Изобретение относится к электротехнике и предназначается для высокоточных электроприводов, в частности, звуки- и ви- деозаписывающих устройств
Цель изобретения - повышение равномерности частоты вращения двигателя путем повышения точности формирования управляющего воздействия,
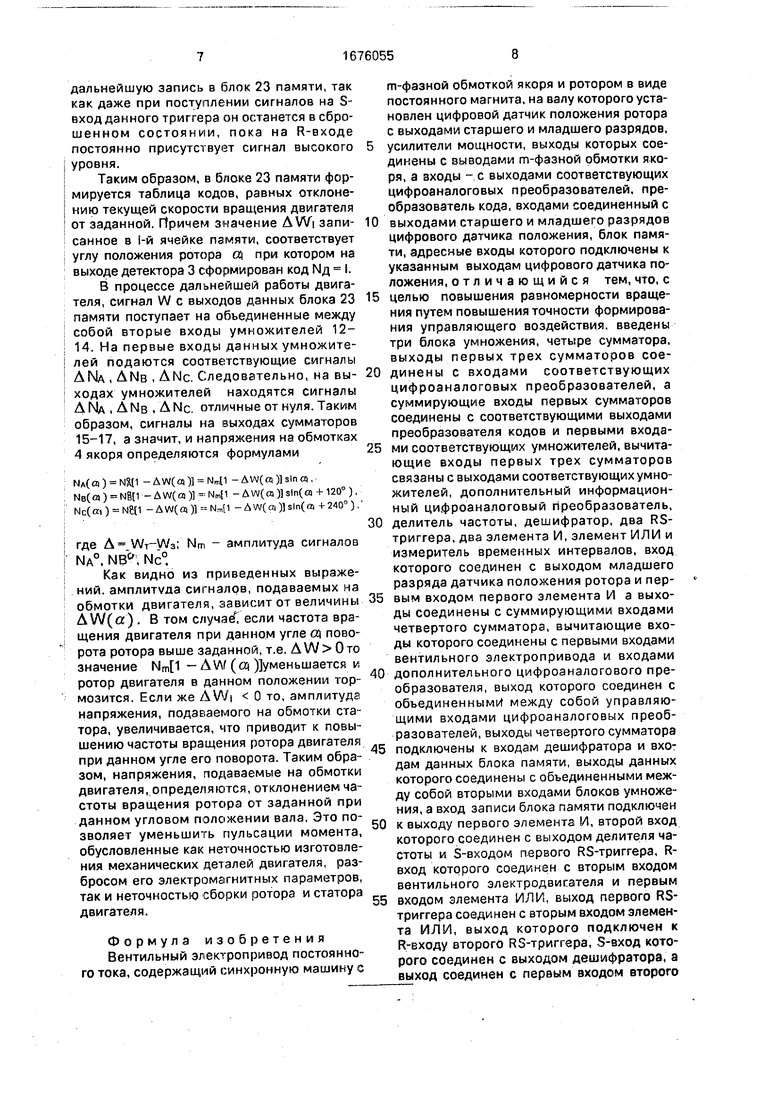
На фиг, 1 представлена блок-схема цифрового бесконтактного двигателя; на фиг. 2 г временные диаграммы работы отдельных блоков схемы,
Вентильный электропривод содержит синхронную машину с ротором 1 в виде постоянного магнита, на валу которого установлен цифровой датчик положения, составленный из кодового датчика 2 и детектора 3, оптически связанного с кодовым датчиком 2. Обмотки 4 якоря синхронной машины подключены к выходам соответствующих усилителей 5 и 7 мощности, входы которых соединены с выходами соответствующих цифроаналоговых преобразователей (ЦАП) 8-10. Вентильный электропривод содержит преобразователь 11 кода, входами подключенный к выходам детектора 3 датчика положения ротора. Дополнительно вентильный электропривод содержит три блока 12 и 14 умножения и три сумматора 15-17, выходы которых соединены с входами соответствующих ЦАП 8-10, суммирующие входы связаны с соответствующими выходами преобразователя 11 кодов и первыми входами соответствующих блоков 12-14 умножения, вычитающие входы сумматоров связаны с выходами соответствующих блоков 12-14 умножения. Также введены дополнительный ЦАП 18, измеритель 19 временных интервалов и четвертый сумматор 20, суммирующие входы которого подключены к выходам измерителя 19, вход которого связан с младшим разрядом детектора 3 положения ротора двигателя, вычитающие входы сумматора 20 соединены с входами 21 схемы вентильного электропривода и
входами дополнительного 18, выход которого связан с объединенными между собой управляющими входами ЦАП 8-10. Выходы сумматора 10 подключены к входам дешифратора 2 и входам данных блока 23
памяти связаны с объединенными между собой вторыми входами блоков 12-14 умножения, Адресные входы блока 23 памяти соединены с соответствующими выходами детектора 3 датчика положения ротора.
Вход записи блока 23 памяти подключен к выходу элемента И 24, первый вход которого соединен с выходом младшего разряда датчика положения ротора, а второй вход соединен с выходом делителя 25 частоты и
S-входом первого RS-ipnrrepa 26, R-вход RS-григгера 26 подключен к второму входу 27 вентильного электропривода и первому входу эпемента ИЛИ 28. Выход RS-триггера 25 соединен с вторым входом элемента ИЛИ
28. Выход элемента ИЛИ 28 подключен к R-входу второго Р5 триггера 29, S-вход которого соединен с выходом дешифратора 22, Выход RS-триггера 29 связан с первым входом элемента И 30, второй вход которого
подключен к выходу старшего разряда датчика положения ротора. Выход элемента И 30 соединен с входом делителя частоты 25. Вентильный электропривод постоянно- то тока работает следующим образом.
Импульсный сигнал высокого уровня,
поданный на вход 27 электропривода, поступает на R-вход RS-триггера 26 и R-вход RS-триггера 29 через элемент ИЛИ 28, сбрасывает оба триггера в ноль и приводит схему в исходное состояние. Кроме того, в исходном состоянии на входах 21 электропривода задано нулевое значение кода и заданной частоты вращения синхронной машины и ее ротор находится в неподвижном положении, а во всех ячейках блока 23 памяти находятся нулевые значения кодов. Запуск асинхронной машины (двигателя) производится гюдзчей на входы 21 кода УУз Ф 0 заданной частоты вращения. При этом сигналы Do, Di, D2, Оз с детектора
3 датчика положения ротора через преобразователь 11 кодов поступают в виде трех синусоидальных сигналов NA°, NB . Nc°, сдвинутые между собой на 120 эл.град.лна суммирующие входы соответствующих сумматоров 15-17 и на первые входы блоков 12-14 умножения. На вторые же входы соответствующих умножителей в это время подаются нулевые значения с выходов данных блоков 23 памяти. Таким образом, на вычитающие входы сумматоров 15-17 с выходов блоков умножения при разгоне двигателя подаются нулевые коды, а с выходов сумматоров на входы соответствующих ЦАП - сигналы NA NA°, NB NB° и Nc Nc°. Далее, аналоговые сигналы с соответствующих выходов ЦАП 8-10 преобразуются в усилителях 5-7 мощности в напряжения UA, UB, Uc, подаются на обмотки 4 якоря синхронного двигателя. Причем преобразователь 11 кодов преобразует цифровой код с выхода детектора 3 таким образом, что магнитные поля ротора и статора сдвинуты на 90 эл.град, что обеспечивает максимум момента двигателя. Частота вращения ротора при этом задается амплитудой синусоидального напряжения на обмотках статора. Изменение данной амплитуды достигается с помощью изменения опорного напряжения Uon ЦАП 8-10. В свою очередь значения Don формируется ЦАП 18 пропорционально сигналу (коду) W3 заданной частоты вращения. Таким образом, напряжения, подаваемые на обмотки 4 двигателя, определяются выражениями
UA NAUon NAWa,
UB NeUon NBW3,
Uc NcUon NcW3.
В процессе вращения ротора измеритель временных интервалов 19 осуществляет измерение текущей частоты вращения ротора. Для этого используется младший разряд Do (фиг.2) датчика положения ротора. Измерение ведется путем заполнения сигналом высокой частоты импульса, равного по длительности временному интервалу между двумя соседними фронтами, сигнала Do с датчика положения ротора. Число высокочастотных импульсов, заполняющих низкочастотный сигнал Do. обратно пропорционально частоте вращения двигателя, а выходной сигнал WT измерителя 19 пропорционален текущей частоте вращения двигателя. Следовательно, с выхода измерителя 19 на суммирующий вход сумматора 20 при каждом новом значении кода на выходе датчика положения ротора
двигателя будет подаваться измеренное значение WT его текущей частоты вращения. Как только двигатель достигнет заданной частоты вращения, значения на
суммирующих входах сумматора 20 станут равными значениями на вычитающих входах сумматора. Поэтому на выходах сумматора будем иметь . Данное значение A , поступая на входы дешифратора 22,
дает появление логической единицы в виде сигнала Uw на его выходе (фиг.2). Этот сигнал, поступая на S-вход RS-триггера 29, устанавливает его в единичное состояние Uri 1. Сигнал Ur2 высокого уровня с выхода RS-триггера 29, поступая на вход элемента И 30, разрешает прохождение сигнала от старшего разряда DN (N 1,2,3) детектора положения ротора на вход делителя 25 частоты.
Как только на вход делителя частоты
поступит отрицательный фронт сигнала с вухода элемента И 30, что соответствует установке на выходе детектора 3 кода, равного нулю Мд 0, то на выходе делителя
частоты появится напряжение Ug высокого уровня, которое будет удерживаться в течении одного оборота ротора Этот сигнал, поступая на вход элемента И 24, выходным сигналом U3 разрешит прохождение сигнала с выхода младшего разряда Do детектора положения ротора на вход записи блока 23 памяти. По положительным и отрицательным фронтам этого сигнала в блок памяти записывается, поступая с выхода сумматора, код рассогласования A W, который равен разности между значениями текущей WT и заданной W3 ркорости. Эти величины связаны с пульсацией скорости, определяемой как неточностью изготовления механических
деталей двигателя, разбросом их электромагнитных параметров, так и неточностью сборки ротора и статора двигателя, Причем в блоке памяти записываются значения для каждого из кодов детектора положения ротора, а следовательно, для всех углов поворота ротора 1 относительно статора 4.
С появлением следующего нулевого значения кода Мд 0 с выходов детектора положения ротора на выходе делителя 25
частоты установится низкий уровень, который, приходят на вход элемента И 24, запретит дальнейшее прохождение сигналов записи на вход записи блока 23 памяти. Кроме того, отрицательный перепад сигнала Ug с выхода делителя 25, поступив на S-вход RS-триггера 26, установит триггер в единичное состояние и его сигнал Urijпоступив через элемент ИЛИ 28 на R-вход RS- триггера 29 и сбросив его в ноль, запретит
дальнейшую запись в блок 23 памяти, так как даже при поступлении сигналов на S- вход данного триггера он останется в сброшенном состоянии, пока на R-входе постоянно присутствует сигнал высокого уровня.
Таким образом, в блоке 23 памяти формируется таблица кодов, равных отклонению текущей скорости вращения двигателя от заданной. Причем значение Д W| записанное в 1-й ячейке памяти, соответствует углу положения ротора сс при котором на выходе детектора 3 сформирован код Мд I.
В процессе дальнейшей работы двигателя, сигнал W с выходов данных блока 23 памяти поступает на объединенные между собой вторые входы умножителей 12- 14. На первые входы данных умножителей подаются соответствующие сигналы АМд , ANe , ЛМс. Следовательно, на выходах умножителей находятся сигналы A NA , A NB , Л NC. отличные от нуля, Таким образом, сигналы на выходах сумматоров 15-17, а значит, и напряжения на обмотках 4 якоря определяются формулами
мЛ(а) -AW(oi)l -Aw(«)sina,
NB(a)) -AW(ra) - A W( « )sln( 01 + 120°), Nc(ai) -AW(ai) Nn,1 -AW(d ) sln(a,+240° ) ,
где A Wr-Ws; Mm - амплитуда сигналов NA°, NB&, Nc°.
Как видно из приведенных выражений, амплитуда сигналов, подаваемых на обмотки двигателя, зависит от величины AW(a) . В том случае если частота вращения двигателя при данном угле а поворота ротора выше заданной, т.е. значение - AW(ct| )уменьшается и ротор двигателя в данном положении тормозится. Если же AW| 0 то, амплитуда напряжения, подаваемого на обмотки статора, увеличивается, что приводит к повышению частоты вращения ротора двигателя при данном угле его поворота. Таким образом, напряжения, подаваемые на обмотки двигателя, определяются, отклонением частоты вращения ротора от заданной при данном угловом положении вала. Это позволяет уменьшить пульсации момента, обусловленные как неточностью изготовления механических деталей двигателя, разбросом его электромагнитных параметров, так и неточностью сборки ротора и статора двигателя.
Формула изобретения Вентильный электропривод постоянного тока, содержащий синхронную машину с
m-фазной обмоткой якоря и ротором в виде постоянного магнита, на валу которого установлен цифровой датчик положения ротора с выходами старшего и младшего разрядов,
усилители мощности, выходы которых соединены с выводами m-фазной обмотки якоря, а входы - с выходами соответствующих цифроаналоговых преобразователей, преобразователь кода, входами соединенный с
0 выходами старшего и младшего разрядов цифрового датчика положения, блок памяти, адресные входы которого подключены к указанным выходам цифрового датчика положения, отличающийся тем, что, с
5 целью повышения равномерности вращения путем повышения точности формирования управляющего воздействия, введены три блока умножения, четыре сумматора, выходы первых трех сумматоров сое0 динены с входами соответствующих цифроаналоговых преобразователей, а суммирующие входы первых сумматоров соединены с соответствующими выходами преобразователя кодов и первыми входа5 ми соответствующих умножителей, вычитающие входы первых трех сумматоров связаны с выходами соответствующих умножителей, дополнительный информационный цифроаналоговый преобразователь,
0 делитель частоты, дешифратор, два RS- триггера, два элемента И, элемент ИЛИ и измеритель временных интервалов, вход которого соединен с выходом младшего разряда датчика положения ротора и пер5 вым входом первого элемента И а выходы соединены с суммирующими входами четвертого сумматора, вычитающие входы которого соединены с первыми входами вентильного электропривода и входами
0 дополнительного цифроаналогового преобразователя, выход которого соединен с объединенными между собой управляющими входами цифроаналоговых преобразователей, выходы четвертого сумматора
5 подключены к входам дешифратора и входам данных блока памяти, выходы данных которого соединены с объединенными между собой вторыми входами блоков умножения, а вход записи блока памяти подключен
0 к выходу первого элемента И, второй вход которого соединен с выходом делителя частоты и S-входом первого RS-триггера, R- вход которого соединен с вторым входом вентильного электродвигателя и первым
5 входом элемента ИЛИ, выход первого RS- триггера соединен с вторым входом элемента ИЛИ, выход которого подключен к R-ЕХОДУ второго RS-триггера, S-вход которого соединен с выходом дешифратора, а выход соединен с первым входом второго
элемента И, второй вход которого подключен к выходу старшего разряда цифрового
положения ротора, а выход подключен к входу делителя частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1985 |
|
SU1324088A1 |
| Вентильный электропривод | 1985 |
|
SU1309242A1 |
| Позиционный электропривод постоянного тока | 1986 |
|
SU1432707A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751836A1 |
| Устройство для автоматического контроля нагрева горных машин | 1991 |
|
SU1758242A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
Изобретение относится к электротехнике и предназначено для высокоточных электроприводов, в частности звука- и виде- оааписывающих устройств. Цель изобретения - повышение равномерности частоты вращения путем повышения точности формирования управляющего воздействия, С этой целью в вентильном электроприводе постоянного тока цифроаналоговые преобразователи 8-10 подключены к усилителям 5-7 мощности. Электропривод содержит также преобразователь 11 кода, три блока 12-14 умножения и три сумматора 15-17,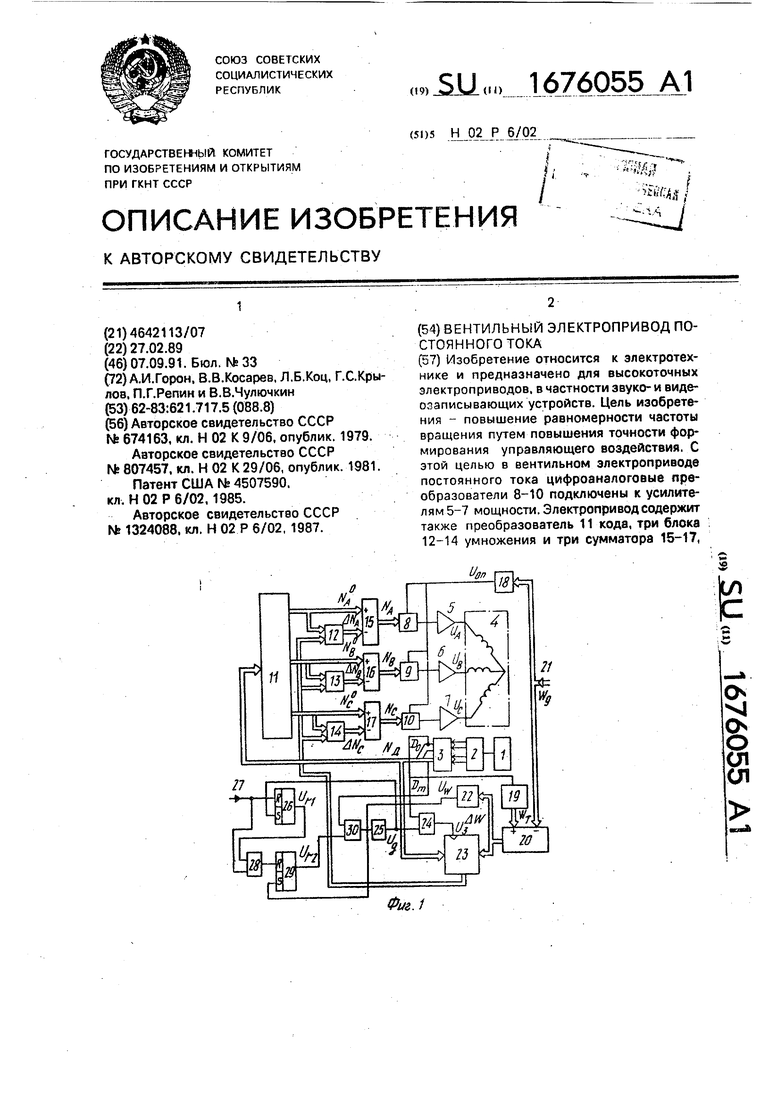
Ц
v
-JT
U,
ft
IJOTlJnjnJTJTJnJ JT
J
з.
И
1
Фиг. В
1
J
1
| Вентильный электропривод | 1974 |
|
SU674163A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Электропривод с вентильным двигателем | 1979 |
|
SU807457A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Патент США № 4507590, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1985 |
|
SU1324088A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
