второй вход присоединен к выходу пятого регистра, первый вход третье го блока у тожения подключен к выходу второго блока умножения, второй вход - к выходу первого регистра а выход - к входу второго нитег ратора, выход четвертого сумматора соединен с первыми входами четвертого и пятого блоков умножения, вторые входа четвертого и пятого блоков умножения подключены к вькодам соответственно второго и третье 74 го регистров, выход четвертого блока умножения соединен с вторым входом третьего сумматора, выход пятого блока умножения подключен к входу третьего интегратора, выход которого соединен с вторым входом второго сумматора, входом блока формирования сигнала самонастройки является вход анализатора знака, выходом - выход четвертого регистра, вход которого соединен с выходом анализатора знака.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| Адаптивная система с эталонной моделью для управления летательным аппаратом | 2016 |
|
RU2647405C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1290255A1 |
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА .УПРАВЛЕНИЯ, содержащая последовательно соединенные эадатчик, первый сумматор, регулятор, состоявший из последовательно соединенных неизменяемой и изменяемой частей, усилитель мощности, электродвигатель с установленньо4и на нен датчиком регулируемой координаты и датчиком тока, последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор и второй блок умножения, второй вход которого подключен к выходу второго сумматора, первый вхбд которого соединен с выходом датчика тока, блок деления. ВСЕСОЮЗЯДЯ «ч BAT Jli«0- л ТЕХйЯЧеСКАЯ БИБЛИОТЕКА второй интегратор , выход которого подключен к управляющему входу изменяемой части регулятора, первому входу блока деления и второму входу первого блока умножения, выход датчика регулируемой координаты соединен с вторьми входами первого и четвертого сумматоров, последовательно соединенные эталонную модель, блок масштабных коэффицнентов и блок формирования сигнала самонастройки, выход которого соединен с третьим входом первого сумматора, вход эталонной модели подключен к выходу задатчика, а ее второй выход - к второму входу блока масштабных коэффициентов, третий и четвертый входы которого соединены соответственно с выходом датчика регулируемой координаты и выходом третьего сумматора, а также третий интегратор, отличающаяся тем, что, с целью повыше ния точности и расширения диапазона допустимых изменений параметров СП системы, она содержит третнй, чет00 QD 4 вертый и пятый блоки умножения, первыЛ, второй, третий, четвертый и пятыА регистры, анализатор знака, широтно-импульсный преобразователь и цифроаналоговый преобразователь, выход которого является выходом изменяемой части регулятора, цифровой вход является сигнальным входом изменяемой части регулятора, а вывод питания подключен к выходу ши- , ротно-импульсного преобразователя, ЦИФРОВОЙ вход которого соединен с выходом блока деления, первый вход которого является управляющим входом изменяемой. части регулятора, а
1
Изобретение относится к автома-- тическому управлению и может быть использовано для aдaпtивнoгo управле ния электроприводами нестационарных объектов с неупругой сиязью двигателя и механизма в станкостроении, металлургии, в системах автоматического управления рабочими органами роботов, в электромеханических системах при высоких требованиях к стабильности их динамических свойств в условиях изменения параметров этих систем во времени.
Цель изобретения - повьшение точности самонастраивающейся системы уп равления и расширение диапазона допутимых изменений ее параметров.
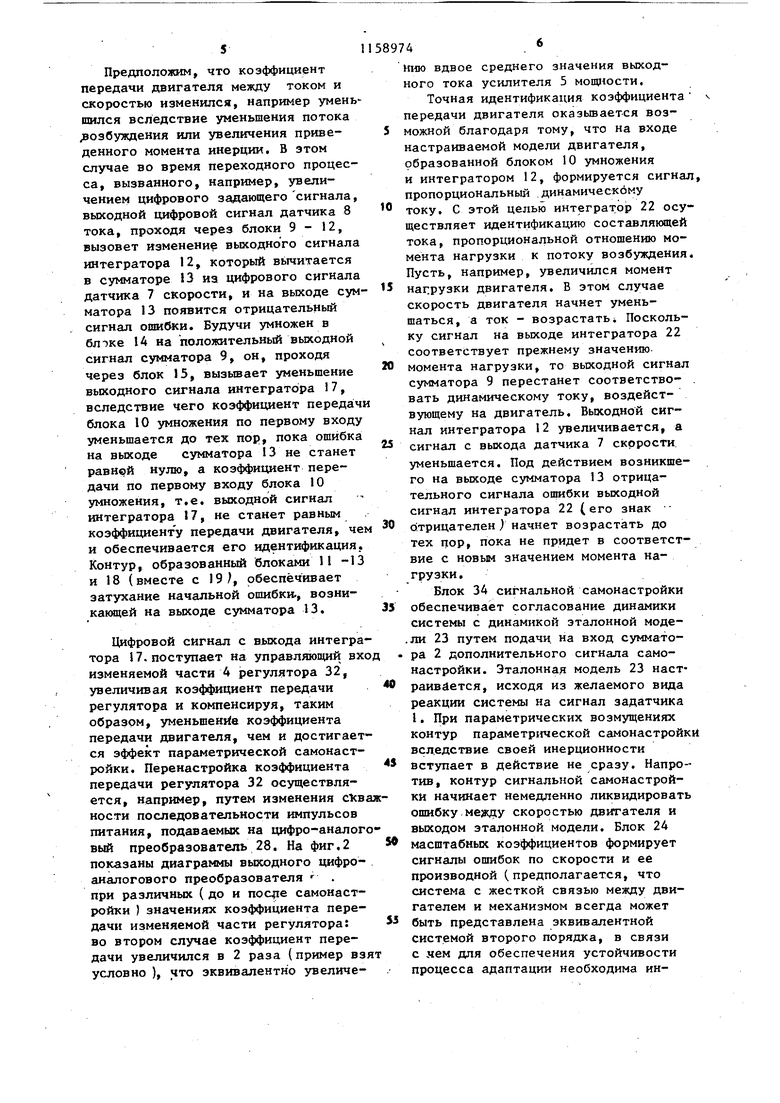
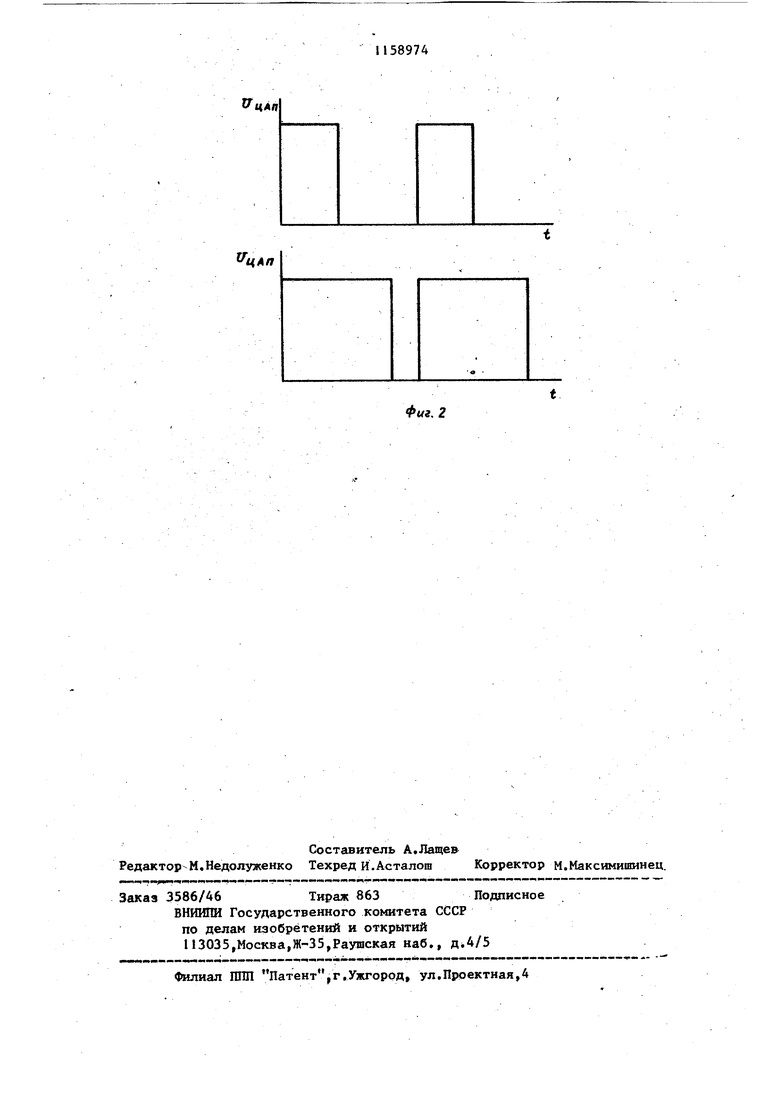
На фиг.1 изображена структурная схема предлагаемой самонастраивающейся системы управления; на фиг,2 диаграммы, иллюстрирующие изменение коэффициента передачи изменяемой части регулятора.
Система содержит задатчик 1, первый сумматор 2, неизменяемую часть регулятора 3, изменяемую часть регулятора 4, усилитель 5 мощности, электродвигатель 6, аналого-цифровой датчик 7 регулируемой координаты, аналого-цифровой датчик 8 тока, второй 9 сумматор, первый блок iO умножения, третий сумматор П, первый интегратор 12, четвертый сумматор 13, второй блок умножения 14, третий блок 15 умножения, первый регистр 16, второй интегратор 17, четвертый блок 18
умножения, второй регистр 1У пятый блок 20 умножения« третий регистр 21, третий интегратор 22, эталонную Модель 23, блок 24 масштабных коэффициентов, блок 25 формирования сйгнала самонастройки, состоящий из анализатора 26 знака и четвертого регистра 27, причем изменяемая часть 4 регулятора состоит из цифроаналогового преобразователя 28, ши ротно-импульсного преобразователя 29, блока 30 деления и пятого регистра 31.
Основной контур регулирования (скорости двигателя ) образован задатчиком 1, первым с мматором 2, неизменяемой частью регулятора 3, изменяемой частью регулятора 4, усилителем мощности 5 и электродвигателем 6 с аналого-цифровым . датчиком регулируемой координаты 7, например датчиком скорбсти. Вло ки 3 и 4, включая блоки 28-31, об разуют регулятор 32.
Блоки 9-22 образуют устройство 33 идентификации коэффициента передачи ток - скорость двигателя. В устройстве индентификации интегратор 22 совместно с блоками 20 и 2.1 осуществляет.формирование сигнала, пропорционального току нагрузки (т.е. отношению момента нагрузки к потоку возбуждения двигателя ,
Блок 10 умножения и интегратор 12, соединенные последовательно через. сумматор 11, образуют настраиваемую модель двигателя. Поскольку на вход сумматора 9 подаются как сигна
пропорциональный току двигателя, снимаемый с датчика тока 8, так и сигнал, пропорциональный току нагрузки, то на вход настраиваемой модели поступает та же величина, что и j реально действующая на входе двигателя (динамический ток). Это позволяет использовать получаемый на выходе сумматора 13 сигнал ошибки для настройки коэффициента передачи мо- 0 дели (так как эта ошибка обусловлена только различием коэффициентов передачи двигателя и модели.) и, еле до ательно, для идентификации коэффициента передачи двигателя 6. tj Оценка коэффициента передачи двигателя, вырабатываемая интегратором 17, подается иа управляющий вход изменяемой части 4 регулятора 32, настраивая его коэффициент передачи (парамет- Ю рическая самонастройка ). .
Блоки 23-25t образующие блок 34 сигнальной самонастройки, обеспечивают сигнальную самонастройку системы.25
Блоки 5 и 6 - аналоговые, блоки 7 и 8 - аналого-цифровые, блоки 28 и 29 - цифро- аналоговые, остальные блоки 1-3, 9-27, 30 и 31 выполнены в цифровом виде. Регйст- 30 ры весовых коэффициентов Р1-РЗ,Р5 в сочетании с соответствующими блоками умножения и деления, а также регистр. Р4 позволяют задавать параметры системь (алгоритма управле-35 ния )путем занесения в эти регистjM)i соответств чощих кодосигналов.
Блок 24 масштабных коэффициентов может быть реализован, например, с 40 помощью пятого сумматора, первый и второй входы которого являются соответственно первьм и третьим входами блока масштабных коэффициентов, шестого сумматора, nepBbtfi и второй 4$ „входы которого являются соответственно вторым и четвертым входами блока масштабных коэффициентов седьмого сумматора, выход которого служит выходом блока масштабных коэф- W фициентов, последовательно соединенных шестого регистра и шестого блока умножения и последовательно соединенных седьмого регистра и седьмого блока умножения, причем вторые . 5 входы указанньк блоков умножения подключены к выходам соответственно пятого и шестого.сумматоров, а вы-.
ходы - соответственно к первому и второму входам седыюго сумматора. Цифровая часть самонастраивающейся системы управления может быть выполнена на цифровых интегральных микросхемах серий 1802, 1804, 133,530, 533, 572. Например, эталоннаяЛюдель 23 может быть реализована в виде цифрового фильтр на интегральных микросхемах 133 серии (133ИП4,133ТМ5,133ТМ7,133ИМЗ/; интеграторы 12, 17 и 22 - на микросхемах 133ИП4, 133ТМ5; сумматоры 2, ,9,11 и 13 - на микросхемах 133ИП4, 133ШЗ; регистры 16,19,21,27 и 31 - на микросхемах 133ТМ5, 133ТМ блоки умножения 10,14,15,18 и 20 и блок деления 30 - на арифметическом расширителе (умножнтеле) серии 1802 на микропроцессоре 1804ВС1; неизменяемая часть регулятора 3 может быть реализована как цифровой Пу ПИ- или ПИД-регулятор на элементах серий 1802,1804, 133 и др.
Работа самонастраивающейся системы управления,например скоростью вращения электродвигателя с переменным приведенным моментом инерции и регулируемым потоком возбуждения, происходит след5тощим образом.
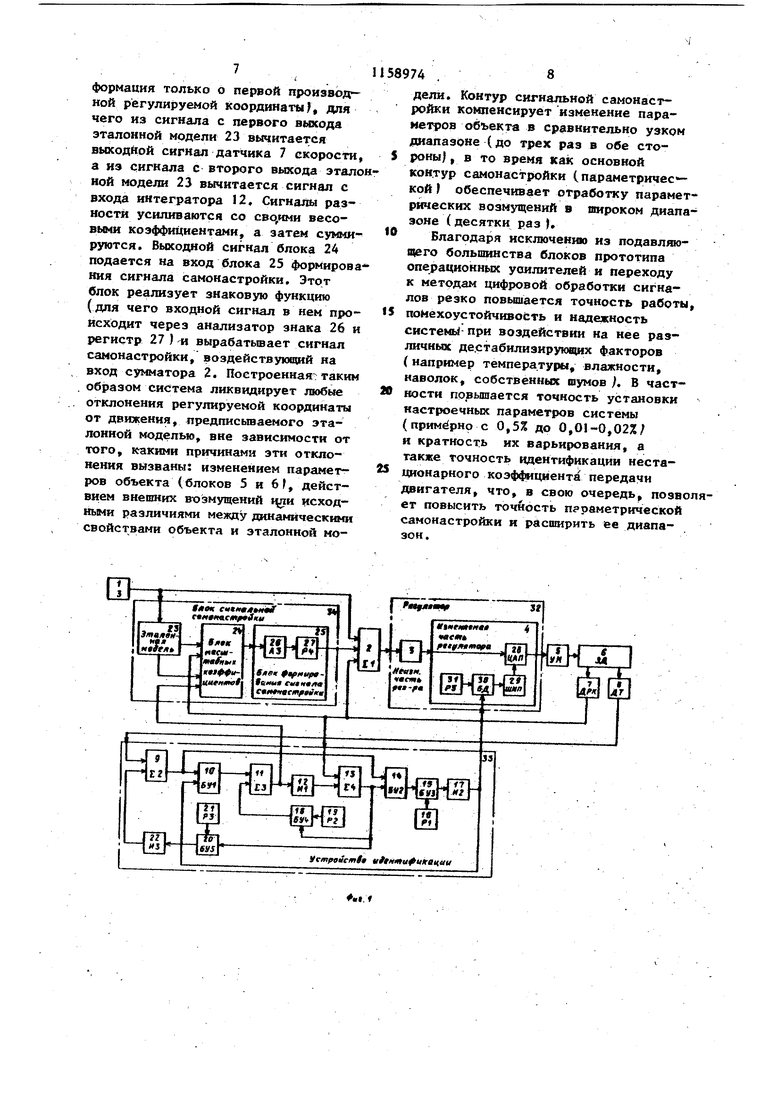
Задатчик I вырабатывает последовательность цифровых выборок задающего аналогового сигнала, именуемую в дальнейшем для кратности цифровыми задающим сигналом. Этот сигнал через сумматор 2 и неизменяемую часть регу лятора 3 поступает на цифро-аналоговый преобразователь 28 и после преобразования в аналоговую ве.пичину передается через усилитель мощнасти 5 на электродвигатель 6, который благодаря совместному действию регулятора 32 и отрицательной обратной связи с выхода датчика 7 скорости на вход сумматора 2 развивает скорость вращения, соответствующую данному задающему сигналу. Настроечные параметры регулятора 32. выбраны таким образом, что при номинальном приведенном моменте инерции двигателя и номинальном потоке возбуждения динамичё :кие свойства системы (быстродействие и динамические ошибки по управлению и возмущению J удовлетворяют техническим требованиям и считают-ся оптимальньми. Предположим, что коэффициент передачи двигателя между током и скоростью изменился, например умень шился вследствие уменьшения потока ;возбуждения или увеличения приведенного момента инерции, В этом случае во время переходного процесса, вызванного, например, увеличением цифрового задающего сигнала, выходной цифровой сигнал датчика 8 тока, проходя через блоки 9 - 12, вызовет изменение выходного сигнала интегратора 12, который вьтитается в сумматоре 13 из цифрового сигнала датчика 7 скорости, и на выходе сум матора 13 появится отрицательный сигнал ошибки. Будучи умножен в блоке 1А на положительный выходной сигнал сумматора 9, он, проходя через блок 15, вызьшает уменьшение выходного сигнала интегратора 17, вследствие чего коэффициент переда:ч блока 10 умножения по первому входу уменьшается до тех пор, пока ошибка на выходе сумматора 13 не станет равней нулю, а коэффициент передачи по первому входу блока 10 умножения, т.е. выходной сигнал интегратора 17, не станет равным коэффициенту передачи двигателя, че и обеспечивается его идент1к1 икация. Контур, образованный блоками И -13 и 18 (вместе с 19), обеспечивает затухание начальной ошибки., возникающей на выходе сумматора 13. Цифровой сигнал с выхода интегра тора 17. поступает на управляющий вх изменяемой части 4 регулятора 32, увеличивая коэффициент передачи регулятора и компенсируя, таким образом, уменьшение коэффициента передачи двигателя, чем и достигает ся эффект параметрической самонастройки. Перенастройка коэффициента передачи регулятора 32 осуществляется, например, путем изменения стсв ности последовательности импульсов питания, подаваемых на цифро-аналог вый преобразователь 28. На фиг.2 показаны диаграммы выходного цифроаналогового преобразователя . при различных ( до и посре самонастройки ) значениях коэффициента передачи изменяемой части регулятора: во втором случае коэффициент передачи увеличился в 2 раза (пример вз условно ), что эквивалентно увеличеИию вдвое среднего значения выходного тока усилителя 5 мощности. Точная идентификация коэффициента передачи двигателя оказывается возможной благодаря тому, что на входе настраиваемой модели двигателя, образованной блоком 10 умножения и интегратором 12, формируется сигнал, пропорциональный динамическому току, С этой целью интегратор 22 осуществляет идентификацию составляющей тока, пропорциональной отношению момента нагрузки к потоку возбуждения. Пусть, например, увеличился момент наг рузки двигателя. В этом случае скорость двигателя начнет уменьшаться, а ток - возрастать Поскольку сигнал на выходе интегратора 22 соответствует прежнему значению, момента нагрузки, то выходной сигнал сумматора 9 перестанет соответство- . вать динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 12 увеличивается, а сигнал с выхода датчика 7 скорости уменьшается. Под действием возникшего на выходе сумматора 13 отрицательного сигнала ощибки выходной сигнал интегратора 22 (его знак отрицателен I начнет возрастать до тех пор, пока не придет в соответствие с новым значением момента нагрузки. Блок 34 сигнальной самонастройки обеспечивает согласование динамики системы с динамикой эталонной модели 23 путем подачи, на вход сумматора 2 дополнительного сигнала самонастройки. Эталонная модель 23 настраивается, исходя из желаемого вида реакции системы на сигнал задатчика I, При параметрических возмущениях контур параметрической самонастройки вследствие своей инерционности вступает в действие не сразу. Напротив, контур сигнальной самонастройки начинает немедленно ликвидировать ошибку между скоростью двигателя и выходом эталонной модели. Блок 24 масштабных кoэффициeнtoв формирует сигналы ошибок по скорости и ее производной (.предполагается, что система с жесткой связью между двигателем и механизмом всегда может быть представлена эквивалентной системой второго порядка, в связи с яем для обеспечения устойчивости процесса адаптации необходима информация только о первой производ-кой регулируемой координаты f, для чего из сигнала с первого выхода эталонной модели 23 вычитается выходной сигнал датчика 7 скорости, а из сигнала с второго выхода эталоной модели 23 вычитается сигнал с входа интегратора 12, Сигналы разности усиливаются со сво,нми весовыми коэффициентами, а затем суммируются. Выходной сигнал блока 24 подается на вход блока 25 форМирования сигнала самонастройки. Этот блок реализует знаковую функцию (для чего входной сигнал в нем происходит через анализатор знака 26 и регистр 27 ) И вырабатьшает сигнал самонастройки воздействующий на вход сумматора 2. Построенная: таким образом система ликвидирует любые отклонения регулируемой координаты от движения, предписьгааемого эталонной моделью, вне зависимости от того, какими причинами эти отклонения вызваны: изменением параметров объекта (блоков 5 и 6, действием внешних возмущений исходными различиями между динамическими свойствами объекта и эталониой модели. Контур сигнальной самонастройки компенсирует изменение параметров объекта в сравнительно узком диапазоне (до трех раз в обе стороны/, в то время как основной контур сгмонастр эйки (параметрической обеспечивает отработку параметрических возмущений в широком диапазоне (десятки раз },
благодаря исключению из подавляющего большинства блоков прототипа операционн(1Х усилителей и переходу к методам цифровой обработки сигналов резко повышается точность работы помехоустойчивость и надежность системь( при воздействии на нее различных де.стабнлизируюащх факторов (например температуры, влажности, наволок, собственных шумов ). В частности повышается точность установки настроечных параметров системы (примерно с 0,5% до 0,01-0,02%/ и кратность их варьирования, а также точность идентификации нестационарного коэффициента передачи двигателя, что, в свою очередь, позвоет повысить точйость параметрической самонастройки и расширить ее диапазон.
Фиг. 2
| Самонастраивающаяся система регулирования скорости | 1974 |
|
SU585475A1 |
| Мысливец Н.Л.,Сабинин Ю.А | |||
| Самонастраивающийся электропривод промьшшенного робота, построенный на базе системы подчиненного регулирования | |||
| Электротехническая промышленность | |||
| Сер.Электропривод, 1977, № 8 | |||
