113
Изобретение относится к области робототехники и может быть использовано при создании сборочных роботов.
Целью изобретения является яовыше нне быстродействия за счет выбора оптимальной траектории движения при управлении усилием,
На фиг,1 изображена функциональная схема устройства; на фиг. 2 - диаграммы фазовых траекторий движения устройства; на фиг. 3 - временные диаграммы работы устройства.
Устройство содержит задатчик 1 скорости, первый сумматор 2, усилитель 3, блок 4 коррекции, первый коммутатор 5, привод 6f исполнительный механизм 7, датчик 8 скорости, датчик 9 усилия, задатчик 10 усилия, второй коммутатор 11, второй сумматор 12, второй усилитель 13, пороговый элемент 14, третий усилитель 15, третий сумматор 16, элемент 17 с односторонней проводимостью, четвертый сумматор 18, четвертый усилитель 19, задающий орган 20.
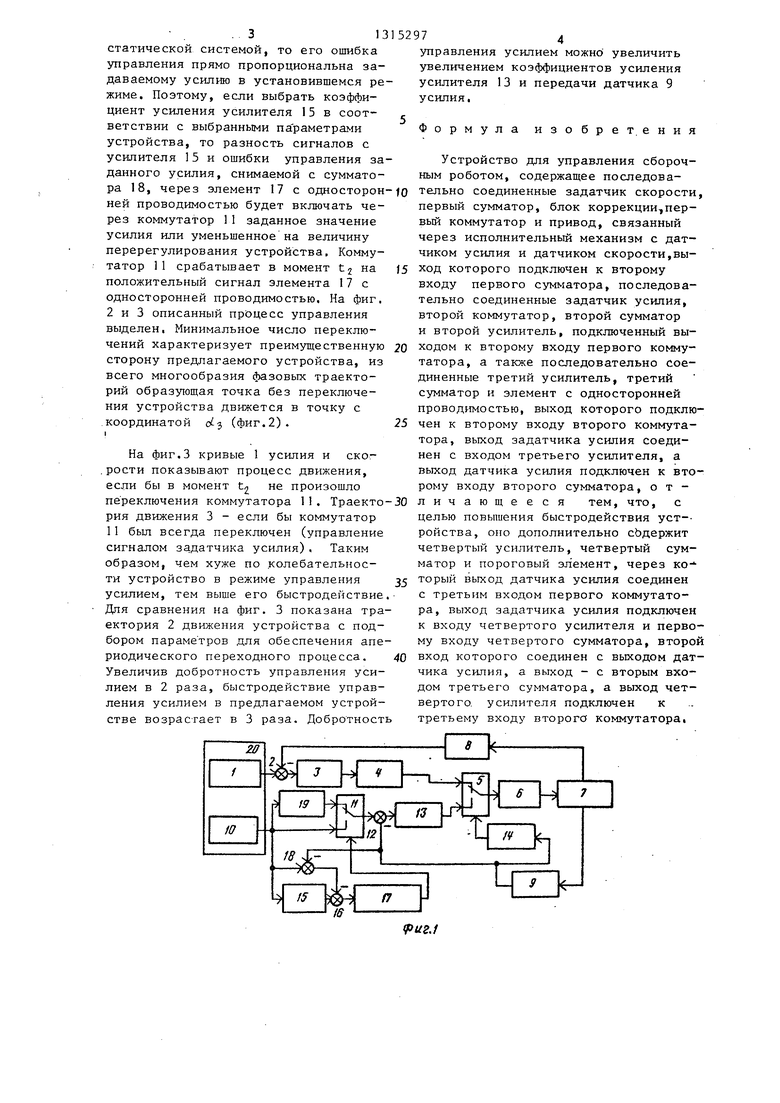
На фиг, 2 обозначены d - координата перемещений привода; cL- координата ограничения движения; d координата включения порогового элемента; координата перемещения привода для достижения заданного значения усилия; dcf/dt - координата скорости; V-, - заданное значение скорости.
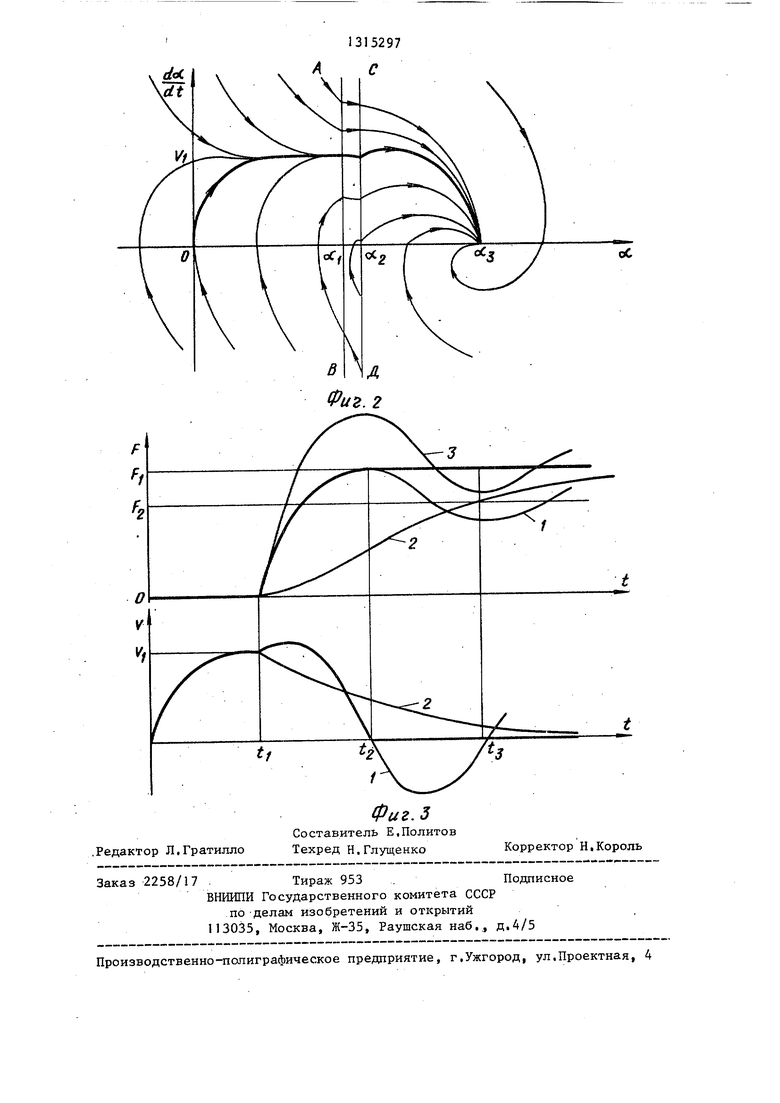
На фиг, 3 указаны F и F2 - заданные значения усилия.
Устройство работает следующим образом.
С задатчика 1 скорости поступает сигнал на обработку приводоь 6 заданной скорости.для исполнительного механизма 7, который представляет собой исполнительный орган робота, содержащий механизм преобразования движения, схват и т.д. Этот сигнал, вычитая сигнал с датчика 8 скорости, поступает через усилитель 3, блок 4 коррекции и коммутатор 5 на привод 6. Это движение привода выделено (фиг,2) на участке, ограниченном осью и линией АВ, определяемой di , и на участке О-t-i (фиг,3) при движении исполнительного органа с заданной скоростью V, « Так как в основном используют деформацию упругих элементов в применяемых датчиках 9 усилия с целью определения развиваемого усилия, то параметр о(}- di определяет эту деформацию,пря72
МО пропорциональную задаваемому усилию, В сборочных операциях координата oi представляет собой координату контакта сопрягаемых деталей. На
участке правее линии АВ (фиг.2) показано движение привода в упругой зоне датчика 9 усилия, На участке между параллельными оси dci/dt линией АВ и линией СД, определяемой координатой
(у (,11Г,2) произошло естественное изменение режима регулирования скорости. Параметр (фиг,2) ci-2 - oi, определяет величину порога срабатывания порогового элемента 14, который
конструктивно представляет собой релейный элемент, у которого скачкообразно изменяемый выходной сигнал определяет сигнал управления коммутатора 5, а зона нечувствительности входного сигнала определяет порог срабатывания этого элемента. Величина зоны нечувствительности складьтается . из естественно присутствующих времени срабатывш ия и отпускания и из
специального вводимого значения для надежного контакта собираемых деталей и исключения ненужных силовых воздействий (вес собираемой, детали, ее подвижное закрепление и-т.д,). После
срабатьшания коммутатора 5 устройство начинает работать в режиме управления усилием. На фиг, 2 этот режим показан правее линии СД; на фиг. 3 - на участке t з - задатчикя 10 усиЛИЯ поступает сигнал на отработку
приводом 6 заданного усилия (это значение на фиг, 3 показано значением F). Этот сигнал, проходя через усилитель 19 и вычитая сигнал с датчика 9 усилия, поступает через усилитель 13 и коммутатор 5 на привод 6,
Коэффициент усиления усилителя 19 выбирается равным 1/(1+т), где m - величина перерегулирования устройства в режиме управления усилием. Поэтому на временном участке t - t (фиг,3) заданное значение усилия со- ответствует значению F- . По величине F2 F - mF, В момент t текущее значение усилия равно F , т,е, соответствует значению сигнала с заатчика 10 усилия. В этот момент коммутатор 11 с помощью схемы элементов 15-18 соединит задатчик 10 усиЛИЯ с входом сумматора 12, в результате чего на участке t - tj усилие соответствует заданному F , а скорость равна О, Поскольку устройство в режиме управления усилием является
статической системой, то его ошибка управления прямо пропорциональна задаваемому усилию в установившемся режиме. Поэтому, если выбрать коэффициент усиления усилителя 15 в соответствии с выбранными па раметрами устройства, то разность сигналов с усилителя 15 и ошибки управления заданного усилия, снимаемой с сумматора 18, через элемент 17 с односторон-fo тельно соединенные задатчик скорости.
ней проводимостью будет включать через коммутатор 11 заданное значение усилия или уменьшенное на величину перерегулирования устройства. Коммутатор 11 срабатывает в момент t на положительный сигнал элемента 17 с односторонней проводимостью. На фиг, 2 и 3 описанный пр&цесс управления выделен, Минимальное число переключений характеризует преимущественную сторону предлагаемого устройства, из всего многообразия фазовьгк траекторий образующая точка без переключения устройства движется в точку с
координатой с/з (фиг.2). I
На фиг.З кривые 1 усилия и ско- .рости показывают процесс движения.
если бы в момент t-i
не произошло
пе реключения коммутатора 1 1 . Траекто-30 личаюшееся тем, что, с
рия движения 3 - если бы коммутатор 11 был всегда переключен (управление сигналом задатчика усилия), Таким образом, чем хуже по колебательности устройство в режиме управления 35 усилием, тем выше его быстродействие. Для сравнения на фиг. 3 показана траектория 2 движения устройства с подбором параметров для обеспечения апериодического переходного процесса. 40 Увеличив добротность управления усилием в 2 раза, быстродействие управления усилием в предлагаемом устройстве возрастает в 3 раза. Добротность
управления усилием можно увеличить увеличением коэффициентов усиления усилителя 13 и передачи датчика 9 усилия,
Формула изобретения
Устройство для управления сборочным роботом, содержащее последовапервый сумматор, блок коррекции,первый коммутатор и привод, связанный через исполнительный механизм с датчиком усилия и датчиком скорости,выход которого подключен к второму
входу первого сумматора, последовательно соединенные задатчик усилия, второй коммутатор, второй сумматор и второй усилитель, подключенный выходом к второму входу первого коммутатора, а также последовательно соединенные третий усилитель, третий сумматор и элемент с односторонней проводимостью, выход которого подключен к второму входу второго коммутатора, выход задатчика усилия соединен с входом третьего усилителя, а выход датчика усилия подключен к второму входу второго сумматора, о т целью повышения быстродействия уст-- ройства, оно дополнительно сЪдержит четвертый усилитель, четвертый сумматор и пороговый элемент, через ко- торый выход датчика усилия соединен с третьим входом первого коммутатора, выход задатчика усилия подключен к входу четвертого усилителя и первому входу четвертого сумматора, второй вход которого соединен с выходом датчика усилия, а выход - с вторым входом третьего сумматора, а выход четвертого, усилителя подключен к третьему входу второго коммутатора.
UZ. 2
. Редактор Л.Гратилло
Составитель Е.Политов Техред Н.Глущенко
Заказ 2258/17 . Тираж 953 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг.З
Корректор Н,Король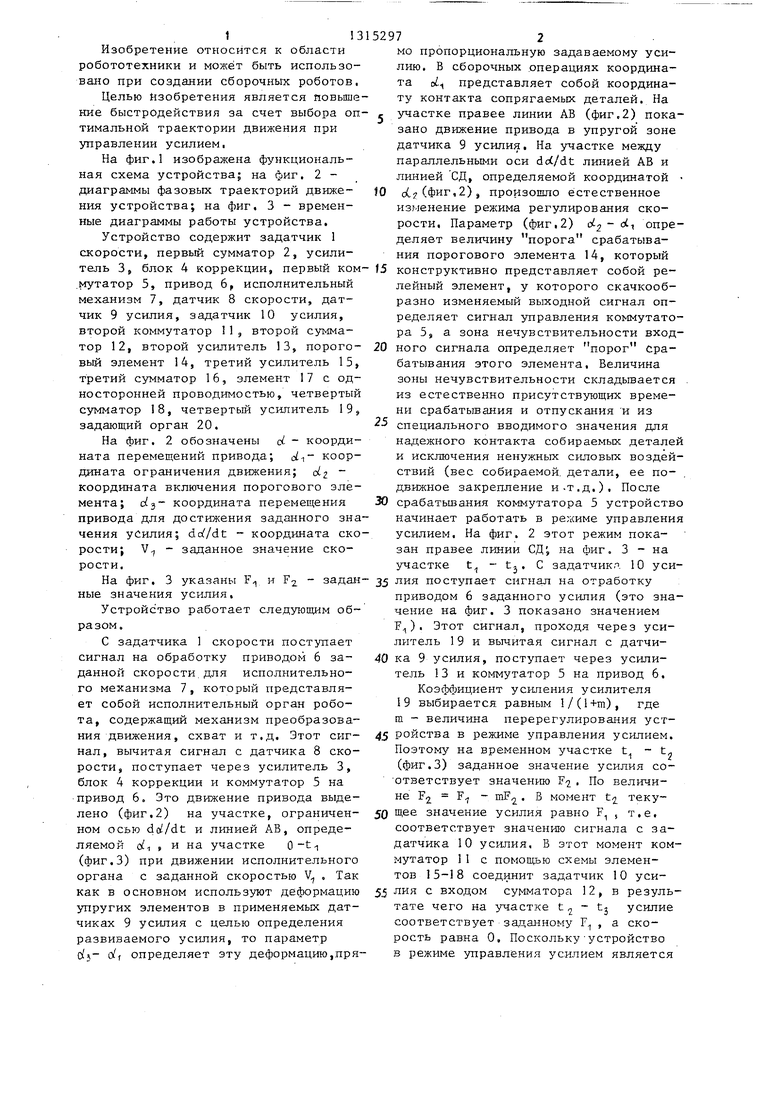
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Устройство для управления сборочным роботом | 1985 |
|
SU1247839A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1414624A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
Изобретение относится к области робототехники и может быть использовано при создании сборочных роботов. Целью изобретения является повышение быстродействия за счет выбора оптимальной траектории движения при управлении усилием. Для этого в устройство, содержащее задатчики усилия и скорости, блок коррекции, коммута- таторы, датчики усилия и скорости , сумматоры, привод с исполнительным механизмом, введены пороговый элемент, дополнительные усилитель и сумматор. 3 ил. СлЭ СП N5 СО 
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
