Изобретение относится к автоматическому управлению, в частности к автоматизации процессов управления перемещениям рабочих органов устройств с помощью винтовых механизмов. Преимущественная область их использования - высокоточные следящие системы, в которых реверсирование и периодические остановки исполнительных приводов нежелательны из-за снижения эксплуатационных характеристик, в устройствах для создания плавных перемещений со скоростями, близкими к нулю, в установках для механических испытаний материалов в экстремальных условиях реверсивных прокатных станах и т. п.
Известны способ управления винтовым механизмом и устройство для его осуществления. Способ заключается в том, что в связанном с концом винта рабочем органе (образце) с помощью датчика формируют контролируемый параметр (скорость удлинения), сравнивают заданное по программе значение с измеряемым и разность между этими значениями (величину рассогласования) используют для выдачи соответствующей команды исполнительному органу (двигателю). Устройство для осуществления способа содержит блок сравнения сигналов датчика с задаваемыми, программатор и исполнительный привод (двигатель) для отработки сигнала рассогласования, связанный с винтом. Гайка винтового механизма в этом устройстве закреплена жестко. Описанные технические решения не обеспечивают требуемой точности поддержания заданного закона изменения контролируемого параметра, особенно при изменяющихся внешних условиях, имеют низкие эксплуатационные характеристики. Так, например, когда рабочим органом является образец для испытания материалов, то при неустановившихся тепловой и упругой деформациях образца и связанных с ним элементов нарушается закон нагружения образца, поскольку изменяются во времени как длина части винта, находящаяся между гайкой и образцом, так и степень накопления упругой деформации в силовой цепи между гайкой и образцом. Вследствие изменения внешних условий в ту или иную сторону возникает необходимость в реверсировании двигателя для компенсации вредного влияния внешних условий. В то же время этот двигатель предназначен для реализации заданного закона изменения контролируемого параметра. Выполнение этих двух задач с помощью одного двигателя, вращающего винт в жестко закрепленной гайке, приводит к увеличению времени отработки сигнала рассогласования, к пульсирующей работе двигателя, к очень низкой точности поддержания заданного закона изменения контролируемого параметра и, соответственно, к ухудшению эксплуатационных характеристик.
Наиболее близкими к предлагаемым изобретениям по технической сущности и достигаемому результату являются способ управления винтовым механизмом и устройство для его осуществления, реализованные в известном техническом решении. Способ заключается в том, что в соединенном с винтом рабочем органе формируют контролируемый параметр (т. е. с рабочим органом соединяют датчик и устанавливают соответствие между контролируемой величиной сигнала датчика и параметром движения или состояния рабочего органа), сравнивают контролируемый параметр с заданным значением и в случае рассогласования производят осевое перемещение винта за счет его вращения и вращения гайки от отдельных двигателей. Устройство для осуществления способа содержит блоки сравнения сигналов датчиков с заданными, программатор и два исполнительных привода (двигателя), один из которых кинематически связан с винтом, а другой - с гайкой. При неустановившихся внешних условиях сигнал рассогласования отрабатывается за счет одновременного вращения винта и гайки, при этом вращением гайки могут быть компенсированы температурные и другие деформации, а вращением винта реализуется перемещение рабочего органа по заданному закону. Этот способ управления винтовым механизмом и устройство для его осуществления имеют низкие эксплуатационные характеристики при возвратно-поступательном движении рабочего органа, поскольку при этом возникают люфты в кинематической цепи между местом соединения винта с рабочим органом и двигателями. Люфты приводят к снижению степени чувствительности, динамической точности и быстродействия, неблагоприятно влияют на динамику автоматического управления. По истечении времени переходного процесса рабочий орган будет перемещаться с заданной скоростью. Однако при необходимости изменить направление движения рабочего органа на противоположное возникает потребность в реверсировании двигателей. При этом в кинематической цепи, имеющей, как правило, редуктор и разъемные соединения, вновь появляются люфты и т. д. Люфт между винтом и гайкой винтового механизма устраняется, если использовать безлюфтовую шариковинтовую передачу. Появление же основного люфта в силовых редукторах кинематических цепей при ре версировании двигателей устранить невозможно. Не составляет исключения и волновой редуктор, у которого под нагрузкой гибкое колесо изменяет свою форму и при реверсе происходит изменение формы гибкого колеса в противоположную сторону, прежде чем вал, связанный с гибким колесом, начнет передавать крутящий момент, - это эквивалентно повороту вала обычного редуктора с зубчатыми колесами при выборке люфта.
Низкие эксплуатационные характеристики имеют место и в случае периодических остановок двигателей винта или гайки, когда для осуществления возвратно-поступательного движения рабочего органа управляющий сигнал поочередно подается на двигатель винта при остановленном двигателе гайки и на двигатель гайки при остановленном двигателе винта. Это объясняется тем, что в реальных системах автоматического управления нельзя получить плавную отработку скоростей, сколь угодно мало отличающихся от нуля, так как при очень малых скоростях начинают сказываться флуктуации нагрузочного момента, которые заметно влияют на плавность движения исполнительной оси. Динамические механические характеристики двигателей становятся неопределенными, причем род двигателей (электрические, гидравлические и т. п. ) не имеет значения ввиду принципиальной невозможности получить плавное движение исполнительной оси автоматической системы управления со сколь угодно малой скоростью из-за скачкообразности перехода от трения покоя к трению движения, т. е. критерий плавности работы механизма при указанном режиме не соблюдается.
Цель изобретения - улучшение эксплуатационных характеристик при возвратно-поступательном движении рабочего органа.
Цель достигается благодаря тому, что в известном способе управления винтовым механизмом, при котором в соединенном с винтом рабочем органе формируют контролируемый параметр, сравнивают его с заданным значением и в случае рассогласования производят осевое перемещение винта за счет его вращения и вращения гайки от отдельных двигателей, предварительно приводят в синхронное вращение винт и гайку в одном направлении с одинаковой угловой скоростью ωo, величину которой устанавливают соответствующей половине номинальной угловой скорости вращения двигателей, а опорный сигнал, соответствующий ωo, задают по абсолютной величине превышающим в 1,5-10 раз абсолютное максимальное значение сигнала управления в диапазоне регулирования, и в дальнейшем отрабатывают рассогласование между заданным и контролируемым значениями параметра, вращая винт и гайку с разными угловыми скоростями, причем задают пороговую величину сигнала управления и при величине рассогласования между заданным и контролируемым значениями параметров, которой соответствует управляющий сигнал, меньший пороговой величины, отрабатывают рассогласование изменением угловой скорости вращения одного двигателя, а при величине рассогласования, соответствующей управляющему сигналу, превышающему пороговую величину, отрабатывают рассогласование изменением угловой скорости вращения двух двигателей одновременно.
Цель достигается также благодаря тому, что в устройство для управления винтовым механизмом, содержащее первый и второй сумматоры, выходы которых связаны соответственно с регуляторами частоты вращения двигателя винта и двигателя гайки, датчик контролируемого параметра, программатор, блок сравнения, первый вход которого связан с датчиком контролируемого параметра, а второй вход - с выходом программатора, ПИД-регулятор, вход которого связан с выходом блока сравнения, введены задатчик начальной частоты вращения двигателей винта и гайки, дифференцирующее звено, первый и второй блоки пороговых значений, первый, второй и третий элементы ИЛИ, первый, второй, третий, четвертый, пятый и шестой нормирующие преобразователи, перемножитель, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, первый и второй инверторы, первый и второй детекторы знака, первый, второй, третий, четвертый, пятый и шестой ключи, причем выход ПИД-регулятора соединен с входом первого блока пороговых значений, первый выход которого соединен с входом первого ключа, входом третьего ключа и входом первого инвертора, вход дифференцирующего звена соединен с датчиком контролируемого параметра, а выход - с входом второго блока пороговых значений, первый выход которого соединен с входом второго ключа, выход первого инвертора подключен к входу четвертого ключа, второй выход первого блока пороговых значений соединен с входом первого нормирующего преобразователя, входом второго инвертора и входом пятого ключа, выход первого нормирующего преобразователя соединен с первым входом первого элемента ИЛИ, выход второго инвертора подключен к входу шестого ключа, второй выход второго блока пороговых значений соединен с входом второго нормирующего преобразователя, выход которого соединен с вторым входом первого элемента ИЛИ, первым входом второго элемента ИЛИ и первым входом третьего элемента ИЛИ, выход первого элемента ИЛИ соединен с управляющими входами первого, второго, пятого и шестого ключей, выходы первого и второго ключей соединены с входами перемножителя, входами третьего и четвертого нормирующих преобразователей, выходы третьего и четвертого нормирующих преобразователей соединены с входами элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход перемножителя подключен к входам первого и второго детекторов знака, выход первого из которых соединен с входом пятого нормирующего преобразователя, выход которого соединен с вторым входом второго элемента ИЛИ, выход второго детектора знака соединен с входом шестого нормирующего преобразователя, выход которого соединен с вторым входом третьего элемента ИЛИ, выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ соединен с третьим входом второго элемента ИЛИ, выход второго и третьего элементов ИЛИ соединены соответственно с управляющими входами третьего и четвертого ключей, выходы третьего и пятого ключей соединены соответственно с первым и вторым входами алгебраического суммирования первого сумматора, выходы четвертого и шестого ключей соединены соответственно с первым и вторым входами алгебраического суммирования второго сумматора, а выходы задатчика начальной частоты вращения соединены с опорными входами первого и второго сумматоров.
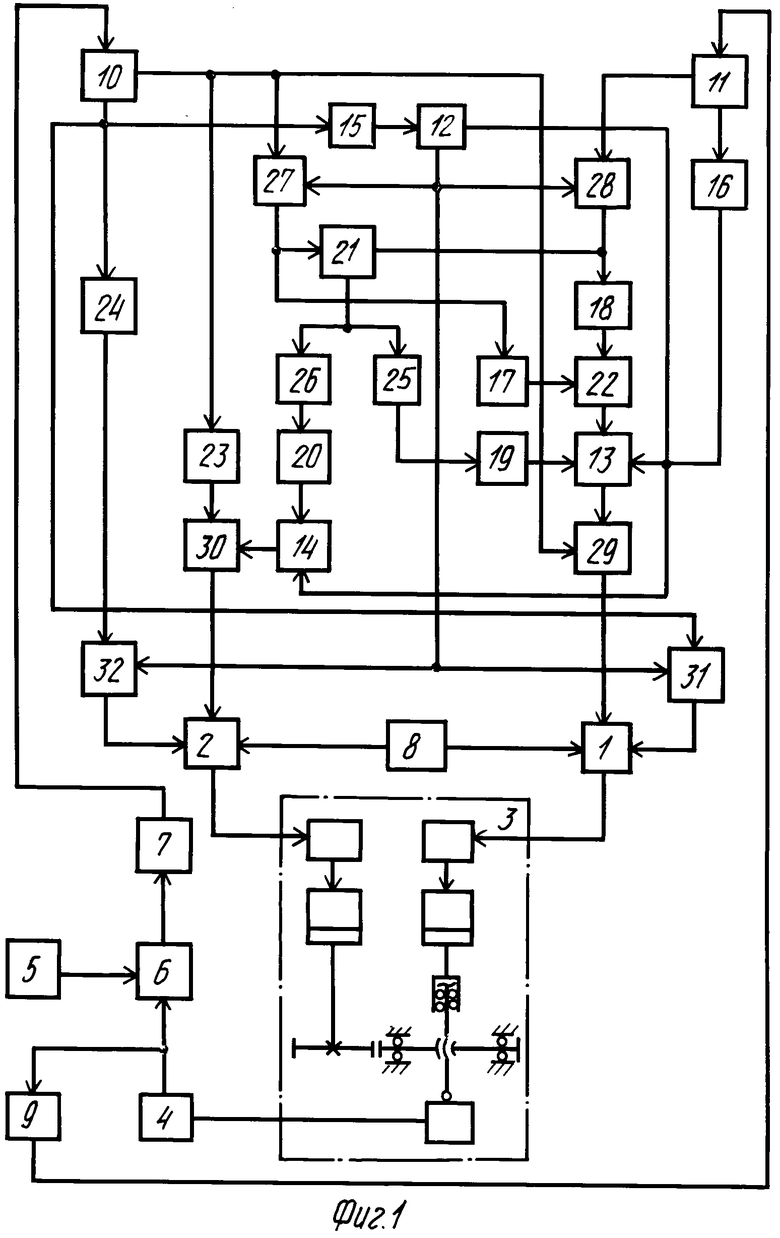
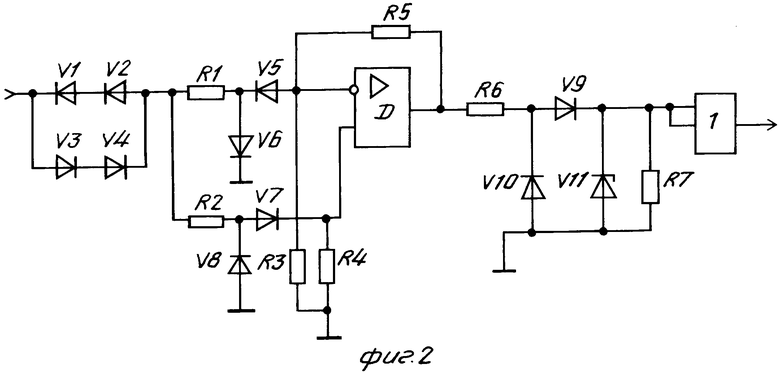
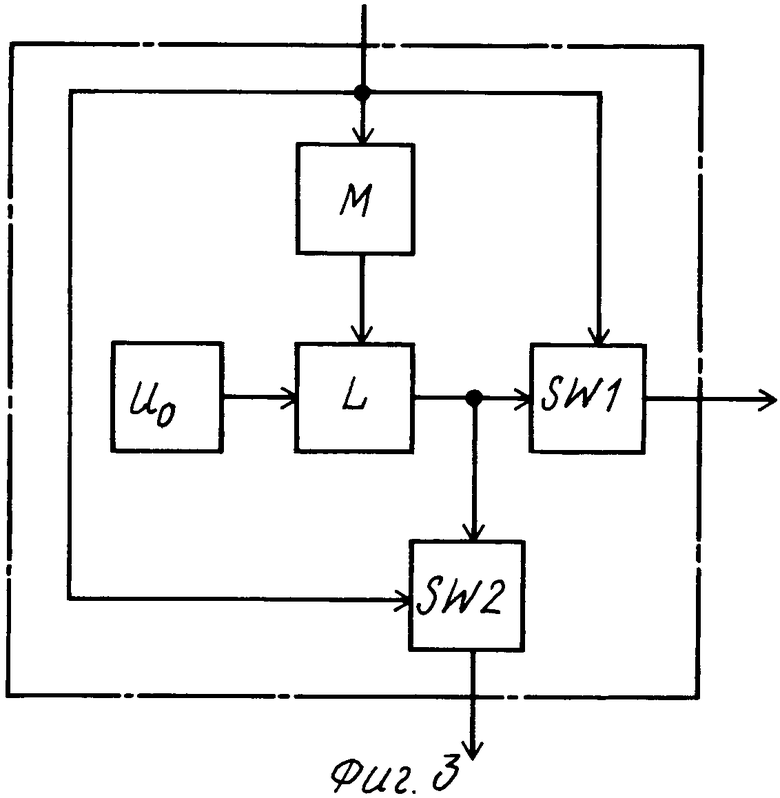
На фиг. 1 приведена структурная схема устройства управления винтовым механизмом; на фиг. 2 - принципиальная схема нормирующего преобразователя; на фиг. 3 - структурная схема блока пороговых значений.
Устройство содержит первый 1 и второй 2 сумматоры, выходы которых связаны соответственно с регуляторами частоты вращения двигателя винта и двигателя гайки винтового механизма 3, датчик 4 контролируемого параметра, программатор 5, блок 6 сравнения, первый вход которого связан с датчиком 4 контролируемого параметра, а второй вход - с выходом программатора 5, ПИД-регулятор 7, вход которого связан с выходом блока 6 сравнения, задатчик 8 начальной частоты вращения двигателей винта и гайки, дифференцирующее звено 9, первый 10 и второй 11 блоки пороговых значений, первый 12, второй 13 и третий 14 элементы ИЛИ, первый 15, второй 16, третий 17, четвертый 18, пятый 19 и шестой 20 нормирующие преобразователи, перемножитель 21, элемент 22 ИСКЛЮЧАЮЩЕЕ ИЛИ, первый 23 и второй 24 инверторы, первый 25 и второй 26 детекторы знака, первый 27, второй 28, третий 29, четвертый 30, пятый 31 и шестой 32 ключи, выход ПИД-регулятора 7 соединен с входом первого блока 10 пороговых значений, первый выход которого соединен с входом первого ключа 27, входом третьего ключа 29 и входом первого инвертора 23, вход дифференцирующего звена 9 соединен с датчиком 4 контролируемого параметра, а выход - с входом второго блока 11 пороговых значений, первый выход которого соединен с входом второго ключа 28, выход первого инвертора 23 подключен к входу четвертого ключа 30, второй выход первого блока 10 пороговых значений соединен с входом первого нормирующего преобразователя 15, входом второго инвертора 24 и входом пятого ключа 31, выход первого нормирующего преобразователя 15 соединен с первым входом первого элемента ИЛИ 12, выход второго инвертора 24 подключен к входу шестого ключа 32, второй выход второго блока 11 пороговых значений соединен с входом второго нормирующего преобразователя 16, выход которого соединен с вторым входом первого элемента ИЛИ 12, первым входом второго элемента ИЛИ 13 и первым входом третьего элемента ИЛИ 14, выход первого элемента ИЛИ 12 соединен с управляющими входами первого 27, второго 28, пятого 31 и шестого 32 ключей, выходы первого 27 и второго 28 ключей соединены с входами перемножителя 21, входами третьего 17 и четвертого 18 нормирующих преобразователей, выходы третьего 17 и четвертого 18 нормирующих преобразователей соединены с входами элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22, выход перемножителя 21 подключен к входам первого 25 и второго 26 детекторов знака, выход первого из которых соединен с входом пятого нормирующего преобразователя 19, выход которого соединен с вторым входом второго элемента ИЛИ 13, выход второго детектора 26 знака соединен с входом шестого нормирующего преобразователя 20, выход которого соединен с вторым входом третьего элемента ИЛИ 14, выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22 соединен с третьим входом второго элемента ИЛИ 13, выходы второго 13 и третьего 14 элементов ИЛИ соединены соответственно с управляющими входами третьего 29 и четвертого 30 ключей, выходы третьего 29 и пятого 31 ключей соединены соответственно с первым и вторым входами алгебраического суммирования первого сумматора 1, выходы четвертого 30 и шестого 32 ключей соединены соответственно с первым и вторым входами алгебраического суммирования второго сумматора 2, а выходы задатчика 8 начальной частоты вращения соединены с опорными входами первого 1 и второго 2 сумматоров.
Нормирующие преобразователи 15-20 установлены на входах логических элементов для создания строго определенных уровней сигналов, соответствующих состоянию "лог. 1", или "лог. 0". Сигнал высокого уровня отрицательной полярности, превышающий по модулю уровень сигнала, соответствующий состоянию "лог. 1", через диоды V1 и V2 амплитудного входного селектора и резистор R1 поступает на инвертирующий вход операционного усилителя D. Выходной сигнал на выходе операционного усилителя имеет положительную полярность и уровень, не превышающий напряжение питания операционного усилителя. Пройдя через выходной селектор, состоящий из сопротивления R6, диодов V9, V10, стабилитрона V11 и сопротивления R7, сигнал поступает на входы стандартного неинвертирующего модуля, например логического элемента ИЛИ, на выходе которого он будет иметь значение, соответствующее состояние "лог. 1". Сигнал высокого уровня положительной полярности поступает через диоды V3, V4, резистор R2 на неинвертирующий вход операционного усилителя D и далее, как в предыдущем случае, поступает через выходной селектор на входы логического элемента ИЛИ. При нулевом сигнале на входе схемы (или при сигнале низкого уровня, не превышающем прямое падение напряжения двух последовательно включенных диодов, например, V1, V2 или V3, V4) на входах операционного усилителя сигнал отсутствует, а на выходе схемы сигнал соответствует состоянию "лог. 0".
Блок пороговых значений состоит из блока М выделения модуля, задатчика Uo пороговых значений, выполненного, например, в виде источника задающих напряжений, компаратора L, нормально замкнутого ключа SW1 и нормально разомкнутого ключа SW2, причем вход блока пороговых значений совпадает с входом блока М выделения модуля и входами ключей SW1 и SW2, выходы задатчика Uo пороговых значений и блока М выделения модуля соединены с входами компаратора L, выход компаратора L соединен с управляющими входами ключей SW1 и SW2, выход ключа SW1 совпадает с первым выходом блока пороговых значений, а выход ключа SW2 - с вторым выходом блока пороговых значений. Если сигнал на входе блока пороговых значений не превышает соответствующего порогового значения, установленного с помощью задатчика Uo пороговых значений, на выходе компаратора L и, соответственно, на управляющем входе ключа SW1 сигнал отсутствует, то входной сигнал поступает на первый выход блока пороговых значений. Если входной сигнал превышает установленное пороговое значение, то ключ SW1 размыкается, а ключ SW2 замыкается и входной сигнал поступает на второй выход блока пороговых значений.
Способ осуществляется следующим образом.
Из задатчика 8 начальной частоты вращения двигателей винта и гайки, который представляет собой, например, источник задающих напряжений, на опорные входы сумматоров 1 и 2 подают сигналы заданной величины и знака. Из сумматоров 1 и 2 сигналы поступают на регуляторы частоты вращения двигателей винтового механизма 3. Знак сигналов определяет направление вращения, а величина сигналов пропорциональна начальной угловой скорости и выбирается следующим образом. Из анализа практической системы управления устанавливают динамический диапазон изменения сигнала рассогласования и, соответственно, управляющего сигнала (сигнала управления). Величину опорного сигнала от задатчика 8 выбирают таким образом, чтобы она соответствовала величине угловой скорости роторов двигателей винта и гайки, равной половине величины их номинальной угловой скорости, и при этом по абсолютному значению превышала абсолютное максимальное значение управляющего сигнала. Соответствие между половиной номинальной угловой скорости вращения роторов двигателей и начальной угловой скоростью ωo вращения винта и гайки устанавливают путем подбора требуемого коэффициента редукции. Для обеспечения приемлемого быстродействия при отработке сигнала рассогласования на различных режимах двигатели имеют запас по угловой скорости вращения, который находится в пределах 1,5-10-кратного превышения величины угловой скорости, требующейся для реализации заданной максимальной осевой скорости перемещения винта. Опорный сигнал соответствующий ωo, задают по абсолютной величине также превышающим в 1,5-10 раз абсолютное максимальное значение сигнала управления в диапазоне регулирования. Благодаря этому сигнал от задатчика 8 начальной частоты вращения двигателей по абсолютной величине всегда больше, чем абсолютное максимальное значение управляющего сигнала, и реверс двигателей винта и гайки или их остановка наступить не могут, при любом режиме работы алгебраическая сумма управляющего сигнала и опорного сигнала от задатчика 8 будет отлична от нуля и иметь знак сигнала от задатчика 8 начальной частоты вращения двигателей. Выбор величины начальной угловой скорости вращения винта и гайки, соответствующей половине номинальной угловой скорости вращения двигателей, наиболее целесообразно, так как при этом диапазон 0 < ω < 2 ωo изменения угловых скоростей без реверсов и остановок двигателей оказывается наибольшим и, соответственно, при прочих равных условиях оказывается наибольшим коэффициент запаса по угловой скорости и быстродействие. При сложении двух одинаковых по направлению вращений с одинаковыми угловыми скоростями перемещение винта в осевом направлении происходить не будет: если винт ввинчивается в гайку, то гайка свинчивается с него с той же угловой скоростью, и наоборот. Торец винта сохраняет при этом нулевое положение по осевому перемещению, но вращается (динамическое нулевое положение). Рабочий орган в зависимости от своего назначения может быть присоединен к торцу винта как жестко, так и шарнирно, например, через упорный подшипник. В последнем случае сам рабочий орган не вращается и может получать только осевые перемещения. Крутящий момент на винт передается через разъемное соединение, например шариковую шпонку. При нулевом положении сигнал на выходе датчика 4 контролируемого параметра отсутствует и его производная равна нулю. Сигнал рассогласования и управляющий сигнал также равны нулю, а сигналы на выходах блоков 10 и 11 пороговых значений и выходах первого 15 и второго 16 нормирующих преобразователей отсутствуют, что приводит к отсутствию сигнала на выходе первого элемента ИЛИ 12. Отсутствие сигнала на выходе первого элемента ИЛИ 12 поддерживает первый 27 и второй 28 ключи в замкнутом состоянии (т. н. нормально замкнутые ключи), а пятый 31 и шестой 32 ключи - в разомкнутом состоянии (т. н. нормально разомкнутые ключи). Через первый 27 и второй 28 ключи на входы перемножителя 21, а также на входы третьего 17 и четвертого 18 нормирующих преобразователей в данном случае управляющий сигнал и производная сигнала датчика 4 контролируемого параметра не доступна, так что на выходах детекторов 25 и 26 знака, а также на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22 сигналы отсутствуют. При этом третий 29 и четвертый 30 ключи находятся в разомкнутом состоянии (т. н. нормально разомкнутые ключи) и сигналы на остальные входы сумматоров 1 и 2 не поступают, винт и гайка вращаются в одинаковом направлении с одинаковыми начальными угловыми скоростями, т. е. устанавливается нулевое положение винта по осевому перемещению. В режиме выполнения программы изменения контролируемого параметра сигналы от программатора 5 подают, когда винт и гайка уже вращаются с начальными угловыми скоростями в одинаковом направлении. При появлении сигнала рассогласования между заданным и контролируемым значениями параметра возникает осевое перемещение конца винта за счет разности угловых скоростей вращения винта и гайки. Эта разность может быть как положительной, так и отрицательной, т. е. перемещение конца винта может быть возвратно-поступательным без изменения первоначально заданного направления вращения винта и гайки или их поочередных остановок, что не вызывает появление люфтов. Кроме того, это исключает также необходимость останавливать двигатели на участке программы, где не требуется перемещение рабочего органа, повышает точность выполнения программы при перемещениях рабочего органа со скоростями, близкими к нулю. Сигнал рассогласования от блока 6 сравнения поступает на вход ПИД-регулятора, а от него управляющий сигнал поступает на вход блока 10 пороговых значений. На вход блока 11 пороговых значений от дифференцирующего звена 9 поступает производная сигнала датчика контролируемого параметра. Благодаря предварительно установленной начальной угловой скорости ωo, вращения винта и гайки замедляющее действие на осевую скорость винта вращающейся с ним в одном направлении гайки компенсируется большей начальной угловой скоростью винта, определяемой суммарным сигналом, состоящим из управляющего сигнала и опорного сигнала от задатчика 8 начальной частоты вращения. В результате этого быстродействие не только не снижается, но практически повышается, так как не теряется время на выборку люфтов при отработке сигнала рассогласования.
Пусть управляющий сигнал и производная сигнала датчика 4 контролируемого параметра не превышает соответствующих пороговых значений, установленных с помощью блоков 10 и 11 пороговых значений. При этом сигналы появляются на первых выходах блоков 10 и 11 пороговых значений, а на их вторых выходах, а, следовательно, на входах элемента ИЛИ 12 и на его выходе сигналы отсутствуют. Первый 27 и второй 28 ключи при этом замкнуты и через них на входы перемножителя 21, а также на входы третьего 17 и четвертого 18 нормирующих преобразователей и, следовательно, на входы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22 поступают, соответственно, управляющий сигнал и производная сигнала датчика 4 контролируемого параметра. Если сигналы имеют различные знаки, сигнал на выходе перемножителя 21 имеет отрицательную полярность и наоборот. Первый 25 и второй 26 детекторы знака, связанные с выходом перемножителя 21, реагируют на сигналы противоположных полярностей - детектор 25 знака - на "минус", а детектор 26 знака - на "плюс". Таким образом, при различных знаках управляющего сигнала и производной сигнала датчика 4 контролирующего параметра сигнал появится на выходе первого детектора 25 знака, а следовательно, пройдя далее через пятый нормирующий преобразователь 19 и второй элемент ИЛИ 13, сигнал появится на управляющем входе третьего ключа 29, который замкнется. Четвертый ключ 30 останется разомкнутым. Поэтому на первый вход сумматора 2 управляющий сигнал не поступает и гайка винтового механизма 3 вращается с заданной начальной угловой скоростью. На первый вход сумматора 1 через замкнутый третий ключ 29 поступает управляющий сигнал и суммируется с опорным сигналом от задатчика 8 начальной частоты вращения. При положительной полярности управляющего сигнала угловая скорость вращения винта увеличивается. Отрицательная полярность управляющего сигнала вызывает уменьшение угловой скорости вращения винта.
Когда производная сигнала датчика 4 контролируемого параметра и управляющий сигнал не превышает пороговых значений и имеют одинаковые знаки, сигнал на выходе перемножителя 21 имеет положительную полярность. Это приводит к появлению сигнала на выходе второго детектора 26 знака и, следовательно, сигнал, пройдя через шестой нормирующий преобразователь 20 и третий элемент ИЛИ 14, появится на управляющем входе четвертого ключа 30, который замкнется. На первый вход сумматора 2 поступит управляющий сигнал. При положительной полярности управляющего сигнала благодаря наличию первого инвертора 23 угловая скорость вращения гайки уменьшается. Необходимость инвертирования управляющего сигнала в этом случае объясняется спецификой технического решения: знак контролируемого параметра при уменьшении угловой скорости вращения гайки такой же, как при увеличении угловой скорости вращения винта.
При отличных от нуля управляющем сигнале и производной сигнала датчика 4 контролируемого параметра сигнал на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22 отсутствует. Если же один из этих сигналов равен нулю, а второй отличен от нуля, то сигнал на выходе перемножителя 21 будет равен нулю, однако на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 22 он будет отличен от нуля, что через второй элемент ИЛИ 13 приведет к замыканию третьего ключа 29, и управляющий сигнал поступит на первый вход сумматора 1 и, соответственно, на регулятор частоты вращения двигателя винта.
Если хотя бы один из входных сигналов (управляющий сигнал или производная сигнала датчика 4 контролируемого параметра) превышает пороговое значение или они оба одновременно превысят свои пороговые значения, то на первых выходах соответственно одного или обоих блоков 10 и 11 пороговых значений, сигналы будут отсутствовать, а на их одном или обоих вторых выходах и, следовательно, на выходе первого элемента ИЛИ 12 появляется сигнал, поступающий на управляющие входы первого 27, второго 28, пятого 31 и шестого 32 ключей. При этом первый 27 и второй 28 ключи размыкаются, а пятый 31 и шестой 32 - замыкаются, подключая выход первого блока 10 пороговых значений к второму входу сумматора 1 и через второй инвертор 24 - к второму входу сумматора 2 и, соответственно, к регуляторам частоты вращения двигателей вращения винта и гайки. При положительном знаке управляющего сигнала на вход регулятора частоты вращения двигателя винта поступает сигнал положительной полярности, а на вход регулятора частоты вращения двигателя гайки - сигнал отрицательной полярности, т. е. угловая скорость вращения винта увеличивается, а гайки - уменьшается. При отрицательном знаке управляющего сигнала угловая скорость вращения винта уменьшается, а гайки - увеличивается. Таким образом, большое рассогласование между заданным параметром и контролируемым отрабатывается с большей скоростью за счет одновременного изменения частоты вращения двух двигателей.
Если производная сигнала датчика 4 контролируемого параметра превысит пороговое значение блока 11 пороговых значений, а управляющий сигнал при этом не превысит пороговое значение блока 10 пороговых значений, то через второй нормирующий преобразователь 16, второй 13 и третий 14 элементы ИЛИ на управляющие входы соответственно третьего 29 и четвертого 30 ключей поступят сигналы, ключи 29 и 30 замкнутся и управляющий сигнал поступит на первые входы сумматоров 1 и 2.
Пороговые значения управляющего сигнала и производной сигнала датчика 4 контролируемого параметра устанавливаются эмпирически, например, как четверть их установленных максимальных значений. Очевидно, что малое по величине рассогласование можно отработать с большей динамической точностью изменением частоты вращения (по сравнению с начальной) одного двигателя. При отработке сигнала рассогласования только с помощью имеющегося в системе ПИД-регулятора повышение динамической точности за счет уменьшения перерегулирования входит в противоречие с быстродействием: можно уменьшить перерегулирование и даже исключить его, однако при этом снизится быстродействие. Благодаря специфике данного технического решения можно при практическом сохранении максимально возможного быстродействия, достигаемого при наличии выбранного ПИД-регулятора, уменьшить или вообще устранить перерегулирование. Изучение реакции данной системы управления на единичное скачкообразное воздействие при установленной начальной угловой скорости ωo, вращения винта и гайки показывает следующее для двух случаев: при соответствующей настройке системы в первом случае, когда сигнал рассогласования будет отрабатываться изменением угловой скорости двух двигателей одновременно, переходный процесс будет иметь колебательный характер, а во втором случае, когда сигнал рассогласования будет отрабатываться изменением угловой скорости одного двигателя, при прочих равных условиях переходный процесс будет апериодическим. Таким образом, улучшаются эксплуатационные характеристики при возвратно-поступательном движении рабочего органа в системах управления винтовыми механизмами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ испытания образца материала на прочность при осевом нагружении | 1990 |
|
SU1758494A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| Устройство для адаптивного управления шлифовальным станком | 1987 |
|
SU1414594A1 |
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1987 |
|
SU1507241A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Стенд для диагностирования технического состояния транспортных средств | 1988 |
|
SU1543280A1 |
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
Изобретение относится к автоматическому управлению, в частности к автоматизации процессов управления перемещениями рабочих органов устройств с помощью винтовых механизмов. Цель изобретения - улучшение эксплуатационных характеристик при возвратно - поступательном движении рабочего органа. Для этого в винтовом механизме предварительно приводят в синхронное вращение от отдельных двигателей винт и гайку в одном направлении с одинаковой угловой скоростью и в дальнейшем отрабатывают рассогласование между заданным и контролируемым значениями параметра, вращая винт и гайку с разными угловыми скоростями в том же первоначальном направлении вращения, причем в зависимости от величины сигнала рассогласования его отрабатывают либо изменением угловой скорости вращения двух двигателей одновременно, либо изменением угловой скорости одного двигателя. В устройство введены элементы, позволяющие осуществить автоматическое управление не только с учетом величины и знака сигнала рассогласования, но и с учетом величины и знака производной сигнала контролируемого параметра. Способ и устройство позволяют реализовать управление винтовым механизмом без возникновения люфтов в кинематической цепи между местом соединения винта с рабочим органом и двигателями, а также без возникновения неплавного осевого движения винта при скоростях, близких к нулю. 2 с. п. ф-лы, 3 ил.
