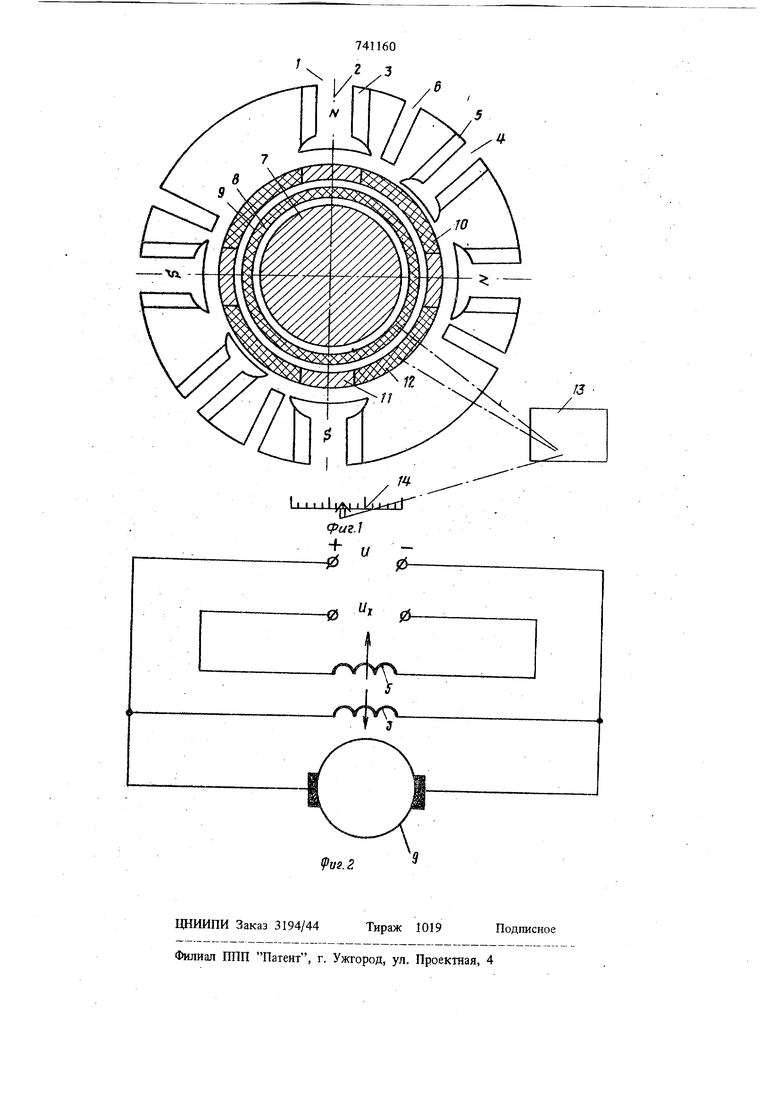
Изобретение относится к информационноизмерительной технике, а именно к устройствам измерения электрических сигналов постояшого тока компенсационным методом, и может быть использовано в автоматических системах измерения тока. Известно устройство, содержащее мапштотфовод, на полюсах которого размещены обмотки возбуждения, полюса выполнены с отверстиями ДГ1Я управляющих обмоток. В одной из частей каждого расщепленного полюса с управляющей с моткой установлен поворотный постоянный магнит, связанный через редуктор с валом рото ра, вал ротора через редуктор связан с блоком регистрации 1 . Конструкпля представляет собой реверсивный двухфазный асинхронный двигатель с короткозамкнутым ротором. Особенность заключается в том, что полюс управляемой фазы состоит из двух вставок, изготовленных из материала с вы сокой магнитной проницаемостью, в которых предусмотрены отверстия для управляющих обмоток постоянного тока. В двигателе сравниваются магнитные потоки, создаваемые управляющей обмоткой, через которую пропускается измеряемый постоянный ток, и эталонным постоянным магнитом. Если между магнитными потоками управляющей обмотки и постоятгого магнита нет заданного соответствия, то в рабочем зазоре двигателя возникает переменный магнтный поток, заставляющий вращаться ротор в сторону , обеспечивающую исключение рассогласовання. Недостатком устройства является сложность и нетехнологичность изготовления расщепленных полюсов, в которых должны бы1ъ помещены постоянные магниты на шарнире, а также сложность осуществления кинематической связи i, каждого магнита с валом двигателя. Наиболее близким к предлагаемому по технической сущности является устройство, содержащее компенсационный и исполнительный органы (к исполнительному органу относится электродвигатель переменного или постоянного тока с коллектором), выполне1шые в виде замкнутых магнитопроводов с обмотками возбуждения на полюсах (у компенсационного органа на боковых выполнены модулирующие обмотки, 374 вьшолняющие роль обмоток возбуждения), измерктельнук обмотку на Т-образнрм полюсе и плоскук подвижнзто обмотку на компенсационном органе, подвижную обмотку - якорь электродвигателя, а также усилитель, подаслюченньш к выходным обмотэсам компенсационного органа н электродвшятеяю, редуктор, через который .элект родвигатель управляет положением плоской подвнжной ббмотки и блока регистращш 2. По гтринципу действия устройство магнитомодуляционное. В боковых стержнях магнитопровода имеются отверстия, через которые намотаны модулирующие обмотки, занитывающиеся перемен ным током. .Они создают магнитные потоки, которые замыкаются только по торцовым участкем магнитопровода. При этом ЭДС в других ; обмотках не наводится. Результирующий поток замыкается через боковые стержни и индуктирует в выходной обмотке переменную ЭДС, которая усиливается фазочзшствительньгм ycaiirfтелем и подается на реверсивный двигатель, перемещающий плоскую подвижную обмотку до такого положения, при котором ЭДС на входе усилителя не станет равной нулю. Однако известное устройство достаточно сложЦель юобретешш - упрощение конструкции Это достигается тем, что автоматический компенсатор, содержащий магнитопровод с полюсами, обмотки возбуждения, расположенные на полюсах, подвижную обмотку, обмотку измеряемого напряжения, редуктор и блок регистращш, магнитопровод, вьшолнен с допол нительными полюса1УШ, размещенными друг про тив друга, и магнитными сердечниками, размещенными рядом с основными полюсами и через основной полюс, при этом коаксиально с якорем вьшолнен подвижный цилиндр с магнитными и немагнитными участками. На фиг. 1 представлена конструкция автоматического компенсатора; на фиг. 2 - прштципиальная электрическая схема автоматическог компенсирующего устройства. Компенсатор содержит магнитопровод 1, полюса 2 с обмотками постоянного тока 3. На магнитопроводе 1 имеются также два полюса 4 размещенные на магнитопроводе друг против друга с обмоткой 5, подключенной к измеряемому напряженшо, и ферромагнитные сердечники 6 рядом с полюсами 2 и через полюс. Коаксиально с неподвижным . ферромагнитным якорем 7 выполнен подвижный неметаллический якорь 8 с печатной (или вьшолненной каким-либо другим способом) обмоткой 9 на поверхности, а также подвижный цилиндр 10 с магнитными 11 и немагнитными 12 участками. Выходной вал устройства через редуктор 13 связан с блоком регистрации 14. 0 Работает j/стройство следующим образом. Когда измеряемое напряжение на полюсах равно кулю, яолюс 2 создают вращающий момент, который приводит в движению подвижную обмотку 8 (устройство в этот момент работает как обьрп-мя мапшш постоянного TOKS) , а она, в свою очередь, через редуктор 13 - подвижный цилиндр и блок регистрацш 14. Вращение будет происхоидть до тех пор, пока магнитные участки II цилиндра не займут положение между основными полюсами 2 к ферромагнитньтми сердечниками 6, в результате чего поток возбузедения замкнется через них по цешчке: полюс 2 - магнитный участок 11 подвижного цилиндра - ферромагнитный сердечник 6 - магнитопровод 1 корпуса устройства - полюс 2. Вращающий момент не будет создаваться и неметаллический якорь остановится (такая конструкция якоря выбрана с целью умеш. ннерцио1шости подвижной части, что увеличивает точность устройства и понижает порог чувствительности, хотя возможно применение н обычной конструкции электрической машины постоянного тока). Блок регистрации 14 сделает отметку, соответствующую нулевому измеряеяжению. Схематически это можно следующим образом: - СХ4ил С1.{) Х Лд--Ф „,,-.Мр,5Мро5 0 змеряемое нащ)яжение на обмотках полюсов 4; маг штный поток, пронизьгеающий ротор устройства; ПОСГОЯ1ШЫЙ магнитный поток, создаваемый полюсами 2; электромагнитный вращающий момент, приводящий в движение якорь; электромагнитный вращающий момент, который создают полюса 2; угловое положение оси неферромагнитного участка, подвижного цилиндра относительно положения, при котором весь поток от полюсов 2 явяется рабочим (см. фиг. 1); угловое положение оси магнитного участка 11 подвижного цилиндра , при котором весь поток от полюсов 2 замыкается через них на ферромагнитный сердечник 6, определяется по допустимым потокал рассеивания; координата пищущего механизма блока регистрации на диаграммной ленте; начало отсчета, соответствующее нулевому измеряемому напряжению.
При появлешга на зажимах обмотки 5 полюгав 4 измеряемого напряжения U ,, О (протем полюса 4 размещены на магнитопроводе таким образом и обмотки 5 включены по откоше1ию к обмоткам 3 полюсов 2 так, что создают противоположный вращающий момент) появляется
.магнитный поток, проходящий через подвижньп
,и неподвижный якоря, который создает вращающий момент, и подвижный ротор поворачивается и через редуктор меняет положение подвижного гщлиндра и блока регистращти (передаточное отнощение редуктора выбирается достаточно большим, чтобы устранить погрещность от инерционности якоря, по отношегшю к блоку, регистрации может быть выбрано другое передаточное отношение, соответствующее ширине диаграммн пенты). В результате изменяется положение магнитных участков 11 подвижного щшиндра и часть магнитного потока полюсов 2 будет проходить черезподвижный якорь и компенсирует магнитный поток от полюсов 4, пропорциональный измеряемому напряжению. Подвижный якорь остановится, пишущий механизм блока регистрации займет положение, соответствующее изме ряемому напряжегшю. Схематически зто мож1го показать так : (. Mj. .в пол-Фх- 1па5 0 ра5 - г где Ф, - магнитный поток, создаваемый полю сами 4, пропорциональный Mj(. - электромагнитный вращающий момент создаваемьи полюсами 4 пропорщ ,оналъный измеряемому шпряжеьшю; с - утповое положение оси магнитных участков подвижного цилиндра, пропорциональное измеряемому напряже нию; X - координата пишущего механизма бло ка регистрации на диаграммной ленте в определенном масшгабе, соответствующая измеряемому напряжению к проградуированная в единш1ах напряжения (тока).
Таким образом,.положение пишущего механизма однозначно определяется ве;гичияой измеряемого С51гнапа, подаваемого на обмотки полюсов 4 (вход устройства).
Благодаря новой совокупности существенных
Признаков досттнуто уменьшение колтпества злементов автомавяеского колтенсатора, что
упрощает конструкцию,
Форма магннтопровода обеспечивает экранироание от внешнюю полей и наводок. Отсутствие незакрепленных проводов и уменьшение числа злементов приводит к повышению надежности и ресурса. Существешю сшскены габариты устройства, а также вес и расход материалов. Нет необходимости в источнике переменного тока, что важно при автономном пита}ши аппаратурь$ от аккумуляторов и батарей, в частности в полевых условиях (в геологоразведке и нефтяной промышленности), устройство обладает повышенной искрой и взрьшобезопасностью по сравнению с реохордными приборами: Форм у.па изобретения Автоматический компенсатор, содержапввд магнитопровод с полюсами, обмотки возбуждения, расположешйю на полюсах, подвижную обмотку, обмотку измеряемого напряжения, редуктор и блок регистрации, отличающийся тем, что, с целью упрощения конструкции, магш топровод выполнен с дополнительными полюсами, paзмeщeнны и друг против друга, и магнитными cepдeчникa «, размещенными рядом с осиоБными полюсами и через основной полюс, ирн этом коаксиально с якорем вьгаол1-:ен подвижный цилиндр с магнитными и немагнитньп ш участкарли. Источники информащо, принятые во внимание при экспертизе 1.АЬторское свидетельство СССР № 239419, кл. G 01 R 17/00, 1965. 2.Зарипов М. Ф. Преобразователи с распределенными параметралот. М., Энергия, 1969, U. 125 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая машина постоянного тока | 1983 |
|
SU1138896A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| Автоматический компенсатор постоянного тока | 1985 |
|
SU1308961A1 |
| Способ измерения вращающего момента электрических машин | 1933 |
|
SU33608A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| СИНХРОННЫЙ МИКРОДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНЫМ УНИПОЛЯРНЫМ ВОЗБУЖДЕНИЕМ | 2012 |
|
RU2516286C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНОГО ЗАЗОРА В ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2004 |
|
RU2287167C2 |
| Автоматические весы с электромагнитным уравновешиванием | 1986 |
|
SU1388728A1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИКИ ВОЗДУШНЫХ ЗАЗОРОВ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2000 |
|
RU2192701C2 |