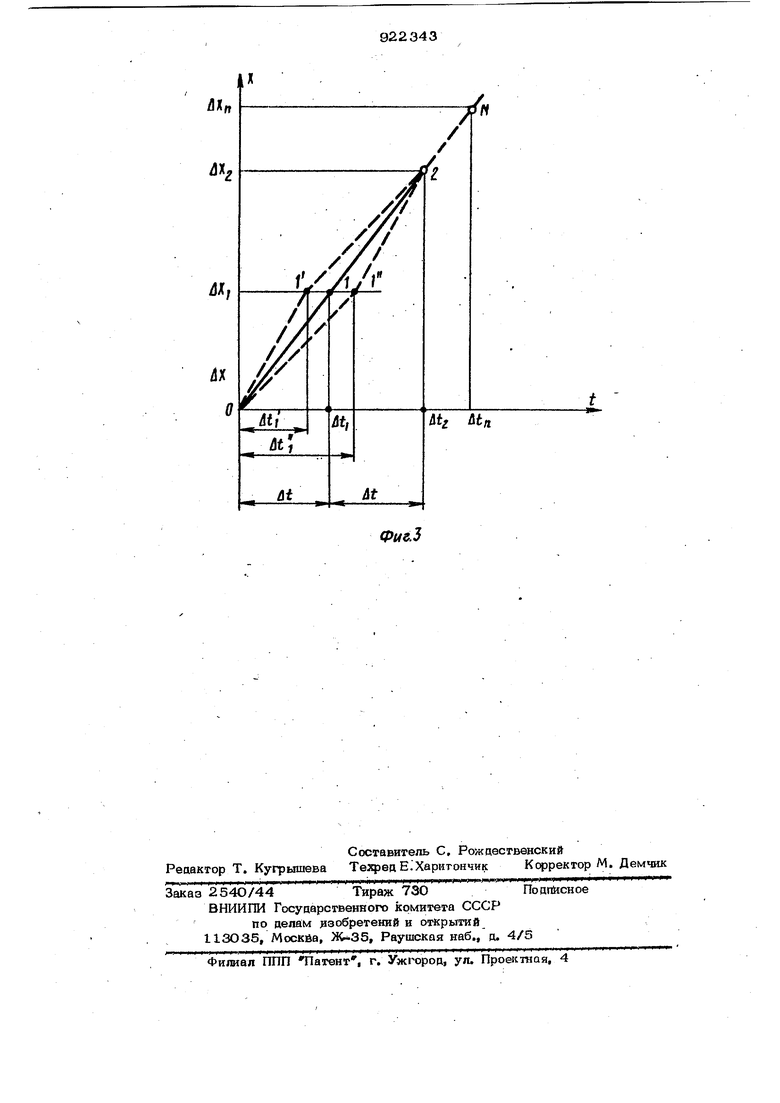
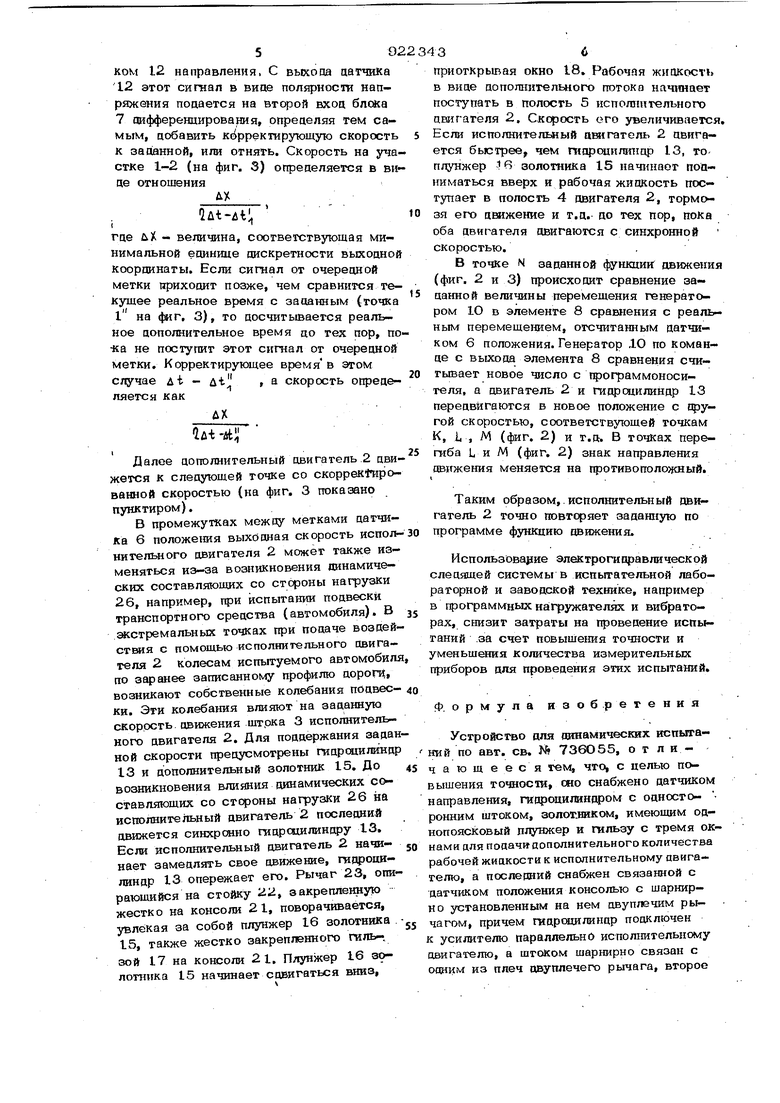
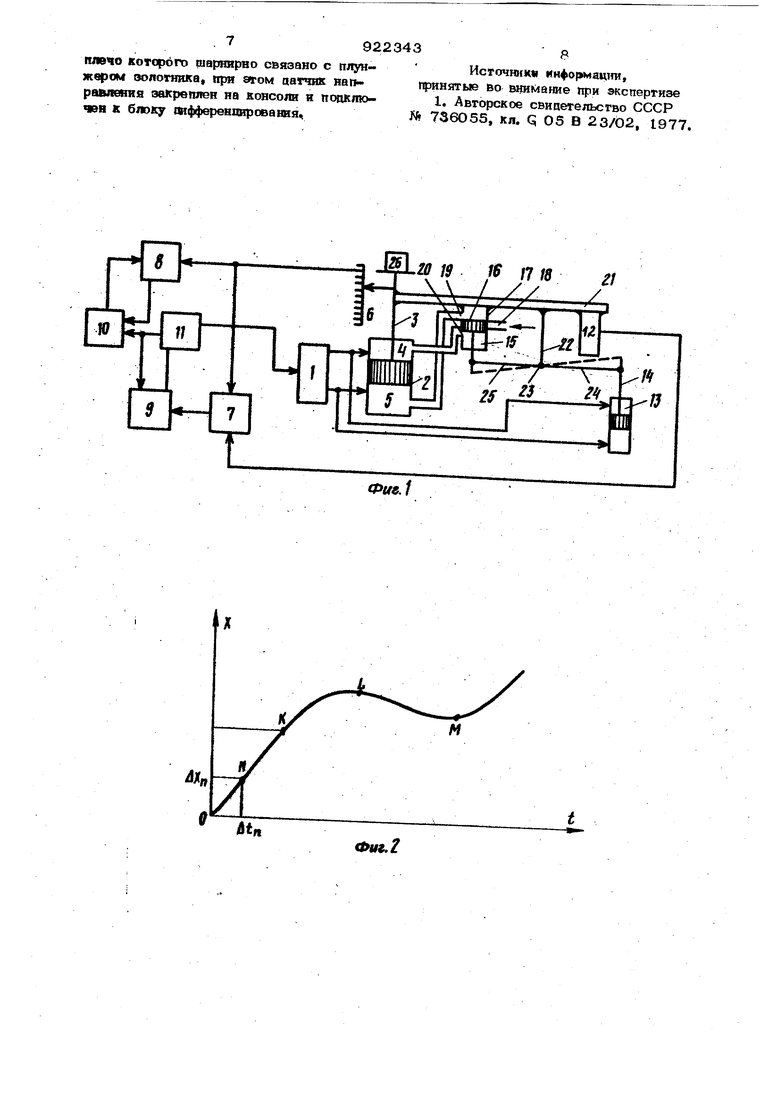
I - Изобретение относится к гнщзоавтоматике, и испытателышй технике и может быть использовано, например, в програм мных нагружателях и вибратфах, а также в следящих электрогицравлических при водах систем программного управления. По основному авт. св. N 736055 известно устройство, для динамических испытаний, содержащее соединенные поспедовательно усилитель, исполнительный двигатель, датчик положения и блок дифференцирования, вход котфого связан с первым входом первого элемента сравнения, а выход - с цервым входом второго элемента сравнения, втфой вход которого соединен с одним выходом генератора входных сигнале, другой выход которого подключен к второму входу первого Элемента сравнения, а также кифроанало гх)Вый преобразователь, выход которого . соединен с входом усилителя, первый и второй входы - с втфым входом и выходом второго элемента сравнения соответственно 1 . Недостатком известного устройства является малая точность. Цель изобретения - повышение точности. Указанная цель достигается тем, что устройство снабжаю датчиком направления, пгдроцишндром с односторонним штоком, золотником, имеющим, однопоясковый плунжер и гильзу с тремя окнами для по- дачи дополнительного количества рабочей жидкости к исполнительному двигателю, а последний снабжен связанной с датчиком положения консолью с закрепленным на нем двуплечим рычагом, причем гидроцилиндр подклгочен к усилителю параллель-, но исполнительному двигателю, а штоком шарнирно связан с одним из плеч двуплечего рычага, втфре плечо котфого шарнирно связано с плунжером, золотника, при этом направления закреплен на коНсоли и подключен к блоку дифференцирования. На фиг. 1 изображена структурная схема устройства для динамических испытаний; на фиг, 2 - график заданной функции авижения{на фиг. 3 - график коррекгировки движения исполнигель-; ного цвигателя. Устройство ОЛЯ оинамических испытаний содержит соединенные последовательно усилитель 1 (электрогиоравлический преобразователь), исполнительный двигатель 2 со штсжом 3 и полостями 4 и 5, дискретный датчик 6 положения; штока 3 и бПок 7 дифференцирования, вход которого связан с первым входом первого элемента 8 сравнения, а выход - с первым входом второго элемента 9 сравнения, второй вход которого соединен с одним выходом генератора 10 входных, сигналов, другой выход котфого подключен к второму входу элемента 8 сравнения, а также Щ1(} оаналоговый преобразоват ль 11, выход которого соединен с входом усилителя 1, а первый и второй входы « с вторым входом и выхо дом элемента 9 сравнения соответственно. Кроме того, устройство содержит датчик 12 направления, гидроцилиндр 13 с одностфонним штоком 14, золотник 15, имеющий однопоясковый плунжер 16 и гильзу 17 с тремя жнами 18-20 для подачи дополнительного количества рабочей жидкости к исполнительному двигат лю 2 от источника рабочей жидкости (не показан). Исполнительный двигатель 2 снабжен связанной с датчиком 6 положения и штоком 3 консолью 21. с закрепленной на ней стойкой 22, на которой шарнирно установлен двуплечий рычаг 23, гидроцилиндр 13 годключен к усилителю 1 параллельно исполнительному двигателю 2, а штоком 14 шарнирно связан плечом 24 рычага 23, втфое плечо 25 которого шарнирно связано с плун жером 16 золотника 15, при этом датчи 12 направления закреплен на консоли 21 и подключен к блоку 7 дифференцирования. Шток 5 исполнительного двигателя 2 связан с нагрузкой 26. Генератор Ю имеет внутренние регистры памяти (не показаны), связанные с программоносителем (не показаны), кото рый может представлять собой, например перфоленту с кодированными числами и т.п. Устройство для динамических испытаний работает следующим образом. По сигналу пуска генератор Ю с программоносителя считывает первое коди ованное шсло, состоящее из двух слов и записьюает эти слова в свои внутренние ро пистры памяти. Первому слову соответстует величина ДХ, изменения выходной оординаты исполнительного двигателя 2 гидроцилиндра 13 (на фиг. 2 и 3 N ). Второму слову соответствует величина скорости перемещения исполнительного двигателя 2 и гидрсцилиндра 13 до точки I на фиг. 3, т.е. отношению на участке аппрсжсимации О -N на фиг.2 и 3. Первое слово из регистра памяти генератора Ю с его второго выхода транслируется на второй вход элемента 8 сравнения. Второе слово с первого выхода генератора Ю транслируется на первый вход цифроаналогового, преобразователя 11 и на второй вход второго элемента 9 сравнения. Цифроаналоговый преобразователь 11 вырабатывает выходное аналоговое напряжение, цифровой код которого и управляющее воздействие (выходное напряжение) соответствуют зацанной скорости на прямолинейном участке заданной функции сшижения (точка N на фиг. 2 и 3) Это напряжение подается на вход усилителя 2, который -преобразует электрический сигнал в пропфциональный расход ра бочей жидкости. С соответствующего выхода, определяемого знаком напряжения, на входе усилителя I, рабочая жидкость подается в полости исполнительного двигателя 2 и гидроцилиндра 13. Последние приходят в движение с заданной скоростью. Как только исполнительный двигатель 2 приходит в движешге, датчик 6 положения начинает считьтать метки. Сипнал от первой считанной метки, соответствующей минимальному перемещению исполнительного двигателя 2 ( дХ на фиг. 3), поступает на первый вход блока 7 дифференцирования, в котфом отсчитывается реальное время перемещения двигателя 2,ЕСЛИ сигнал от очередной метки приходит раньше (точка 1 на фиг. 3), чем сравнится заданное время перемещения, транслируемое на второй вход элемента 9 сравнения, с генератора 10, с реальным временем, отсчитываемым в блоке 7 дифференцирования и подаваемым на первый вход элемента 9 сравнения (предположим, что реа,льному времени соответствует точка 1.и время фиг. 3), то в блоке 7 дифференцирования вычисляется к фректирующее время, равное At -At и в виде поправочного кода подается на втфой вход цифроаналогового преобразователя 11.Знак кфректирующей скорости определяется датчиком 12 направления. С выхода цагчика 12 этот сигнал в виде полярности напряжения поцается на второй вход блока 7 оифферендирования, определяя тем самым, добавить KcippeKтирующую скорость к заданной, или отнять. Скорость на уча стке 1-2 (на фиг. 3) определяется в ви це отношения ., где й)( - величина, соответствующая минимальной единице дискретности выходной координаты. Если сигнал от очередной метки приходит позже, чем сравнится текущее реальное время с заданным (точка l на фиг. 3), то досчитывается реальное дополнительное время цо тех пор, по ка не поступит этот сигнал от очередной метки. Корректирующее время в этом случае д i , а скорость опредепяется как ы -Atr Далее дополнительный двигатель .2 дви жется к следующей точке со cKoppeKtupoванной скоростью (на фиг. 3 показано пунктиром). В промежутках между метками датчика 6 положения выходная скорость исполнителыюго двигателя 2 может также изменяться из-за возникновения динамических составляющих со стороны нагрузки 26, например, при испытании подвески транспортного средства (автомобиля). В стремальных точках при подаче воздействия с помощью исполнительного двигателя 2 колесам испытуемого автомобиля по заранее записанному профилю дороги, возникают собственные колебания подвесЭти колебания влияют на заданную скорость, движения щтрка 3 исполнитель кого двигателя 2. Для поддержания задан ной скорости предусмотрены гедроцилиндр 13 и дополнительный золотник 15. До возникновения влияния динамических составляющих со стфоны нагрузки 26 на исполнительный двигатель 2 последний движется синхрсино гидроцилиндру 13. Если исполнительный двигатель 2 начинает замедлять свое движение,ги)фоциflU.V trirL4 -.- линдр 13 опережает его. Рычаг 23, опирающийся на стойку 22, закрепленную жестко на консоли 21, поворачивается, увлекая за собой плунжер 16 золотника 15, также жестко закрепленного гиль-. ЗОЙ 17 на консоли 21. Плунжер 16 золот1шка 15 начинает сдвигаться вниз. приоткрывая окно 18. Рабочая жидкость в виде дополнительного потока нач1шает поступать в полость 5 исполнительного цвигателя 2. Скорость его увеличивается, Если ис полни те лыдый авигатсль 2 двигается бьютрее чем гидрсшилиндр 13, то плунжер 16 золотника 15 начинает подниматься вверх и рабочая жидкость поступает в полость 4 двигателя 2, тормозя его движение и т.д. до тех пор, пока оба двигателя двигаются с синхронной скоростью. В точке N заданной функции движения (фиг. 2 и 3) происходит сравнение заданной величины перемещения генератором 1О в элементе 8 сравнения с реальным перемещением, отсчитанным датчиком 6 положения. Генератор .10 по команде с выхода элемента 8 сравнения считывает новое число с программоносителя, а двигатель 2 и гидроцилиндр 13 передвигаются в новое положение с ору- гой скоростью, соответствующей точкам К, L , М (фиг. 2) и т.д. В точках перегиба L и М (фиг. 2) знак направления движения меняется на противополода1ый. I. Таким образом, исполнительный двигатель 2 точно повторяет заданную по программе функцию движения, Использование электрогидравлической следящей системы в испытательной лабораторной и заводской технике, например в программных нагружателях и вибраторах, снизит затраты на проведение испытаний .за счет повыщения точности и уменьшения количества измерительных приборов для проведения этих испытаний. изобретения Ф. о р м у л а Устройство для дагаамических испытаний по авт. св. N 736О55, от л и чающееся тем, что с целью повышения точности, оно снабжено датчиком направления, гипроцилиндром с односто- ронним штоком, ЗОПОТ.НИКОМ, имеющим однопоясковый пдунжер и гильзу с тремя окнами для подачи дополнительного количества рабочей жидкости к исполнительному авигателю, а послерний снабжен связанной с датчиком положения консолью с шарнирно установленным на нем двуплечим рычагом, причем гидргащлиндр подключен усилителю параллельно исполнительному двигателю, а штоком шарнирно связан с одним из плеч двуплечего рычага, второе
плечо которого щарвирно связано с плунжером эолотняка, при этом аатчнк нап раьления закреплен на консоли и пощслючвп к блоку шфференшровання
Источники йнфо| мантга, принятые во вннмание при экспертизе 1. Авторское свипетельство СССР Л 736O5S, кл. Gi 05 В 23/02, 1977.
Фие.1 / /7W zL/
