1
Изобретение относится к электротехнике и может быть применено в горной промышленности при создании мощных электромагнитных машин ударного действия, карьерного электромагнитного транспорта, в строительной технике при забивании свай, разработке мерзлых грунтов и т.д.
Известно устройство для управления многокаскадной электромагнитной маши-)о ной возвратно-поступательного дзижения, содержащее датчики положения и электромагниты, установленные на направляющей трубе, в которой расположен подвижный ферромагнитный якорь, is Коммутация движения якоря в различных направлениях осуществляется с помощью триггеров Cl .
Недостатком данного устройства является его сложность большого о количества входящих в него узлов, трудность согласования их во время работы и, как следствие, недостаточ- , ная надежность в работе.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является устройство для управления электромагнитной машиной возвратно-поступательного движения, снабженной п силовыми электромагнитами, установленными на направляющей трубе с расположенным в ней ферромагнитным якорем, содержащее силовые тиристоры и диоды, подключающие обмотку каждого электромагнита к питающему выпрямителю, коммутирующие конденсаторы, трансформатор и индукционные концевые и промежуточные датчики положения, связанные через диоды с цепями управления тиристоров, каждая из которых включает в себя конденсатор, тиристор и диоды С2.
,-,-;
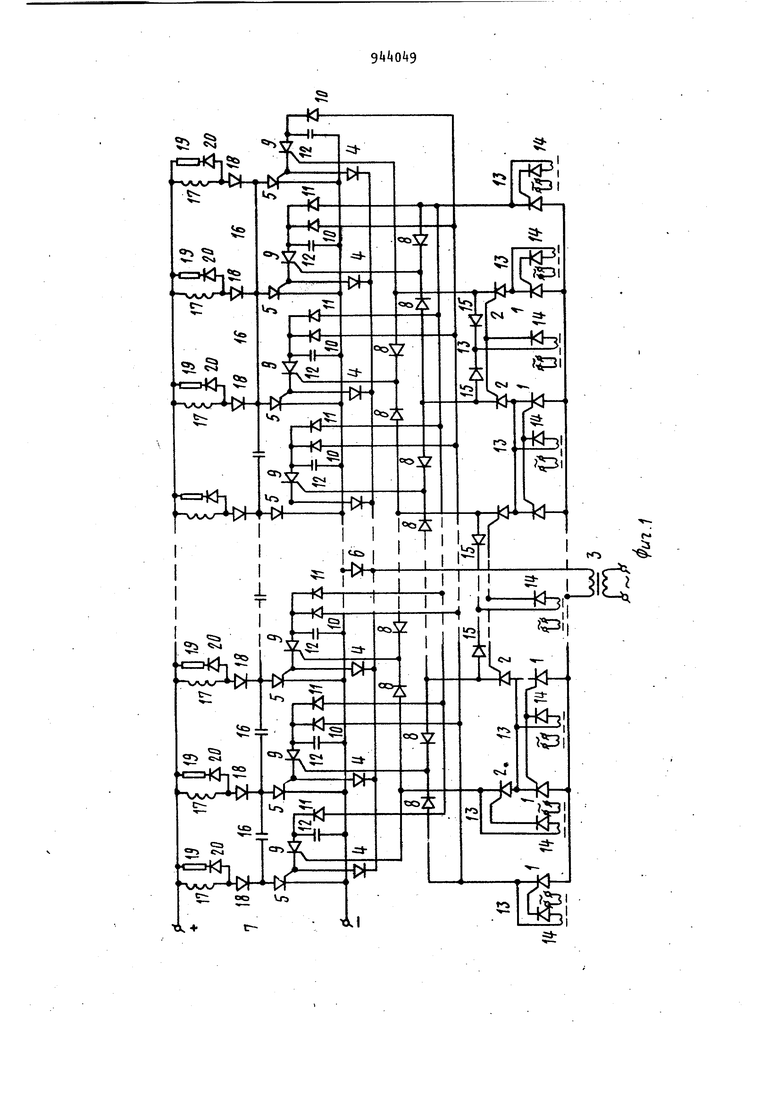
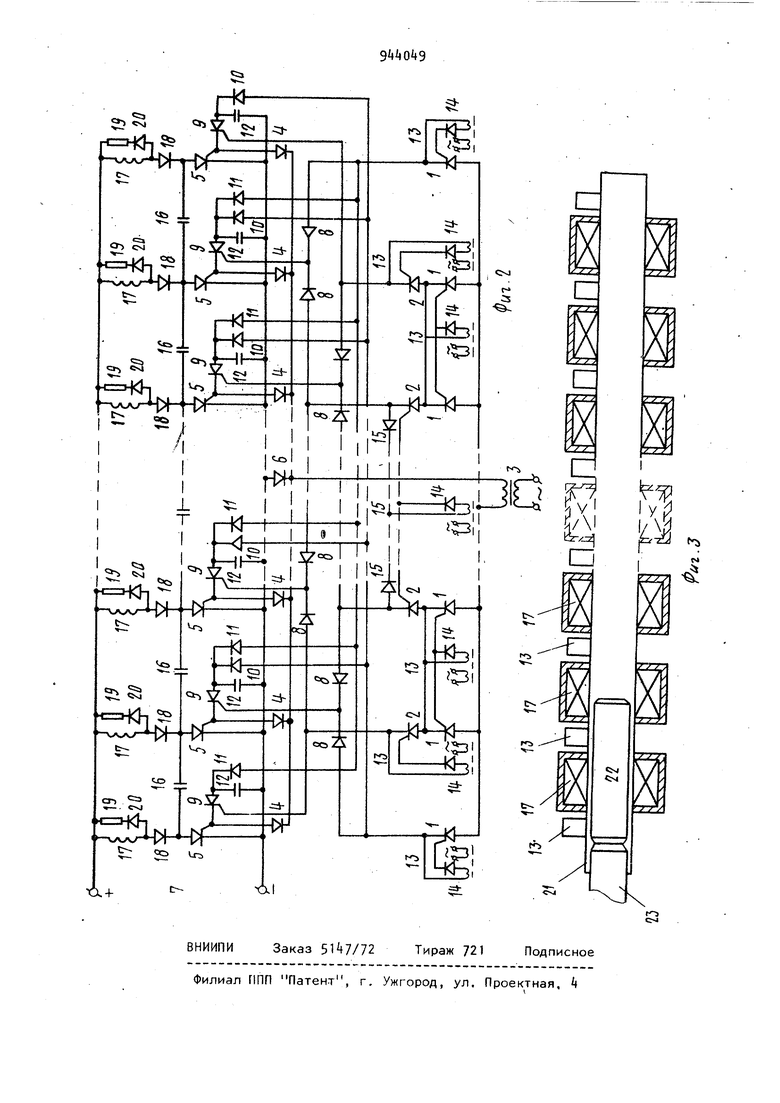
К недостаткам данного устройства следует отнести большое число (2п-2) датчиков положения, находящихся на направляющей трубе, которая во время работы мдшины подвергается ударным 3 g и вибрационным нагрузкам. Это сни кает надежность работы устройства. Цель изобретения - повышение надежности работы устройства. Указанная цель достигается тем, НТО в известном устройстве для управ ления электромагнитной машиной возвратно поступательного движения цепь управления каждого из двух концевых электромагнитов содержит один дополнительный тиристор, а каждого из промежуточных - два последовательно включенных тиристора, соединяющих уп равляющие электроды основных тиристо ров цепей управления через диоды с одним выводом вторичной обмотки тран форматора, подключенной вторым своим выводом через диодщ к управляющим Электродам силовых тиристоров и отрицательному полюсу питающего выпрямителя, два концевых датчика подключены к управляющим электродам дополнительных тиристоров, соединенных катодами через диоды с управляющими электродами основных тиристоров цепей управления второго и (n-l)-ro электромагнитов, а (п-1) промежуточных датчиков подключены к управляющим электродам дополнительных тиристоров цепей управления двух смежных электромагнитов, а катод Одного из этих последовательно соединенных тиристоров каждой (п-1) пары подключен через диоды к управляющим электродам основных тиристоров цепей управления предыдущего и последующего электромагнитов, взятых через один. Такое подключение датчиков положения к цепям управления тиристоров, находящихся во введенных п электрических цепях управления и подключение самих п электрических цепей позволяет уменьшить числЬ датчиков положения, находящихся на направляющей трубе и подвергающихся как вибрационной, так и ударной нагрузкам при работающей машине, с (2п-2) до (), где п - число силовых электромагнитов, кроме того, позволяет уменьшить число трансформаторов, использовав только один трансформатор, имеющий всего лишь одну вторичную обмотку. Это позволяет повысить надежность работы предлагаемого устрой ства. На фиг. 1 показана принципиальная электрическая схема предлагаемого устройства для нечетного числа силс#gвых электромагнитов (п - нечетное число); на фиг. 2 - то же, для четного числа силовых электромагнитов (п - четное число); на фиг. 3 электромагнитная машина возвратнопоступательного движения, схема. Устройство для управления электромагнитной машиной возвратно-постуг пательного движения (фиг. 1 и 2) состоит из п каналов, каждый из которых включает тиристоры 1 и 2, подключенные к одному из выводов вторичной обмотки трансформатора 3. Второй вывод этой обмотки трансформатора через диоды k подключен к управляющим электродам силовых тиристоров 5, а через диод 6 - к отрицательному полюсу питающего выпрямителя 7 (не показан). Катоды тиристоров 1 и.2 через диоды 8 подключены к управляющим электродам тиристоров 9, установленных в цепи управления силовых тиристоров 5. В цепи управления силовыми тиристорами 5 установлены также диоды 10 и 11 и конденсаторы 12. Вторичные обмотки индукционных датчиков положения 13 через диоды It подключены к тиристорам 1 и 2. Первичные обмотки датчиков положения 13 подключены к сети переменного тока. Диоды 15 связывают катоды тиристоров 2 промежуточных каналов. К анодам силовых тиристоров 5 подключены коммутирующие конденсаторы 16. Обмотки силовых электромагнитов 1 (фиг. 1, 2 и 3) соединены последовательно с диодами 18 и с силовыми тиристорами 5 и подключены к питающему выпрямителю 7. Параллельно обмоткам силовых электромагнитов 17 подключены цепи глшения энергии магнитного поля, состоя1чие из последовательно соединенных резистора 19 и диода 20. В направляющей трубе 2Г( фиг, 3), на которой установлены обмотки силовых электромагнитов 17, расположен ферромагнитный якорь 22. Якорь 22 в конце рабочего хода может наносить, например, удар по рабочему инструменту 23. В работе по перемещению ферромагнитного якоря 22 из крайнего левого положения в крайнее правое (обратный ход ) или из крайнего правого положения в крайнее левое (прямой ход) участвуют (п-1) силовых электромагнитов, начиная со второго - при обратном ходе и с первого - при прямом ходе ферромагнитного якоря 22. Таким образом, п-ый электромагнит участвует 8 работе по перемещению ферромагнитного якоря 22 только при его обратном ходе, а первый только при пря мом ходе. Промежуточные электромагниты 17 перемещают ферромагнитный якорь 22 как в одном, так и в другом направлениях. Устройство работает следующим образом. Пусть, например, ферромагнитный якорь 22 находится в левом крайнем положении {фиг. 3). При этом он замыкает магнитопроводы датчиков положения 13 первого и второго каналов. Сигнал управления, снимаемый со вторичной обмотки датчика положения 13 (фиг. 1 и 2) через диод Ц подается в цепь управления тиристора 1 первог канала. Последний отпирается и продолжает находиться в этом состоянии до тех пор, пока ферромагнитный якорь 22 замыкает магнитопровод первого датчика положения 13. За это время конденсаторы 11 остальных каналов, через диоды 10 заряжаются до амплитудного напряжения вторичной об мотки трансформатора 3. Одновременно сигнал управления, снимаемый со вторичной обмотки трансформатора 3, через открытый тиристор 1 первого канала и диод 8 подается в цепь управления тиристора 9 второго канала. Последний отпирается и. разряжает кон денсатор 11 через цепь управления си гового тиристора 5, отпирая его. При этом обмотка силового электромагнита 17 второго канала подключается к питающему выпрямителю 7- Происходит перезаряд коммутирующих конденсаторов 16 первого и второго каналов. Ферромагнитный якорь 22 начинает втягиваться силовым электромагнитом 17 второго канала. По мере втягивания ферромагнитного якоря 22 его передняя часть выходит из силового электромагнита 17 второго канала и замыкает магнитопровод третьего датчика положения 13. С момента замыкания магнитопровода третьего датчика положения 13 отпираются оба тиристора 1 и 2 третьего канала, что приводит к отпиранию соответствующего тиристора 5 и включению третьего элект ромагнита. Последний втягивает якорь 22. Далее процесс протекает аналогично. При достижении ферромагнитным яко рем 22 крайнего правого положения (фиг. 3) ОН замыкает магнитопровод (п+1) датчика положения 13. При этом в устройстве возникает состояние, аналогичное тому, которое было при замыкании ферромагнитным якорем 22 магнитопровода первого датчика положения 13. После этого ферромагнитный якорь 22 наминает двигаться в обратном направлении. Параллельно обмоткам силовых электромагнитов 17 подключены цепи гашения энергии магнитного поля, состоящие из последовательно соединенных резистора 19 и диода 20, включенных в непроводящем направлении по отношению к питающему напряжению выпрямителя 7. Разрядные цепи предотвращают торможение ферромагнитного якоря 22 отключаемым электромагнитом. Диоды 18 препятствуют разряду коммутирующих конденсаторов 16 и одновременно служат для гашения колебательных процессов. Введение в устройство для управления электромагнитной машиной возвратно-поступательного движения электрических цепей, каждая из которых, за исключением первой и п-ой, имеет по два последовательно соединенных тиристора, а первая и п-ая - по одному тиристору, диодов, служащих для развязки различных электривеских цепей, а также соответствующее выполнение связей между функциональными элемен-тамй привело к уменьшению датчиков положения. Формула изобретения Устройство ;ля управления электромагнитной машиной возвратно-поступательного движения, снабженной п силовыми электромагнитами, установленными на направляющей трубе с расположенным в ней ферромагнитным якорем, содержащее силовые тиристоры и диоды, подключающие обмотку каждого электромагнита к питающему выпрямителю, коммутирующие конденсаторы, трансформатор и индукционные концевые и промежуточные датчики положения, связанные через диоды с цепями управления тиристоров,каждая из которых включает в.себя конденсатор, тиристор и диоды, отличающееся тем, что, с целью повы шения надежности, цепь управления каждого из двух концевых электромаг нитов содержит один дополнительный
тиристор, а каждого из промежуточных два последовательно включенных тиристора, соединяющих управляющие электроды основных тиристоров цепей управления через диоды с одним выводом вторичной обмотки трансформатора, подключенной вторым своим выводом через диоды к управляющим электродам силовых тиристоров и отрицательному полюсу питающего выпрямителя, два концевых датчика подключены к управляющим электродам дополнительных тиристоров, соединенных катодами через диоды с управляющими электродами основных тиристоров цепей управления второго и (n-l)-ro электромагнитов, снабжены еще одним дополнительным тиристором, соединенным управляющими электродами с двумя концевыми датчиками, а катодами через диоды - с управляющими электродами основных тиристоров цепей управления, (п-1) промежуточных датчиков положения подключены к управляющим электродам дополнительных тиристоров цепей управления двух смежных электромагнитов, а катод одного из этих последовательно соединенных тиристоров каждый из (п-2)-х пар подключен через диоды к управляющим элекродам основных тиристоров цепей управления предыдущего и последующего электромагнитов, взятых через один.
Источники информации, принятые во внимание при экспертизе
1.Сбоев В,И., Ласков Н.Н. Система управления четырехсекционной электромагнитной машиной возвратно-поступательного движения. - Материалы Всесоюзного совещания по проблеме Силовые импульсные системы, ч. 1, Электрические силовые импульсные системы, Новосибирск, 19б9, с.ВЭ-Э.
2.Авторское свидетельство СССР № , кл. Н 02 Р 7/62, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1975 |
|
SU743154A1 |
| Устройство для управления грузоподъемным электромагнитом | 1990 |
|
SU1817144A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1982 |
|
SU1053256A1 |
| Устройство для включения тиристоров | 1983 |
|
SU1115174A1 |
| Устройство для управления грузоподъемным электромагнитом | 1989 |
|
SU1654885A1 |
| Устройство для контроля положения механизма | 1976 |
|
SU602973A1 |
| Устройство для управления электромагнитным двигателем возвратно-поступательного движения | 1982 |
|
SU1136293A1 |
| Устройство для управления грузоподъемным электромагнитом | 1984 |
|
SU1277224A1 |
| Устройство для дуговой сварки с короткими замыканиями дугового промежутка | 1987 |
|
SU1489940A2 |
| Электропривод с устройством для возбуждения синхронной машины | 1983 |
|
SU1262682A1 |
ЧЛ.АУ
I ll2l
«
I. л
fO
IL
00
O.
Cvl
P
