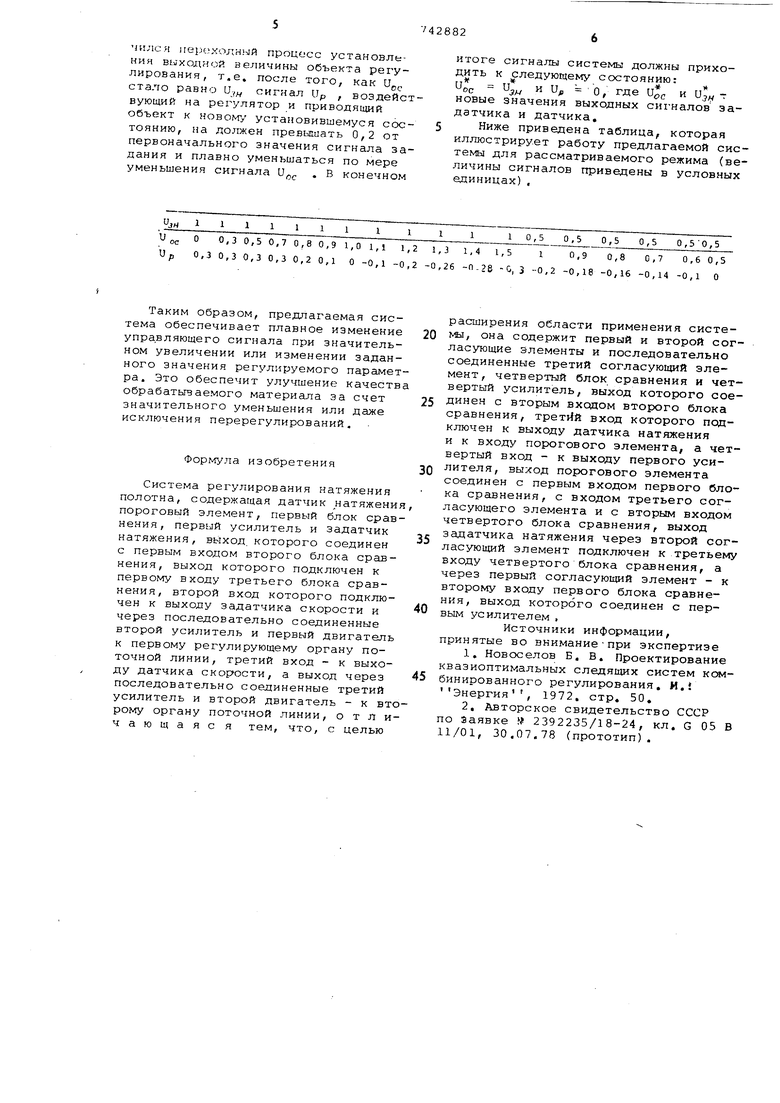
Изобретение относится к самонастраивающимся системам автоматического регулирования и может быть использовано для автоматического регулирования натяжения или вытяжки движущегося ленточного материала. Известно устройство формирования входного сигнала системы автоматичес кого регулирования,которое не обеспе чивает требуемых законов изменения входного сигнала системы с нелинейны объектом регулирования 1. Наиболее близким техническим решением к изобретению является система регулирования, содержащая датчик регулируемого параметра, пороговое устройство, первый блок сравнения, первый усилитель, задатчик регулируемого параметра, выход которого соединен с первым входом второго бло ка сравнения, выход которого соедине с первым входом третьего блока сравнения, второй вход которого соединен с выходом задатчика скорости и входом усилителя первого исполнительного двигателя, выход которого через первый исполнительный двигатель соединен с первым регулирующим органом поточной линии, третий вход третьего блока сравнения соединен с выходом датчика скорости, а выход через последовательно соединенные усилитель второго исполнительного двигателя и второй исполнительный двигатель подключен к второму регулирующему органу поточной линии 27, Описанная система обеспечивает размыкание обратной связи по регулируемому параметру при изменении заданного значения регулируемого параметра и замыкание обратной связи при подходе к заданному значению. Однако зт.а система обеспечивает размлкание обратной связи только при увеличении заданного значения, что ограничивает область использования системы. Целью изобретения является расширение области применения системы. Достигается это тем, что система содержит первый и второй согласующие элементы и йсследовательно соединенные третий согласующий элемент, четвертый блок сравнения и четвертый усилитель, выход которого соединен с вторым входом второго блока сравнения, третий вход которого подключен к выходу датчика натяжения и ко порогового элемента, а четвертый вхой - к выходу первого усилителя, выход порогового элемента соединен с nepSibiM входом первого блока сравнения, с входом третьего согласующего элемента и с вторым входом четверто го блока сравнения, выход задатчика натяжения через второй согласующий элемент подключен к третьему входу четвертого блока сравнения, а через первый согласующий элемент - к второ му входу первого блока сравнения, вы ХОД: которого соединен с первым усилителем, Ра чертеже представлена блок-схе ма системы. Она содержит задатчик нат|яжения 1, первый блок сравнения 2, :первый усилитель 3, второй усилител ь 4, третий усилитель 5, второй блрк сравнения 7, четвертый блок сра)Внения 8, четвертый усилитель 9, датчик натяжения 10, датчик скорости 11, задатчик скорости 12, пороговый элемент 13, первый, второй, ТР0ТИЙ согласующие элементы - соответственно 14,15,16, первый двигаTejlb 17, первый регулирующий орган 18, второй двигатель 19, второй регуЛирующий орган 20, Регулируемым параметром является нат яжение или вытяжка полотна 21, {Система работает следующим образом, Сформирование входного сигнала уси лителя 5 осуществляется в соответствии с величинами сигналов задатчика 1 регулируемого параметра, датчика 10 регулируемого параметра и задатчика 12 скорости. Формирование входного сигнала уси ли-реля 4 осуществляется в соответст вий с величиной сигнала задатчика 12 скорости. За счет получаемой раз ности скоростей регулирующих органов 18 и 20 поточной линии обеспечиваются требуемые величины натяжения.или вьтгяжки полотна 21. Усилители 9 и 3 служат дляусиления сигналов одной (рабочей) полярности. Если сигнал на входе усилителей 9 и 3 имеет обратную (нерабочук)) полярность, то сигнал на его выходе равен нулю. Пороговое устройство 13 служит ДЛИ фильтрации высокочастотной составляющей сигнала датчика 10, Участок движущегося материала 21, ограниченный регулирующими органами 18 и 20, с неприводными роликами (на чертеже не показаны), обеспечивающими требуемую траекторию движения ма териала 21, образуют нелинейный объект регулирования. При пуске исполнительных двигате лей 17 и 19 сигнал с датчика 10 регу лируемого параметра равен нулю или близок к нулевому значению. В этом случае сигнал с задатчика 1 полность поступает через блоки 6 и с раннеНИН на вход усилителя 5. При не;1ииеяном объекте регулирования поступление нескомпенсированного сигнала заданного значения на вход объекта приводит к значительным перерех улированиям, которые могут привести к получению некондиционного мотериала. Для исключения больших перерегулирований необходимо при близких к нулю величинах сигнала с датчика 10 регулируемого параметра частично компенсировать сигнал с задатчика 1, Заданная точность регулирования обеспечивается уменьшением компенсирующего сигнала до нуля при величине сигнала с датчика 10, близкой к величине сигнала с датчика 1, Коэффициент передачи согласующего элемента 14 выбирается равным тому отношению сигнала с датчика 10 к сигналу с задатчика 1, при котором компенсирующий сигнал должен быть равен нулю. Коэффициент передачи усилителя 3 выбирается таким, чтобы при нулевом сигнале с датчика на входе усилителя 5 формировался сигнал, величина которого не приводит к недопустимым перерегулированиям. Когда сигкал с датчика 10 превьпиает си1нал с выхода элемента 14, усилитель 3 запирается, и на входде усилителя Б формируется разность сигналов с эадатчика 1 и с датчика 10. При уменьшении заданного значения регулируемого параметра (с задатчика 1) отпирается усилитель 9, и на усилитель 5 поступает добавочный сигнал, чем обеспечивает плавное уменьшение регулируемого параметра. Для того, чтобы при значительных перерегулированиях усилитель 9 случайно не отпирался, вводится согласующий элемент 16, который увеличивает значения порога срабатывания усилителя 9 при увеличении сигнала, с датчика 10, Рассмотрим один из возможных режимов системы. Пусть необходимо, чтобы выходной сигнал Up блока 7 сравнения изменился в зависимости от выходных сигналов UjH задатчика 1 и DOC датчика 10 следубщим образом: при Uoc « О , 7 Ujj, , QO р , 3 Ujw , .щэи О , 7 UOP 1,3 и,„ , Up UjH - Uoc, при UtfC 1 : 3 Озн / , в случае большого nepepei-улирования выходного сигнала объекта, входной сигнал регулирования должен ограничиваться для полного перевода системы к состоянию UjH Uoc , следовательно. Up О, При резком уменьшении величины задатчика и,/ (после того, как закончи;1ся 11ерс.хо/тн.ый процесс установления выходной величины объекта регулирования, т.е. после того, как Uj,j, стало равно и, сигнал Up , воздействующий на регулятор и приводящий объект к новому установившемуся состоянию, на должен превымать 0,2 от первоначального значения сигнала задания и плавно уменьшаться по мере уменьшения сигнала U . В конечном
итоге сигналы системы должны приходить к следующему состоянию: ос ujw и и О, где и U т новые значения выходных си1-налов эадатчика и датчика.
Ниже приведена таблица, которая иллюстрирует работу предлагаемой системы для рассматриваемого режима (величины сигналов приведены в условных единицах).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования натяжения полотна | 1976 |
|
SU693333A1 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Система регулирования режима работы дробилки | 1983 |
|
SU1101303A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 1992 |
|
RU2036808C1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ СТАРТЕР-ГЕНЕРАТОРОМ | 2010 |
|
RU2453034C2 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Способ автоматического управления электрическим режимом шестиэлектродной руднотермической электропечи и система для его реализации | 1990 |
|
SU1765667A1 |
0,3 0,3 0,3 0,3 0,2 0,1 о Таким образом, предлагаемая система обеспечивает плавное изменение управляющего сигнала при значительном увеличении или изменении заданного значения регулируемого парамет ра. Это обеспечит улучшение качеств обрабатываемого материала за счет значительного уменьшения или даже исключения перерегулирований. Формула изобретения Система регулирования натяжения полотна, содержащая датчик натяжени пороговый элемент, первый блок срав нения, первый усилитель и задатчик натяжения, выход, которого соединен с первым входом второго блока срав нения, выход которого подключен к первому входу третьего блока сравнения, второй вход которого подклю чен к выходу задатчика скорости и через последовательно соединенные второй усилитель и первый двигател к первому регулирующему органу поточной линии, третий вход - к выхо ду датчика скорости, а выход через последовательно соединенные третий усилитель и второй двигатель - к в рому органу поточной линии, о т л чающаяс я тем, что, с целью -0,1 -0,2 -0,26 -П.28 -0,3 -0,2 -0,18 -0,16 -0,14 -0,1 расширения области применения систеNbi, она содержит первый и второй согласующие элементы и последовательно соединенные третий согласующий элемент, четвертый блок сравнения и четвертый усилитель, выход которого соединен с вторым входом второго блока сравнения, третий вход которого подключен к выходу датчика натяжения и к входу порогового элемента, а четвертый вход - к выходу первого усилителя, выход порогового элемента соединен с первым входом первого блока сравнения, с входом третьего согласующего элемента и с вторым входом четвертого блока сравнения, выход задатчика натяжения через второй согласующий элемент подключен к третьему входу четвертого блока сравнения, а через первый согласующий элемент - к второму входу первого блока сравнения, выход которого соединен с первым усилителем , Источники информации, принятые во внимание-при экспертизе 1.Новоселов Б. В. Проектирование квазиоптимальных следящих систем комбинированного регулирования. И. Энергия, 1972. стр. 50. 2.Авторское свидетельство СССР по заявке 2392235/18-24, кл. G 05 В 11/01, 30.07,78 (прототип).
