(54) ГРУЗОПОДЪЕМНЫЙ КРАН НА КрЛЕСНрМ ХОДУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный кран на колесном ходу | 1973 |
|
SU540807A1 |
| УСТРОЙСТВО БЛОКИРОВКИ ТЕЛЕСКОПИЧЕСКОЙ ОПОРЫ СТРОИТЕЛЬНОЙ МАШИНЫ И СПОСОБ ЗАЩИТЫ ОТ УГОНА СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2535355C1 |
| МОСТОУКЛАДЧИК | 1996 |
|
RU2102554C1 |
| МОСТОВАЯ КОНСТРУКЦИЯ И МОСТОСБОРОЧНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ, СБОРКИ И УКЛАДКИ НА ПРЕГРАДУ МОСТОВОЙ КОНСТРУКЦИИ | 2001 |
|
RU2210656C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КОНСОЛЬНЫЙ ПОВОРОТНЫЙ КРАН, УСТАНОВЛЕННЫЙ НА БОРТОВУЮ ПЛАТФОРМУ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2429982C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| ПЛАТФОРМА С КРАНОМ-МАНИПУЛЯТОРОМ | 2007 |
|
RU2352479C1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |
| ГРУЗОВАЯ КОЛЕСНАЯ МАШИНА | 2007 |
|
RU2347692C1 |

I
Изобретение относится к подъемнотранспортным машинам, в частности к грузоподъемным кранам на колесном ходу, снабженным аутригерами.
Известен грузоподъемный кран на колесном ходу, содержащий раму ходовой части и аутригеры, состоящие из корпуса с выдвижными балками, снабженными приводами их выдвижения и опорами fI .
Однако известный кран характеризуется недостаточной маневренностью в стеоненных условиях.
Цель изобретения - повышение маневренности крана в стесненных условиях.
Для этого на верхней части корпуса жестко закреплена шайба, а снизу рамы ходовой части - втулка, по обеим сторонам от которой симметрично закреплены на корпусе опорные секторы с проушинами, спабй енными упорами, а между послед-ними и опорными секторами на раме ходовой части смонтирован опорный лист.
С целью фиксации корпуса выдвижных балок относительно рамы ходовой части
KOptQfC втзШолней с ьтверстйем, а на опорн:ойг пистб смонтирован стакан, в котором ра ШйЪЖёй йбдфужйнёшый палец, взайМбдействующий с отверстием корпуса.
С целью использования привода вьадви- , женйя балок доя поворота корттуса выдвижньгхГ балок на конце выдвижной балки и на раме ходовой части смонтированы пальцы со шплинтами, снабжённые тросом, а на корпусе закреппен ролик, огибаемый тро10сом. ; 1Та$иг. i изображена хбдова я чйстЁ т ру13Оподъек№с Гб КраТйа,вид сзади на аутригер; на фиг. 2 - то же, вид сбоку на фиг. 3 - то же, вид в плане; на фиг.4 15разрез А-А на фиг. 2; на фиг. 5 - корпус с выдвижными балками, смонтирован н1ый на ходовой части крана в аксонометрии; на фиг. 6 - ролики и пальцы, оги2fj баемые тросом, в разрезе; на фиг. 7 и
.схема от корпУса Выдвижением балок.
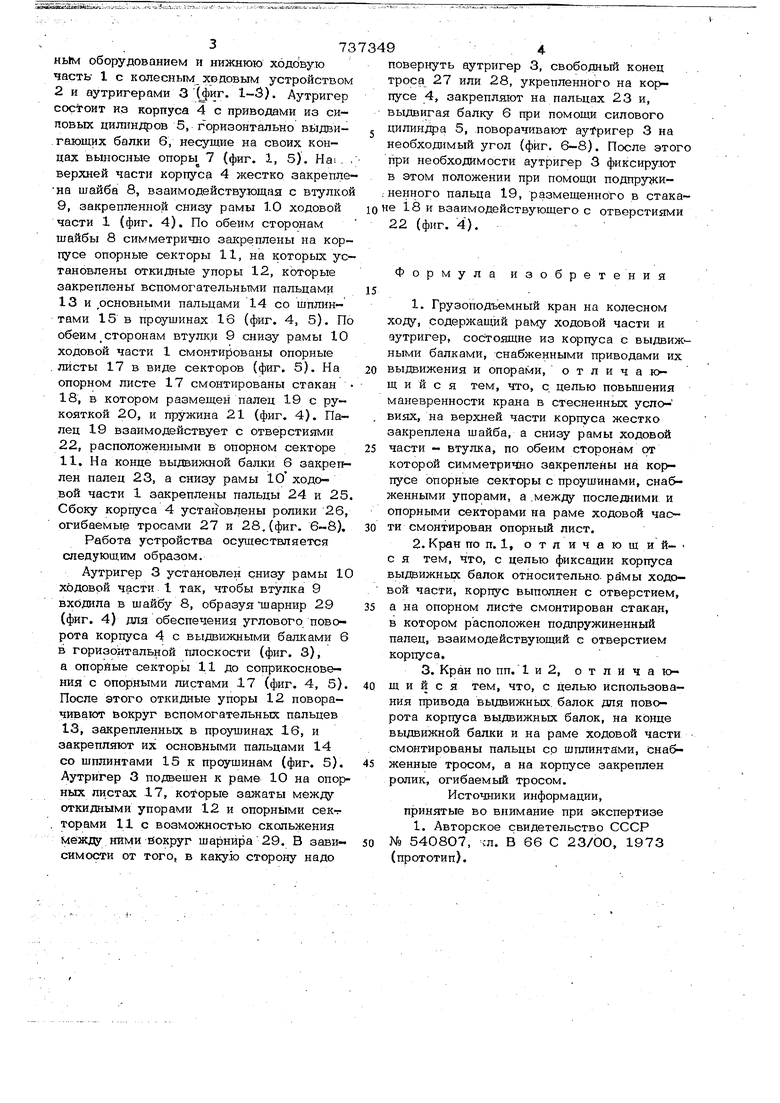
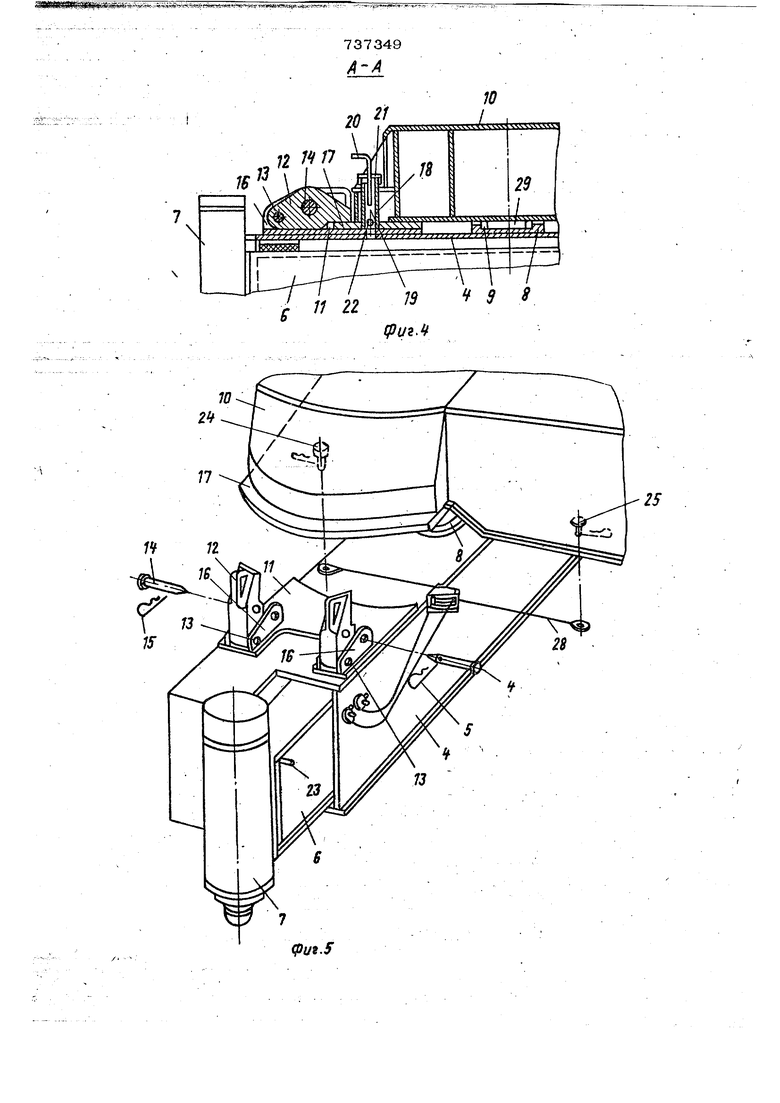
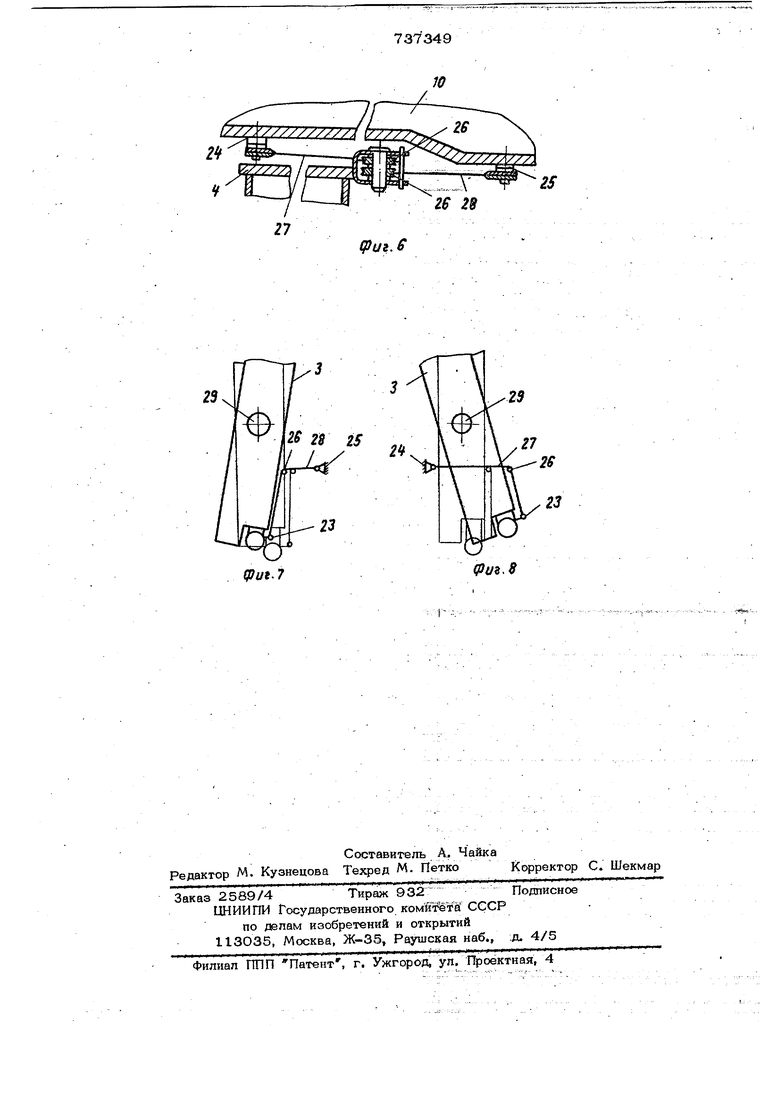
Ц«Й Грузоподъемный кран содержит верхнюю поворотную часть с рабочим грузоподъемHbfM оборудованием и нижнюю ходовую часть- 1 с колесным ходовым устройством 2 и аутригерами 3(Jmr. 1-3). Аутригер состоит из корпуса 4 с приводами из сиповых цилиндров 5, горизонтально выдвигающих балки 6, несущие на своих концах вьшоснью опоры 7 (фиг. 1, 5). Hai . , верхней части корпуса 4 жестко закреплена шайба 8, взаимодействующая с втулкой 9, закрепленной снизу рамы 10 ходовой части 1 (фиг. 4). По обеим сторонам шайбы 8 симметрично закреплены на корпусе опорные секторы 11, на которых ус тановлены откидные упоры 12, которые закреплены вспомогательными пальцами 13 и основными пальцами 14 со шплинтами 15 в проушинах 16 (фиг. 4, 5). По обеим сторонам втулки 9 снизу рамы 10 ходовой части 1 смонтированы опорные .листы 17 в виде секторов (фиг. 5). На опорном листе 17 смонтированы стакан 18, в котором размещен палец 19 с рукояткой 2О, и пружина 21 (фиг. 4). Палец 19 взаимодействует с отверстияпии 22, расположенными в опорном секторе 11. На конце выдвижной балки 6 закреплен палец 23, а снизу рамы 10 ходовой части 1 закреплены пальцы 24 и 25. Сбоку корпуса 4 установлены ролики 26, огибаемые тросами 27 и 28, (фиг. ),
Работа устройства осуществляется следующим образом.
Аутригер 3 установлен снизу рамы 10 ходовой части 1 так, чтобы втулка 9 входила в шайбу 8, обр азу яшарнир 29 (фиг. 4) для обеспечения углового поворота корпуса 4 с выдвижными балками 6 в горизонтальной плоскости (фиг. 3), а опорйые секторы 11 до соприкосновения с опорными листами 17 (фиг. 4, 5). После этого откидные упоры 12 поворачивают Вокруг вспомогательных пальцев 13, закрепленных в проушинах 16, и закрепляют их основными пальцами 14 со шплинтами 15 к проушинам (фиг. 5). Аутригер 3 подвешен к раме 10 на опорных листах 17, которые зажаты между откидными упорами 12 и опорными сек-г , торами 11 с возможностью скольжения iviefKXor ними вокруг шарнира29. В зависимости от того, в какую сторону надо
повернуть аутригер 3, свободный конец троса 27 или 28, укрепленного на корпусе 4, закрепляют на пальцах 23 и, выдвигая балку 6 при помощи силового
цилин; а 5, поворачивают аутригер 3 на необходимый угол (фиг. ). После этого при необходимости аутригер 3 фиксируют в этом положении при помощи подпружи. ненного пальца 19, размещенного в стакане 18 и взаимодействующего с отверстиями 22 (фиг. 4).
Формула изобретения
выдвижения и опорами, о т л и ч а и и с я тем, что, с целью повышения маневренности крана в стесненных уелоВИ51Х, на верхней части корпуса жестко закреплена шайба, а снизу рамы ходовой
части - втулка, по обеим сторонам от которой симметрично закреплены на корпусе опорные секторы с проушинами, снабженными упорами, а .между последними и опорными секторами на раме ходовой час-
ти смонтирован опорный лист.
Источники информации, принятые во внимание при экспертизе
73734р
737349
А-А
pu9.y
i 28 2S
23
(put.
29
(puz.8
