1
Изобретение относится к пожарной технике, а именно к устройствам пожарных автомобильных лестниц.
Известна пожарная автолестница, содержащая телескопически соединенные подвижные и неподвижные .звенья, установленные на подъемной раме и взаимодействующие с ее осью, устройство автоматического контроля и блокировки опасных линейных и угловых движений звеньев и исполнительный механизм 1.
Однако устройство имеет сложную ; собственную конструкцию и сложную кинематику привода, а все элементы конструкции устройства находятся при работе автолестницы в постоян ном движении, что приводит к преждевременному их износу и, следова тельно, к снижению надежности автолестницы.
Цель изобретения - упрощение конструкции и повышение надежности автолестницы в работе.
Указанная цель достигается тем, что устройство автоматического контроля и блокировки , опасных линейных И угловых движений звеньев имеет датчики преобразования линейных и угло.вых движений звеньев, снабженные, выключателями, и электронный блок, установленный на подъемной раме, причем датчик преобразования линейных движений звеньев закреплен на первом неподвижном звене и кинематически связан с подвижными звеньями, датчик преобразования угловых движений звеньев установлен на подъем10ной раме и кинематически связан с ее осью, а выключатели:датчиков включены в цепь электронного блока, который подключен к исполнительному механизму.
15
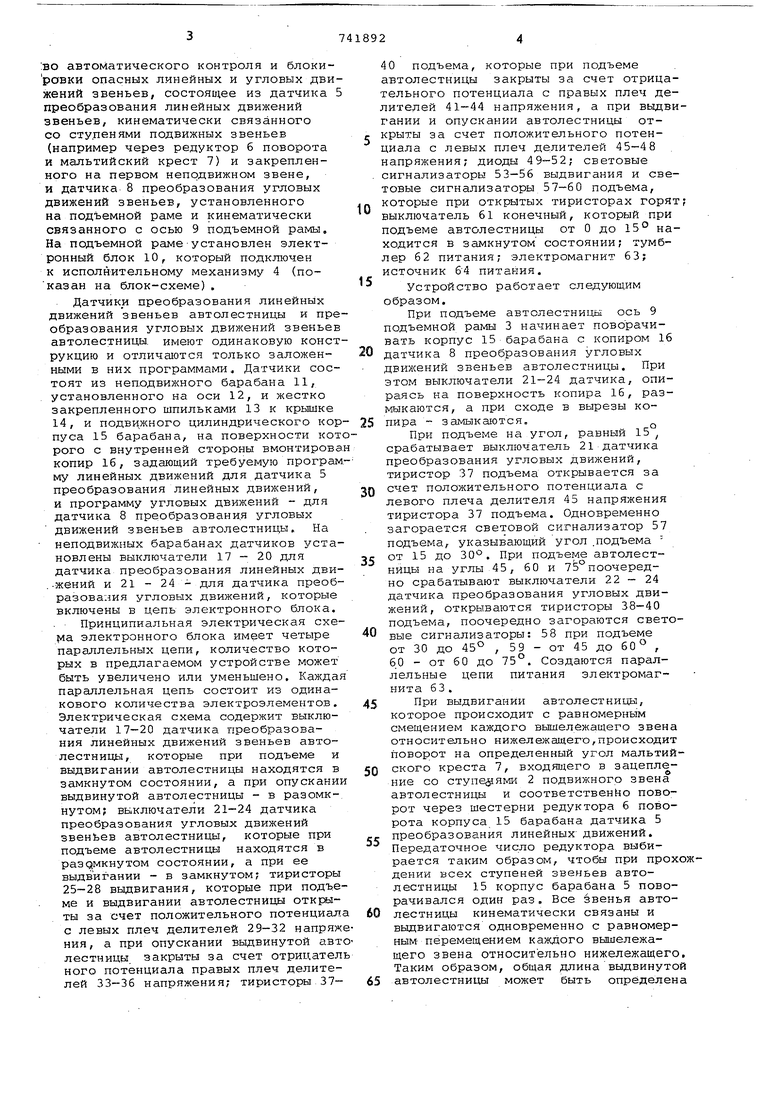
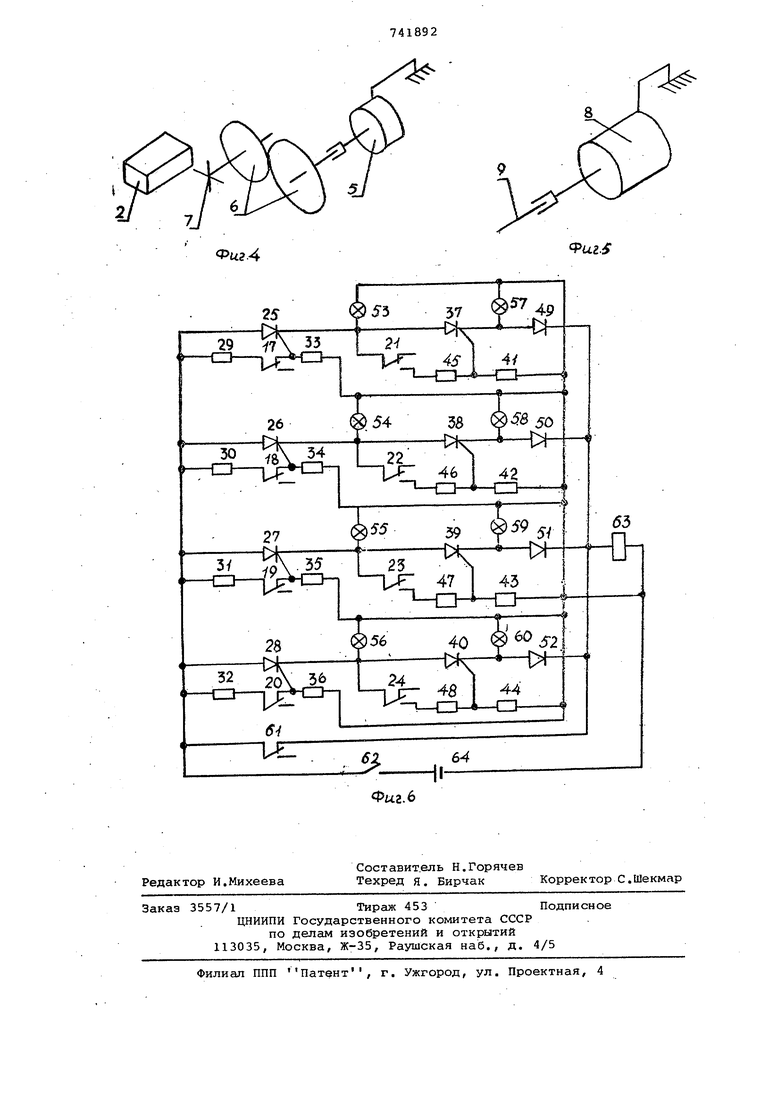
На фиг.1 показана установка устройства автоматического контроля и блокировки опасных линейных и угловых движений звеньев наавтолестнице; на фиг.2 - блок-схема устройства;
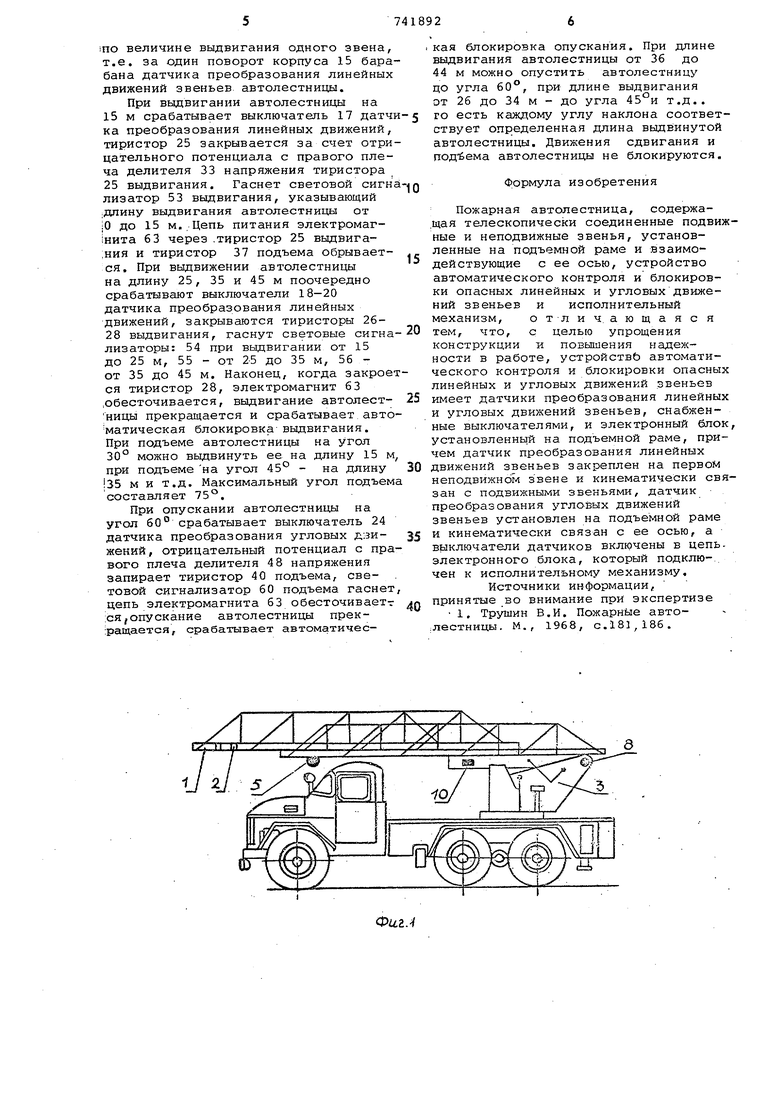
20 на фиг.З - устройство датчиков; на фиг.4и5 - кинематические схемы датчиков преобразования линейных и угловых движений звеньев; на фиг.6- принципиальная электрическая схема
25 устройства.
Пожарная автолестница содержит телескопически соединенные подвижные и неподвижные звенья I со ступенями 2, подъемную раму 3, исполнительный механизм 4 автолестницы и устройст30
О автоматического контроля и блокиовки опасных линейных и угловых двиений звеньев, состоящее из датчика 5 реобразования линейных движений веньев, кинематически связанного со ступенями подвижных звеньев (например через редуктор б поворота и мальтийский крест 7) и закрепленного на первом неподвижном звене, датчика 8 преобразования угловых вижений звеньев, установленного на подъемной раме и кинематически связанного с осью 9 подъемной рамы, На подъемной раме установлен электронный блок 10, который подключен к исполнительному механизму 4 (показан на блок-схеме) .
Датчики преобразования линейных движений звеньев автолестницы и преобразования угловых движений звеньев автолестницы, имеют одинаковую конструкцию и отличшотся только заложенными в них программами. Датчики состоят из неп.одви :ного барабана 11, установленного на оси 12, и жестко закрепленного шпилькс1ми 13 к крышке 14, и подви жного цилиндрического корпуса 15 барабана, на поверхности которого с внутренней стороны вмонтирован копир 16, задающий требуемую програм.му линейных движений для датчика 5 преобразования линейных движений, и программу угловых движений - для датчика 8 преобразования угловых движений звеньев автолестницы. На неподвижных барабанах датчиков установлены выключатели 17 - 20 для датчика преобразования линейных дви-жений и 21 - 24 - для датчика преобразова-.1ия угловых движений, которые включены в цепь электронного блока.
Принципиальная электрическая электронного блока имеет четыре параллельных цепи, количество которых в предлагаемом устройстве может быть увеличено или уменьшено. Каждая параллельная цепь состоит из одинакового количества электроэлементов. Электрическая схема содержит выключатели 17-20 датчика преобразования линейных движений звеньев автолестницы, которые при подъеме и выдвигании автолестницы находятся в замкнутом состоянии, а при опускании выдвинутой автолестницы - в разомк-, нутом; выключатели 21-24 датчика преобразования угловых движений звеньев автолестницы, которые при подъеме автолестницн находятся в разомкнутом состоянии, а при ее выдвигании - в замкнутом; тиристоры 25-28 выдвигания, которые при подъеме и выдвигании автолестницы ты за счет положительного потенциала с левых плеч делителей 29-32 напряжения, а при опускании выдвинутой автолестницы закрыты за счет отрицатель ного потенциала правых плеч делителей 33-36 напряжения; тиристоры.3740 подъема, которые при подъеме автолестницы закрыты за счет отрицательного потенциала с правых плеч делителей 41-44 напряжения, а при выдвгании и опускании автолестницы открыты за счет положительного потенциала с левых плеч делителей 45-48 напряжения; диоды 49-52; световые сигнализаторы 53-56 выдвигания и световые сигнализаторы 57-60 подъема, которые при открытых тиристорах горя выключатель 61 конечный, который при подъеме автолестницы от О до 15° находится в замкнутом состоянии; тумблер 62 питания; электромагнит 63; источник 64 питания.
Устройство работает следующим образом.
При подъеме автолестницы ось 9 подъемной рамы 3 начинает поворачивать корпус 15 барабана с копиром 16 датчика 8 преобразования угловых двихсений звеньев автолестницы. При этом выключатели 21-24 датчика, опираясь на поверхность копира 16, размыкаются, а при сходе в вырезы копира - замыкаются, При подъеме на угол, равный 15 , срабатывает выключатель 21 датчика преобразования угловых движений, тиристор 37 подъема открывается за счет положительного потенциала с левого плеча делителя 45 напряжения тиристора 37 подъема. Одновременно загорается световой сигнализатор 57 подъема, указывающий угол .подъема от 15 до ЗО-. При подъеме автолестницы на углы 45, 60 и 75°поочередно срабатывают выключатели 22-24 датчика преобразования угловых движений, открываются тиристоры 38-40 подъема, поочередно загораются световые сигнализаторы: 58 при подъеме от 30 до 45° , 59 - от 45 до 60° , 60 - от 60 до 75°. Создаются параллельные цепи питания электромагнита 63 .
При выдвигании автолестницы, которое происходит с равномерным смещением каждого вышележащего звена относительно нижележащего,происходит поворот на определенный угол мальтийского креста 7, входящего в зацепление со ступе(уями 2 подвижного звена автолестницы и соответственно поворот через шестерни редуктора 6 поворота корпуса 15 барабана датчика 5 преобразования линейных движений. Передаточное число редуктора выбирается таким образом, чтобы при прохдении всех ступеней звеньев автолестницы 15 корпус барабана 5 поворачивался один раз. Все звенья автолестницы кинематически связаны и выдвигаются одновременно с равномерным перемещением каждого вышележащего звена относительно нижележащего Таким образом, общая длина выдвинуто автолестницы может быть определен ino величине выдвигания одного звена т.е. за один поворот корпуса 15 бара бана датчика преобразования линейных движений звеньев автолестниды. При выдвигании автолестницы на 15 м срабатывает выключатель 17 датч ка преобразования линейных движений тиристор 25 закрывается за счет отри цательного потенциала с правого пле ча делителя 33 напряжения тиристора 25 выдвигания. Гаснет световой сигн лизатор 53 выдвигания, указывающий ;ДЛину выдвигания автолестницы от |0 до 15 м,,Цепь питания электромаг1нита 63 через .тиристор 25 выдвига:ния и тиристор 37 подъема обрывается. При выдвижении автолестницы на длину 25, 35 и 45 м поочередно срабатывают выключатели 18-20 датчика преобразования линейных движений, закрываются тиристоры 2628 выдвигания, гаснут световые сигна лизаторы: 54 при выдвигании от 15 до 25 м, 55 - от 2-5 до 35 м, 56 от 35 до 45 м. Наконец, когда закрое ся тиристор 28, электромагнит 63 .обесточивается, выдвигание автолестницы прекращается и срабатывает авто матическая блокировка выдвигания. При подъеме автолестницы на УГОЛ 30° можно выдвинуть ее на длину 15 м при подъеме на угол 45° - на длину 35 м и т.д. Максимальный угол подъем составляет 75°. При опускании автолестницы на угол 60° срабатывает выключатель 24 датчика преобразования угловых дзижений, отрицательный потенциал с пра вого плеча делителя 48 напряжения запирает тиристор 40 подъема, световой сигнализатор 60 подъема гаснет цепь электромагнита 63 обесточиваетт ;ся,опускание автолестницы прек;ра1дается, срабатывает автоматическая блокировка опускания. При длине выдвигания автолестницы от 36 до 44 м можно опустить автолестницу цо угла 60°, при длине выдвигания от 26 до 34 м - до угла 45°и т.д.. го есть каждому углу наклона соответствует определенная длина выдвинутой автолестницы. Движения сдвигания и подъема автолестницы не блокируются. Формула изобретения Пожарная автолестница, содержа,щая телескопически соединенные подвижные и неподвижные звенья, установленные на подъемной раме и взаимо действующие с ее осью, устройство автоматического контроля и блокировки опасных линейных и угловых движений звеньев и исполнительный механизм, отличающаяс я тем, что, с целью упрощения конструкции и повышения надежности в работе, устройство автоматического контроля и блокировки опасных линейных и угловых движений звеньев имеет датчики преобразования линейных и угловых движений звеньев, снабженные выключателями, и электронный блок, установленной на подъемной раме, причем датчик преобразования линейных движений звеньев закреплен на первом неподвижнбм звене и кинематически связан с подвижными звеньями, датчик преобразования угловых движений звеньев установлен на подъемной раме и кинематически связан с ее осью, а выключатели датчиков включены в цепьэлектронного блока, который подключен к исполнительному механизму. Источники информации, принятые во внимание при экспертизе 1, Трушин В.И. Пожарные авто.лестницы. М., 1968, с.181,186.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пожарная автолестница | 1977 |
|
SU684120A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
| ПОЖАРНАЯ АВТОЛЕСТНИЦА-•^?Ч^, | 1970 |
|
SU274662A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ НЕПОДВИЖНОГО СОСТОЯНИЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2051473C1 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА, РАМА ОПОРНОГО ОСНОВАНИЯ, УСТАНОВЛЕННЫЕ НА НЕЙ ЦИСТЕРНА, ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО, ПОЖАРНО-СПАСАТЕЛЬНАЯ ЛЕСТНИЦА И СИСТЕМА ЕЕ ВЫДВИГАНИЯ | 2005 |
|
RU2292928C1 |
| ЭЛЕКТРОУТЮГ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2043442C1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЯ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА НЕДОРОГАЯ ЛЕГКОВОЗВОДИМАЯ ТРАНСФОРМИРУЮЩАЯСЯ ИЗ ОДНО- В ДВУХЪЯРУСНУЮ ПАРКОВКУ, ВЫПОЛНЕННАЯ С ФУНКЦИЕЙ ЗАЩИТЫ ОТ УГОНА | 2006 |
|
RU2326219C1 |
| УСТРОЙСТВО ОХРАННО-ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 1992 |
|
RU2032220C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2226160C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
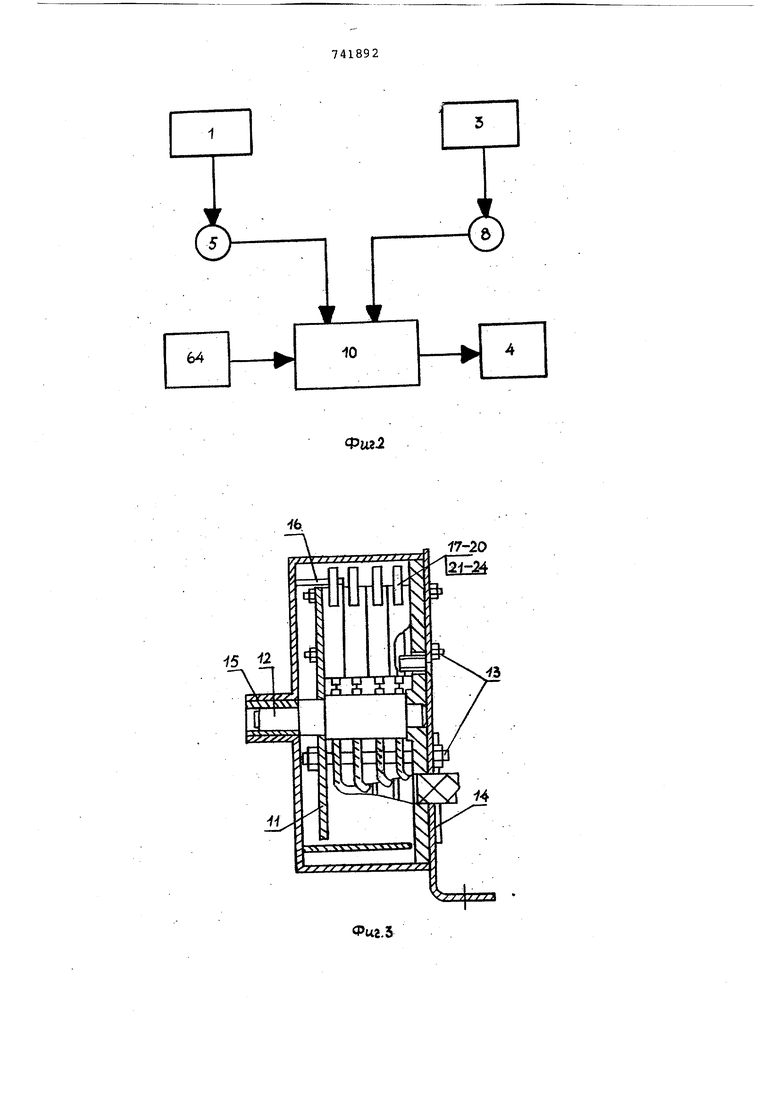
17-20 1ifc24
Фиг. 5
