Изобретение относится к электротехнике и может быть использовано в прецизионных устройствах и следящих системах.
Цель изобретения - повышение энергетических показателей и точности с,табилизации момента.
На фиг, 1 приведена ф -нкциональ- ная схема моментного вентильного элек т ропривода; на фиг. 2 и 3 - примеры выполнения разделителя сигнала на 1);елую и дробную части; на фиг.4 - фунтщиональная схема управления функ- ицтональным преобразователем. I Вентильный электропривод содержит Ынхронный электродвигатель 1 (фиг.1) t двухфазной обмоткой якоря 2 ротор- 1ндуктор 3 которого механически свя- ран с датчиком 4 положения ротора, |цва усилителя 5 мощностиj два датчика 6 тока, каждый из которых включен я обратную связь соответствующего усилителя 5 мощности.
Выходы усилителей 5 мощности подключены к обмотке якоря 2 синхронного электродвигателя 1. В состав вен тильного электропривода входят постоянное запоминающее.устройство 7, два функциональных преобразователя 8, входы которых связаны с выхода {й постоянного запоминающего устройства 7, а выходы - с входами соответ- СТВУЮ1Щ1Х усилителей 5 мощности
Кроме того, электропривод содержит задатчик 9 момента, два разделителя Ю и 11 сигнала на целую и дроб- ,ную части. Функциональные преобразователи 8 вьтолнены управляемыми и: реализуют функцию
4 1. Я (,м),м), ,.
м где IK - оптимальное значегае тока
в k-й фазе обмотки якоря 2; х - коэффициенты аппроксимации / функдай fic(,M); f|(oC,M)- коорди.наты функций аппроксимации ;
- угол поворота ротора М - задаваемьй электромагнитный момент i
2 ,М,оС,М - целые и дробные части параметров и Н соответственно.
Выходы датчика 4 положения ротора и задатчика 9 момента подключены соответственно к разделителям 10 и П сигналов на целую и дробную части.
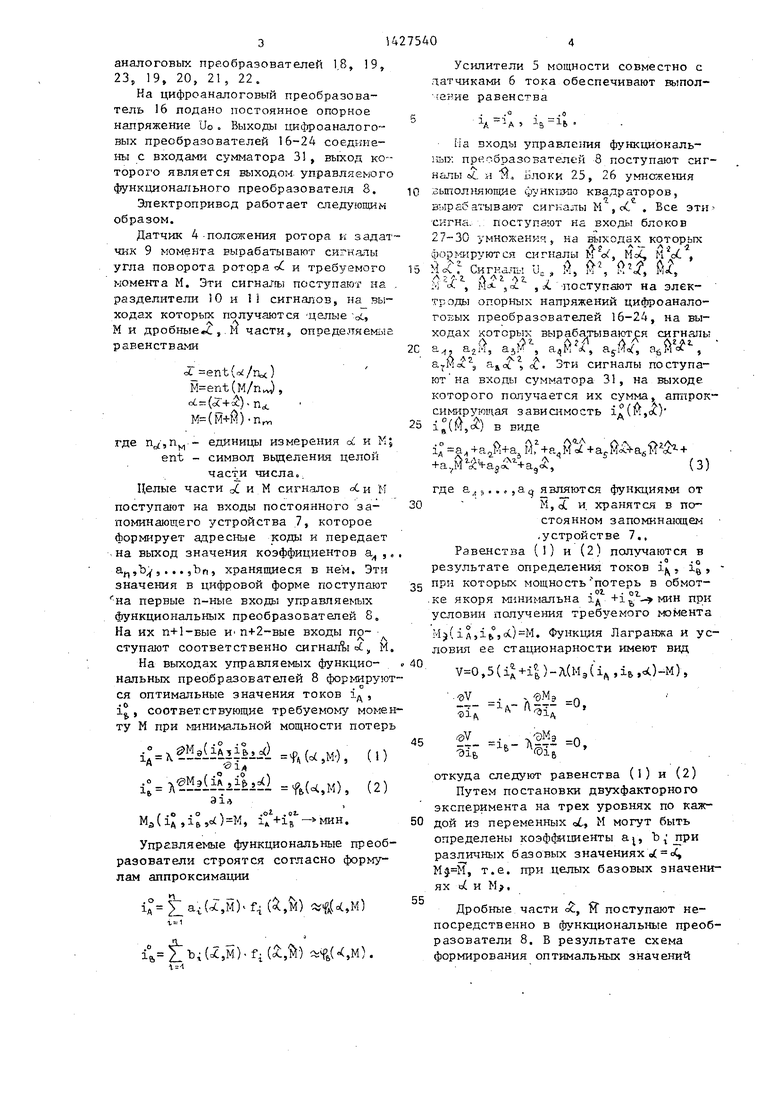
Выходы целой части разделителей 10 и 11 сигналов подключены к входам постоянного запоминающего устройства 7, а выходы дробной части разделителей 10 и 11 сигналов - к входам управления функциональных преобразователей 8. Каждый разделитель сигналов на целую и дробную части может содержать
Q аналого-цифровой преобразователь 12 (фиг. 2), ьыход которого соединен с . входом цифроаналогового преобразователя 13, выходом соединенного с инвертирующим входом сумматора 14. Вхо5 дом разделителя 10 является вход аналого-цифрового преобразователя 12 и неинвертирующий вход сумматора 14, а на их выходах формируются соответст- венно целая оС и дробная ci части сиг0 налйс .
1 ,
При выполнении датчика положения ротора и задатчика момента с цифровыми выходами разделители сигналов
5 выполняются в виде цифроаналогового преобразователя 15 (фиг. 3). При этом входь преобразователя 15 подключают к группе младших значащих разрядов, а старшие, значащие разря0 ды - к входу постоянного запоминающего устройства 7.
Управляемьй функциональный преобразователь 8 вьшолнен на девяти цифроаналоговых преобразователях 165 24, щести блоках 25-30 умножения (фиг, 4) и одном сумматоре 31. Десятый аналоговый вход (о) управляемого функционального преобразователя 8 соединен с двумя входами блока 26
0 умножения, с .входами блоков 28 и 27 умножения и с электродом опорного напряжения щ фроаналогового преобразователя 24.
Oд iннaдцaтьй аналоговый вход М
5 функционального преобразователя 8
соединен с двумя входами блока 25 умножения, с входом,блока 30 умножения и с вторым вх-одом блока 28 умножения, а также с электродом опорного
г, напряжения цифроаналогового преобра- зователя 17. Выход блока 25 умножения соединен с вторым входом блока 25 умножения и с входом блока 29 уьг- ножения.
еВыход блока 26 умножения соединен
с вторыми входагда блоков 29 и 30 умножения. Выходы блоков 25-30 умножения соединены с электродами опорного напряжения соответственно цифроаналоговых преобразователей 18, 19, 23, 19, 20, 21, 22.
Ка цифроаналоговый преобразователь 16 подано постоянное опорное напряжение Uo. Выходы цифроаналого- вых преобразователей 16-24 соединены с входами сумматора 3, выход которого является выходом управляемого функционального преобразователя 8.
Электропривод работает следующим образом.
Датчик 4-положения ротора к задат- чик 9 момента вырабатывают сигн,-дль угла поворота ротора / и требуемого момента М. Эти сигналь поступают на . разделители 0 н li сигналов, на выходах которых получаются целые -оС М и дробные«-С 5, М части, определяемыг равенствами
ci ent() (M/nJ, М(М+Й)-п
а,Йо а& о. Зти сигналы поступают на входы сумматора 31, на выходе которого получается их сумма , аппрок симирующая завиа мость i°
25 1°(м,о(.) в виде где ,п,- единицы измерения и ..ft+a rl%a,,,f +
+а,Й н-аз4 Ча,,(З)
ent - символ выделения цело1
части числа.
Целые части cZ и М сигналов °С и М поступают на входы постоянного запоминающего устройства 7, которое формирует aApeciibie коды и передает на выход значения коэффициентов а ,. а,,Ь;,... ,Ъг,, хранящиеся в нем. Эти значения в цифровой форме поступают -на первые п-ные входы управляемых функциональных преобразователей 8. На их n+1-вые И п+2 вые входы по- - ступают соответственно сигна й сС,, М,
На выходах управляемых функциональных преобразователей 8 форг-мруют- ся оптимальные значения токов 1д , i, соответствующие требуемому момен ту М при минимальной мощности потерь
где а. 5.., ,а( являются функциями от 30 М, сзС и хранятся в постоянном запомкншсщем -устройстве 7,,
Равенства () и (2) получаются в результате определения токов i. i, or при которых мощность потерь в обмот. 01 . 07.
.ке якоря минимальна тд при условии получения требуемого момента
Mj( i А,,оС)-М. Функция Лагранжа и ус ловия ее стационарности имеют вид
,5()(M9(ift.ib.«t)-M), .«V . , Э.Мэ f.
и; , 45 l. i,. 0, -dib IE,
,(iA,i|,5() ,
X : jiiA,i. ,M ),
..
(1)
(2)
i;. f,(c,M),
91л
Ма()М, i° +i; - MHH.
Управляемые функциональные преобазователи строятся согласно формуам аппроксимации
Гi. J; ,и. f (5,м) f,(ot,M)
г 1
biU,M).f.(,) AfJ,M)
о
з-ь
1
Усилители 5 мощности совместно с датчиками б тока обеспечивают выпол- шкие равенства
..0..0
IA -A
На входы управления функциональ- libiy. преобразователей 8 поступают сигналы &/. и И, Блоки 25, 26 умножения выполняющие функп по квадраторов,
вырабатывают сигналы M jcC , Все этн сигна. . поступают на входы блоков 27-30 умноженкч, на выходах которых
л лл -- Л я 5
Форг-шруются сигналы К о(, HaL М сС ,
МХГ Сигналы , И, Р, R Azf г. А г- Л2. /
: л , Mi. ,01. , л. -иоступают на элек-
троды опорных напряжений цифроанало- говых преобразователей 16-24, на вы
ходах которых вырабатываются сигналы л .л 7. Л г -л Л Л2 t
а, aoi-f, , а,МЧ, , ,
а,Йо а& о. Зти сигналы поступают на входы сумматора 31, на выходе которого получается их сумма , аппрок™ симирующая завиа мость i°
1°(м,о(.) в виде ..ft+a rl%a,,,f +
где а. 5.., ,а( являются функциями от М, сзС и хранятся в постоянном запомкншсщем -устройстве 7,,
Равенства () и (2) получаются в результате определения токов i. i, - при которых мощность потерь в обмот. 01 . 07.
ке якоря минимальна тд при условии получения требуемого момента
Mj( i А,,оС)-М. Функция Лагранжа и условия ее стационарности имеют вид
,5()(M9(ift.ib.«t)-M), .«V . , Э.Мэ f.
и; ,
45 l. i,. 0, -dib IE,
откуда следуют равенства (l) и (2) Путем постановки двухфакторного эксперимента на трех уровнях по каж- 50 дои из переменных об, М могут быть определены коэффициенты а, Ъ; при различных базовых значениях о( оС, , т.е. при целых базовых значениях «( и М.
Дробные части ., 5f поступают непосредственно в функциональные преобразователи 8. В результате схема формирования оптимальных значений
токов 1д, i обмотки якоря, образованная постоянтш запоминающим устройством 7, функциональными преоб- рАзователями 8, задатчиком 9 момента и разделителями 10 и 1 сигналов, имеет свойства безынерционного аналогового прзобразователя, С другой стороны, перестройка управляемых фунциональных преобразователей 8 коэф- фйциентами а,, Ъ, хранящимися в по- cfoHHHOM запоминающем устройстве 7, пбзволяет скомпенсироват конструктивное несовершенство электромашин- нбй иасти моментного вентильного эле т| опривода и устра шть пульсации и нелинейность электромагнитного мо ,,, связанные с явнополюсностъю
тель с двухфазной обмоткой якоря, ротор-индуктор которого механически связан с датчиком положения ротора, два усилителя мощности, два датчика тока, каждьй из которых включен в обратную ;СВязь соответствующего усилителя мощности,, выходы усилителей мощности подключены к обмотке якоря синхронного электродвигателя, постоянное запоминающее устройство, два функциональных преобразователя, входы которых связаны с выходами постоянного запоминающего устройства, а выходы - с входами соответствующих усилителей г-ющностИэ о.;гличающий ся тем, что, с целью повышения энергетических показателей и точности стабилизации момента, введены задатчик моемым и реализующим функцию
Т
41 in
x;(5t ,М)-f{. (dC,M) 5 причем выходы
рЬтора, зубчатостью статора, несину сЬидальностно кривых магнитной.индук- 20 мента, два разделителя сигнал а на ц|1и ротора и ЩС обмотки якоря, с на- дробную и целую части, а функциональ- с| 1щенйем магнитопровода и ТоД,иый преобразователь выполнен управля Таким образому использование пред- л1агйемого изобретения позволяет полу чйть высокостабютьный электромагнит- 25 ный момент.с компенсацией всех основ ньгх дестабилизирующих факторов при возможности индивидуальной настройки и минимальных потерях в обмотке яко- р|Я,.30
Высокая стабильность момента по углу поворота ротора и линейность момента по входному сигналу позволяют повысить гшавность хода и точность прецизионных электромека1-.ичес1шх сие- g тем с исполнительными моментнымк электродвигателями 6 Сниженрю мощности потерь в обмотке якоря повышает Надежность электродвигателя в связи со снижением температуры обмотки и 40 облегчением режима силовьк элементов усилителей мощности.
датчика положения ротора и задатчика
момента подключены соответственно к разделителям сигнала на дробную и целую части, выходы целой части которых подключены к входу постоянного запоминающего устройства, а выходы дробной указанных разделителтей сигнала - к входам функциональных преобразователей .соответственно, где i - оптимальное значение тока в
:.-й фазе обмотки якоря; л{ - коэффицкенты,аппроксимации фушщии 1 f(,M) ;
(dL-jM) - координатньте функции
аппроксимации; с(. - 7/гол поворота ротора; К - задаваемый электромагнитный момент
Формула изобретения
Моментный вентильный электроприводр содержащий синхронньш электродаигатель с двухфазной обмоткой якоря, ротор-индуктор которого механически связан с датчиком положения ротора, два усилителя мощности, два датчика тока, каждьй из которых включен в обратную ;СВязь соответствующего усилителя мощности,, выходы усилителей мощности подключены к обмотке якоря синхронного электродвигателя, постоянное запоминающее устройство, два функциональных преобразователя, входы которых связаны с выходами постоянного запоминающего устройства, а выходы - с входами соответствующих усилителей г-ющностИэ о.;гличающий ся тем, что, с целью повышения энергетических показателей и точности стабилизации момента, введены задатчик мо мента, два разделителя сигнал а на дробную и целую части, а функциональ- иый преобразователь выполнен управляемым и реализующим функцию
Т
мента, два разделителя сигнал а н дробную и целую части, а функцио иый преобразователь выполнен упр
41 in
x;(5t ,М)-f{. (dC,M) 5 причем выходы
датчика положения ротора и задатчика
момента подключены соответственно к разделителям сигнала на дробную и целую части, выходы целой части которых подключены к входу постоянного запоминающего устройства, а выходы дробной указанных разделителтей сигнала - к входам функциональных преобразователей .соответственно, где i - оптимальное значение тока в
:.-й фазе обмотки якоря; л{ - коэффицкенты,аппроксимации фушщии 1 f(,M) ;
(dL-jM) - координатньте функции
аппроксимации; с(. - 7/гол поворота ротора; К - задаваемый электромагнитный момент
J;M,
t lUfilS i J
М - цель5е и дробные части параметров dt я М соответственно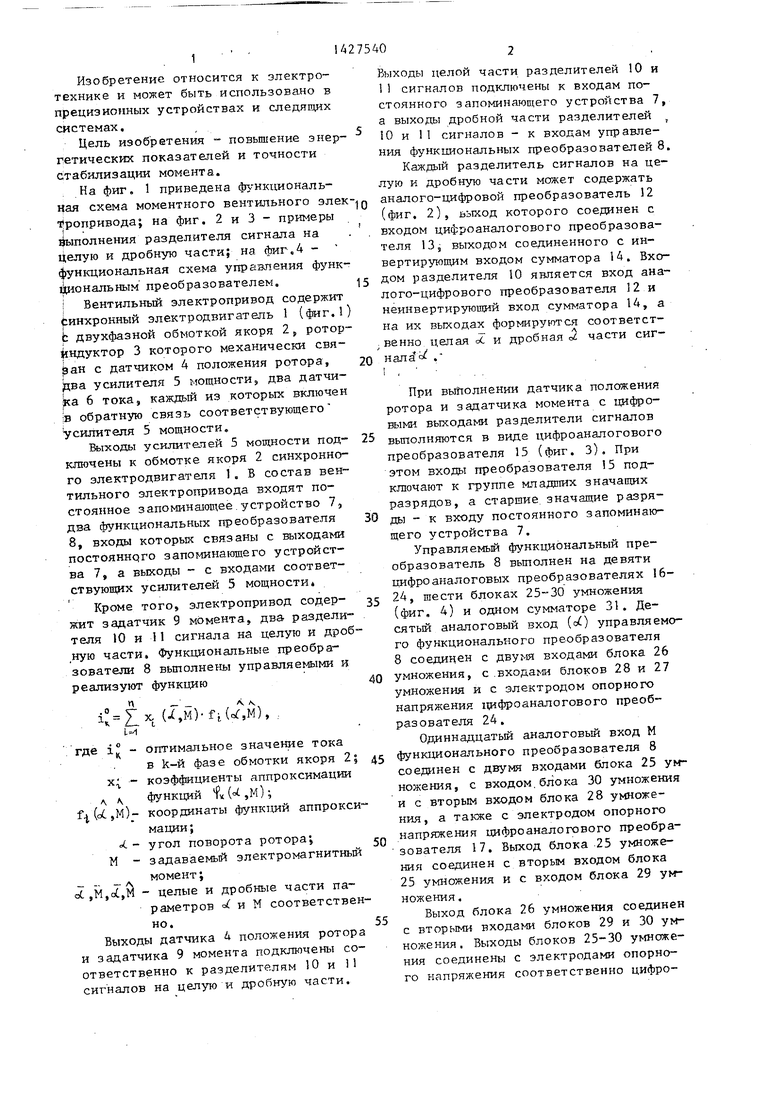

| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1988 |
|
SU1751836A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751837A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1363413A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |


Изобретение относится к электротехнике и может быть использовано в прецизионных устройствах и следящих системах. Целью изобретения 5 вляет- ся повьппение энергетических показа- . тепей. В моментньй вентильный электродвигатель введены задатчи 9 момента, два разделителя 10, 11 сигнала иа целую и дробную части. Функционалй- ные преобразователи 8 вьшолнены управляемыми, реализующикм функцию i ,(/,M) fi(), где i - оптиi мальное значение тока в одной из фаз обмотки якоря 2; х - коэффициент - проксимации функции Уц(с(,М); fj (о,М)- координаты функции аппроксимации; - угол поворота ротора синхронного двигателя 1; М - зgдaвaejмый электромагнитный момент, f М целые и дробные части ot и М. На валу ротора 3 установлен датчик 4 положения ротора. Входы функциональных преобразователей 8 соединены.с выходами постоянного запоминающего устройства 7, а выходы - с входами усилителей 5 мощности. Выходы датчика 4 и задатчика 9 подключены к разделителям 10, П. Выходы целой части разделителей 10, II соединены с входами устройства 7, а выходы дробной час- ;ти - к входам управления функциональ- ;ных преобразователей 8. Обмотка яко- ря 2 синхронного двигателя подключена к выходу усилителей мощности 5. В электроприводе обеспечиваются высокостабильный электромагнитный момент с компенсацией всех основных дестабилизирующих факторов, возможность индивидуальной настройки и fi нимaльныe потери. 4 ил. с Л (Л 4 N СП 4
-
lc/
Фиг. 2
.Фиг.З
ФагЛ
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1363413A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
