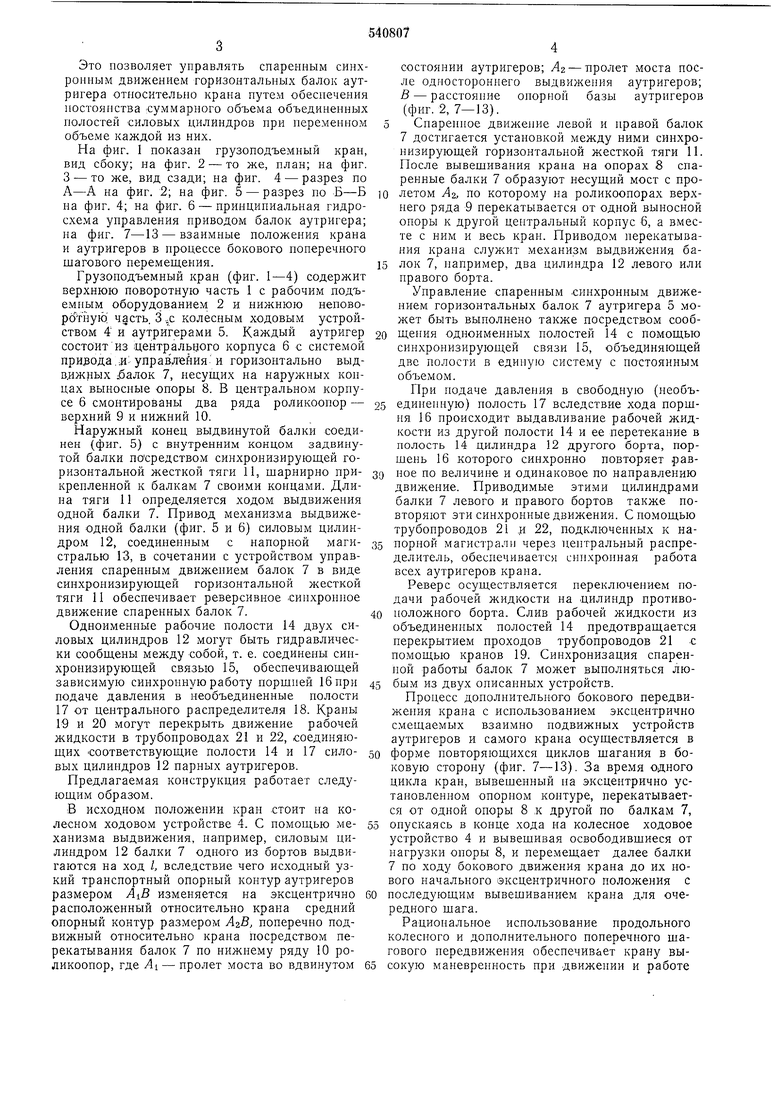
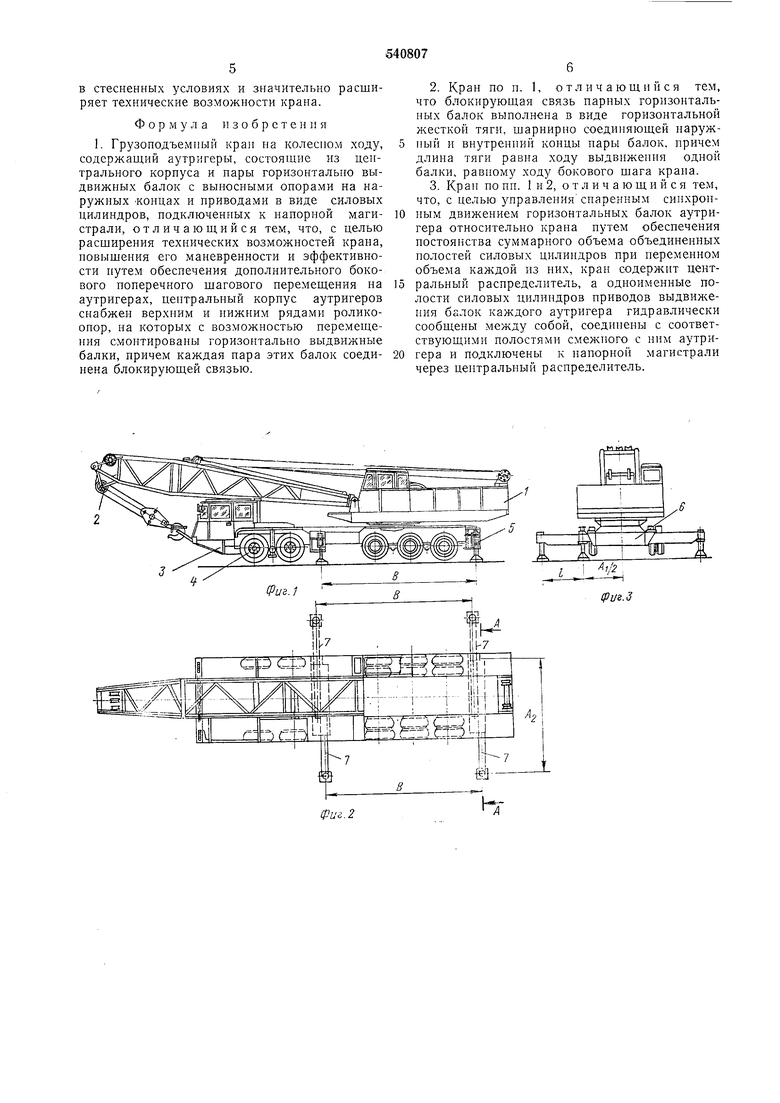
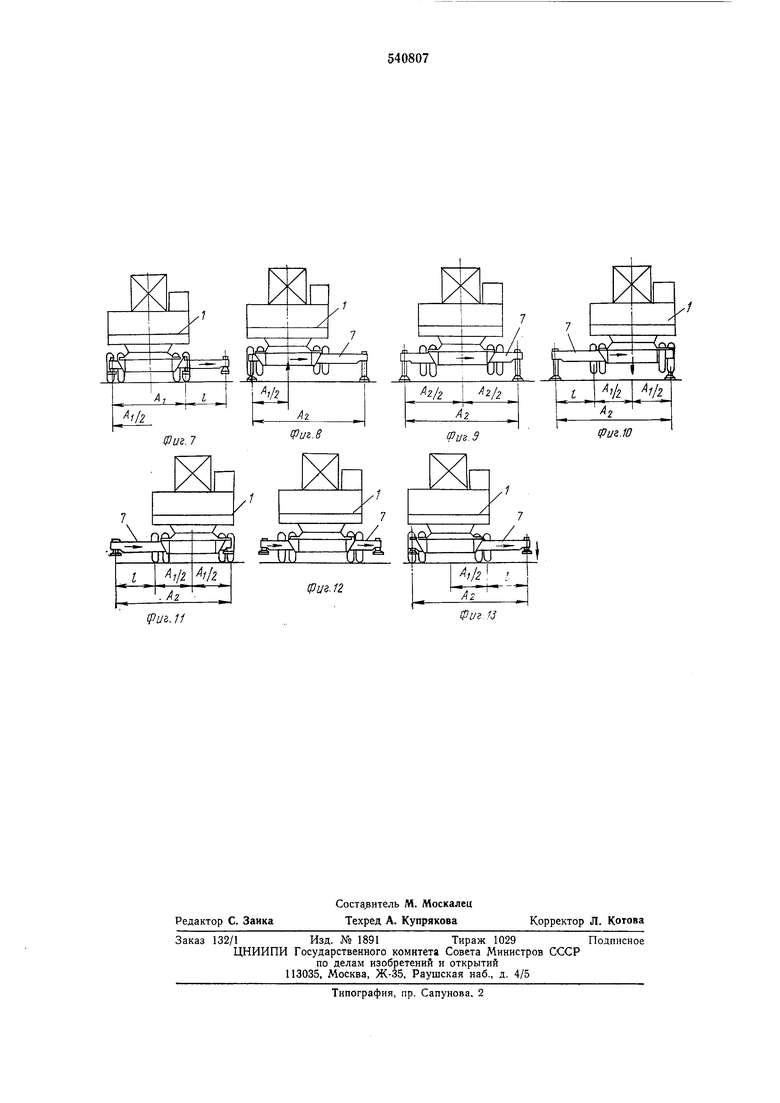
Это позволяет управлять спаренным синх ронным движением горизонтальных балок аут ригера относительно крана путем обеспечения постоянства суммарного объема объединенных полостей силовых цилиндров при неременном объеме каждой из них. На фиг. 1 показан грузоподъемный кран вид сбоку; на фиг. 2 - то же, план; на фиг 3 - то же, вид сзади; на фиг. 4 - разрез по А-А на фиг. 2; на фиг. 5 - разрез по Б-Б па фиг. 4; на фиг. 6 - принципиальная гидросхема управления приводом балок аутригера; на фиг. 7-13 - взаимные положения крана и аутригеров в процессе бокового поперечного шагового перемещения. Грузоподъемный кран (фиг. 1-4) содержит верхнюю поворотную часть 1 с рабочим подъемным оборудованием 2 и нижнюю неповорбтную часть. 3iC колесным ходовым устройством 4 и аутригерами 5. Каждый аутригер состоит из |централь1}ого корпуса 6 с системой .;И-управлбйия-и горизонтально выдВ.ИЖНЫХ балок 7, несущих на наружных концах выносные опоры 8. В центральном корпусе 6 смонтированы два ряда роликоопор - верхний 9 и нижний 10. Наружный конец выдвинутой балки соединен (фиг. 5) с внутренним концом задвинутой балки посредством синхронизирующей горизонтальной жесткой тяги 11, шарнирно прикрепленной к балкам 7 своими концами. Длина тяги 11 определяется ходом выдвижения одной балки 7. Привод механизма выдвижения одной балки (фиг. 5 и 6) силовым цилиндром 12, соединенным с напорной магистралью 13, в сочетании с устройством управления спаренным движением балок 7 в виде синхронизирующей горизонтальной жесткой тяги 11 обеспечивает реверсивное -синхронное движение спаренных балок 7. Одноименные рабочие полости 14 двух силовых цилиндров 12 могут быть гидравлически сообщены между собой, т. е. соединены синхронизирующей связью 15, обеспечивающей зависимую синхронную работу поршней 16 при подаче давления в необъединенные полости 17 от центрального распределителя 18. Краны 19 и 20 могут перекрыть движение рабочей жидкости в трубопроводах 21 и 22, соединяющих соответствующие полости 14 и 17 силовых цилиндров 12 парных аутригеров. Предлагаемая конструкция работает следующим образом. В исходном положении кран стоит на колесном ходовом устройстве 4. С помощью механизма выдвижения, например, силовым цилиндром 12 балки 7 одного из бортов выдвигаются на ход /, вследствие чего исходный узкий транспортный опорный контур аутригеров размером AiB изменяется на эксцентрично расположенный относительно крана средний опорный контур размером AzB, поперечно подвижный относительно крана посредством перекатывания балок 7 по нижнему ряду 10 роликоопор, где AI - пролет моста во вдвинутом состоянии аутригеров; AZ - пролет моста после одностороннего выдвижения аутригеров; В - расстояние опорной базы аутригеров (фиг. 2, 7-13). Спареппое движение левой и правой балок 7 достигается установкой между ними синхронизирующей горизонтальной жесткой тяги 11. После вывешивания крана на опорах 8 спаренные балки 7 образуют несущий мост с пролетом AZ, по которому на роликоопорах верхнего ряда 9 перекатывается от одной выносной опоры к другой центральный корпус 6, а вместе с ним и весь кран. Приводом перекатывания крана служит механизм выдвижения балок 7, например, два цилиндра 12 левого или правого борта. Управление спаренным синхронным движением горизонтальных балок 7 аутригера 5 может быть выполнено также посредством сообщения одноименных полостей 14 с помощью синхронизирующей связи 15, объединяющей две полости в единую систему с постоянным объемом. При подаче давления в свободную (необъединенную) полость 17 вследствие хода поршня 16 происходит выдавливание рабочей жидкости из другой полости 14 и ее перетекание в полость 14 цилиндра 12 другого борта, поршень 16 которого синхронно повторяет равное по величине и одинаковое по направлению движение. Приводимые эти.ми цилиндрами балки 7 левого и правого бортов также повторяют эти синхронные движения. С помощью трубопроводов 21 ,и 22, подключенных к напорной магистрали через центральный распределитель, обеспечивается синхронная работа всех аутригеров крана. Реверс осуществляется переключением подачи рабочей жидкости на цилиндр противоположного борта. Слив рабочей жидкости из объединенных полостей 14 предотвращается перекрытием проходов трубопроводов 21 с помощью кранов 19. Синхронизация спаренной работы балок 7 может выполняться любым из двух описанных устройств. Процесс донолнительного бокового передвижения крана с использованием эксцентрично смещаемых взаимно подвижных устройств аутригеров и самого крана осуществляется в форме повторяющихся циклов шагания в боковую сторону (фиг. 7-13). За время одного цикла кран, вывешенный на эксцентрично усановленном оБОрном контуре, перекатываетя от одной опоры 8 к другой по балкам 7, пускаясь в конце хода на колесное ходовое стройство 4 и вывешивая освободившиеся от агрузки опоры 8, и перемещает далее балки по ходу бокового движения крана до их ноого начального эксцентричного положения с оследующим вывешиванием крана для очеедного шага. Рациональное использование продольного олесного и дополнительного поперечного шаового передвижения обеспечивает крану выокую маневренность при движении и работе
в стесненных условиях и значительно расширяет технические возможности крана.
Формула изобретения
1. Грузоподъемный кран на колесном ходу, содержанл,ий аутригеры, состоящие из центрального кориуса и пары горизонтально выдвижных балок с выносными опорами на наружиых Концах и приводами в виде силовых цилиндров, подключенных к напорной магистрали, отличающийся тем, что, с целью расширения технических возможностей крана, повыщения его маневренности и эффективности путем обеспечения дополнительного бокового поперечного шагового перемещения на аутригерах, центральный корпус аутригеров снабжен верхним и нижним рядами роликоопор, на которых с возможностью перемещения смонтированы горизонтально выдвижные балки, причем каждая пара этих балок соединена блокирующей связью.
2.Кран по п. 1, отличающийся тем, что блокирующая связь парных горизонтальных балок выполнена в виде горизонтальной жесткой тяги, шариирно соединяющей наружный и внутренний концы пары балок, причем длина тяги равна ходу выдвижения одной балки, равному ходу бокового шага крана.
3.Кран но цн. 1 и 2, отличающийся тем, что, с целью травления спаренным синхронным движением горизонтальных балок аутригера относительно крана путем обеспечения иостоянства суммарного объема объединенных полостей силовых цилиндров при переменном объема каждой из них, кран содержит цептральный распределитель, а одноименные полости силовых цилиндров приводов ВЫДВИЛСения балок каждого аутригера гидравлически сообщены между собой, соединены с соответствующими полостями смежного с ним аутригера и подключены к напорной магистрали через центральный распределитель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ передвижения грузоподъемного крана | 1973 |
|
SU489712A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН НА КОЛЕСНОМ ХОДУ | 1990 |
|
RU2079428C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грузоподъемный кран на колесном ходу | 1977 |
|
SU737349A1 |
| ВЫНОСНАЯ ОПОРА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2361806C1 |
| АУТРИГЕР | 1973 |
|
SU390011A1 |
| ХОДОВАЯ ЧАСТЬ ГРУЗОПОДЪЕМНОГО КРАНА | 1969 |
|
SU237004A1 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
-.31
//
Риг. 6
