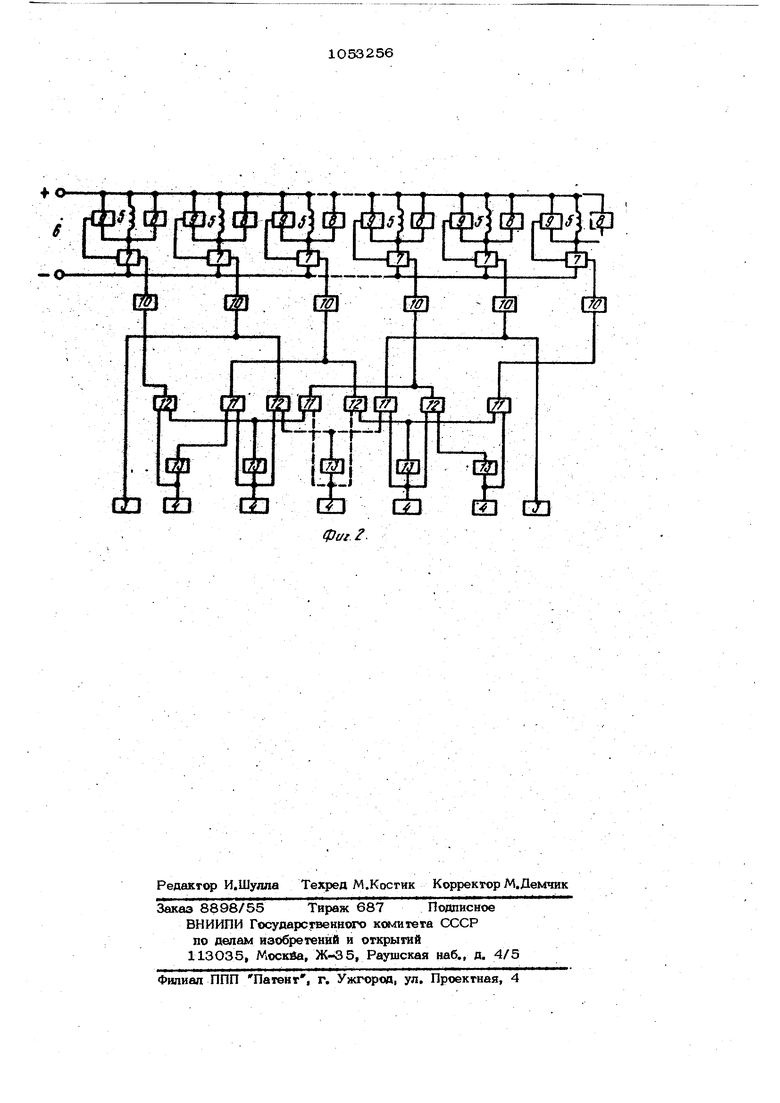
Изобретение огнсюигся к элекгротех нике и можег быть применено в горной промышпенносгв при создании эпекгромвгнигных машинГ; ударного . дейс вия, карьерного эдектр(4агнитного гране порта, в строительной технике при за- бивании свай, разработке мерзлых грунтов и т.д. Известно устройство для управления электромагнитной машиной возвратно-лос тупательнш о движения,, снабженной ц силовыми электромагнитами, установленны ми на направляющей трубе с расположенным в ней ферромагнитным якорем, содержашеё сило&ьш тиристоры и диоды,, подключакхцие обмотку каждого элекфомагнита к питающему выпрямителю, коммутирующие конденсатор, два трансформатора, каждый из которых имеет П -1 вторичных обмоток с «.включенными в них диодами и 2п-2) концевые и промежуточные датчики пoлoжeнияi связанные через диоды с пепями управления тиристоров, каждая из которых включает конденсатор, тиристор и диоды l , К недостаткам устройства относятся большое число (2 ц -2) датчиков по-.; ложения, находящихся на направляющей трубе, которая вО время работы машины подвергается ударным и вибрационным нагрузкам, что снижает надежность рабо ты устройства, а также теш1ош.1е перегрузки обмоток электромагнитов, которы обуславливаются тем, что в моменты под ключения и отключения каждой обмотки, последняя имеет небольшое значение пол нсяго с щротивления. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления элекгромагаитной машиной возвратно-поступательного движения, снаб женной силовыми электромагнитами, : установленными на направляющей трубе с расположенным в ней ферромагнитным якорем, содержащее fl ключей с цензами их отпирания, запирания и подготовки, подключающих обмотку каждого электромагнита к питающему выпрямителю, два концевых датчика положения, соединенны с Ш(пями отпирания второго и предпослед него ключей, Ц -i промежуточных датчиков положения и п -2 двухвходовых элемента И, соединенных выходами с цепями отпиранияостальных ключей д Недостатком известного устройства являются значительные тепловые перегрузки обмоток электромагнитов, которые обуславливаются тем, что в моменты подключения и отключения каждой об огки последняя имеет небольшое значение полного сопротивления, что приводит к значительным броскам тока и в конечном итоге к тому, что электромагнитная машина с данным устройством управления обладает низкими значениями КПД. Цель изобретения - повьшхение КПД электромагнитной машины. Указанная цель достигается тем, что устройство для управления электромагнитной машиной возвратно-поступательного движения снабжено II -2 дотюлнительными двувходовыми элементами И, И -1 элементами НЕ и п элементами :: задержки, выход каждого из основных и дополнительнь1Х элементов И соединен с цепью отпирания соответствующих , один из входов основных и дополнительных элементов И соединен с выходами соответствующих прсмежуточных датчиков положения, другой вход основных и дополнительных элементов И соединен с выходами соответствующих элементов НЕ, входы каждого из элементов НЕ подсоединены к выходам соответствующих промежуточных датчиков положения, причем элементы задержки входами подсоединены к обмоткам электромагнитов, а выходами т к цепям запирания ключей. На фиг. 1 схематически показано устройство, на фиг. 2 - блок-схема устройства. Устройство для управления электромагнитной машиной возвратнсм-поступательного движения состоит из направляющей трубы 1 с расположенным в ней ферромагнитным 5жорем 2, концевых 3 и промежуточных 4 датчиков положения якоря 2 и И -силовых электромагнитов 5, подключенных к. питающему выпрями телю 6 ключами 7. Обмотки электромагнитов 5 защунгированы разрядной цепью 8, К обмоткам электромагнитов 5 подсоединены входом элементы 9 задержки. Выходы элементов 9 задержки подсоединены к цепям 7 запирания ключей. Цепи 7 отпирания ключей чег)ез формирователи импульсов 10 подсоединены к выходам соответствукядих основных 11 и дополнительных 12 двухвходовых элементов И. Концевые датчики 3 положения через формирователи 1О импульсов подсоединены к цепям отпирания второго и предпоследнего ключа 7. Один из входов основных 11 и дополнительных 12 элементов И соединен с выходами соответствую;цихпромежуточных датчиков 4 положения, другой вход основных 11 и дополнительных 12 элементов И соединен с выходами соответствующих элементов НЕ 13. каждого из элементов НЕ 13 подсоединены к выходам соответствующих промежуточных датчиков попоже1шя 4. Якорь -.2 в конце рабочего ходи наносит удар по рабочему инструменту 14. Устройство работает следующим образом. Например, якорь 2 находится в левом (нижнем) крайнем положении (фиг.1). Цри этом срабатывают на включение датчики В и 4. Сигнал датчика 3 через формирователь 1О (фиг. 2) поступает на второй клюя 7. Ключ 7 отпирается и вто рой электромагнит 5 , подключается к питающему вьшрякштелсо 6. С этого вступает в работу элемент 9 задержки с которого запирается ключ 7, т.е. отключается электромагнит 5, При протекании тока по обмотке вто рого электромагнита 5 якорь 2 втягивается этим электромагнитом. По Мере втя гивания якоря 2 в определенный момент времени элемент 9 задержки,- подключенный параллельно обмотке второго эяектро магнита 5, выдает сигнал на запирание ключа 7, и, следовательно, на отключение вторсиго электромагнита 5 от выпрймид«ля 6. При этом запасенная электромагнитом 5 энергия магнитного пояя рассеивается в разрядной цепи 8, а якорь2 продолжает двигаться по инерции. Двигаясь по инерции, якорь 2 своей передней частью заставляет сработать следующий промежуточный датчик 4, при этом на входах двух элементов И 11 в 12, непос дственно связанных с датчиком 4, появляются /сигналы, а затем своей задней частью заставляет срабсигат второй промежуточный датчик 4 на выклк чение, при его передняя часть уже вошла во внутреннюю полость обмотки следящего электромагнита 5. В момент включения второго промажу-. точного д&тчика 4 через элемент НЕ 13 на другой вход основнсяго элемента И 11 поступает сигнал. Поэтому на выходе элемента И 11 возникает сигнал, который поступает через формирователь 1О на следующий ключ 7. Ключ 7 отпирается и следующий электромагнит 5 подключается к выпрямителю 6. Якорь 2 начинает втягиваться этим электромагнит ж1. По мере втягивания якоря 2 в определенный Момент времени элемент 9 задержки, подключенный параллельно обмотке электромагнита 5, выдает сигнал на запирание ключа 7 и, следовательно, на Отключение этого электромагнита от выпрямителя 6. При этом запасенная электромагнитом 5 эне1Яия магнитного пспя рассеивается в разрядной цепи 8, а якорь 2 продолжает двигаться по инерции. . . Двигаясь по инерции, якорь 2 своей передней частью за ставляет срабатывать на включение следующий по ходу якоря промежуточный датчик 4 и процессы повторяются. При достижении правого (верхнего) . . крайнего положения якоря 2 срабатывает на включение правый концевсЛ датчик 3 и в устройстве возникает состояние аналогичное при включении якорем 2 левого концевого датчика 3, После этсто як«фь 2 начинает двигаться в обратном направлении, соверщая рабочий ход, в конце которого наносится, например, удар по инструменту 14. Введение в устройство для упр:авления алектр1Яиагнитной машиной возвратно- 1ос ту па тельного движения дополнительных элементов И, НЕ и задержки, а также соответствующее вьшопнение связей между функциональными элементам11 привело к возможности включения и отклю. чения обмоток электромагнитов в мет-сенты времени, когда якорь находится внутри обмоток и при этом их пспное сопротивление близко к максимально возможHOMy, Таким образе, обеспечивается уменьщение энергетютребления машины и повышение ее КПД. (33
Фиг г. m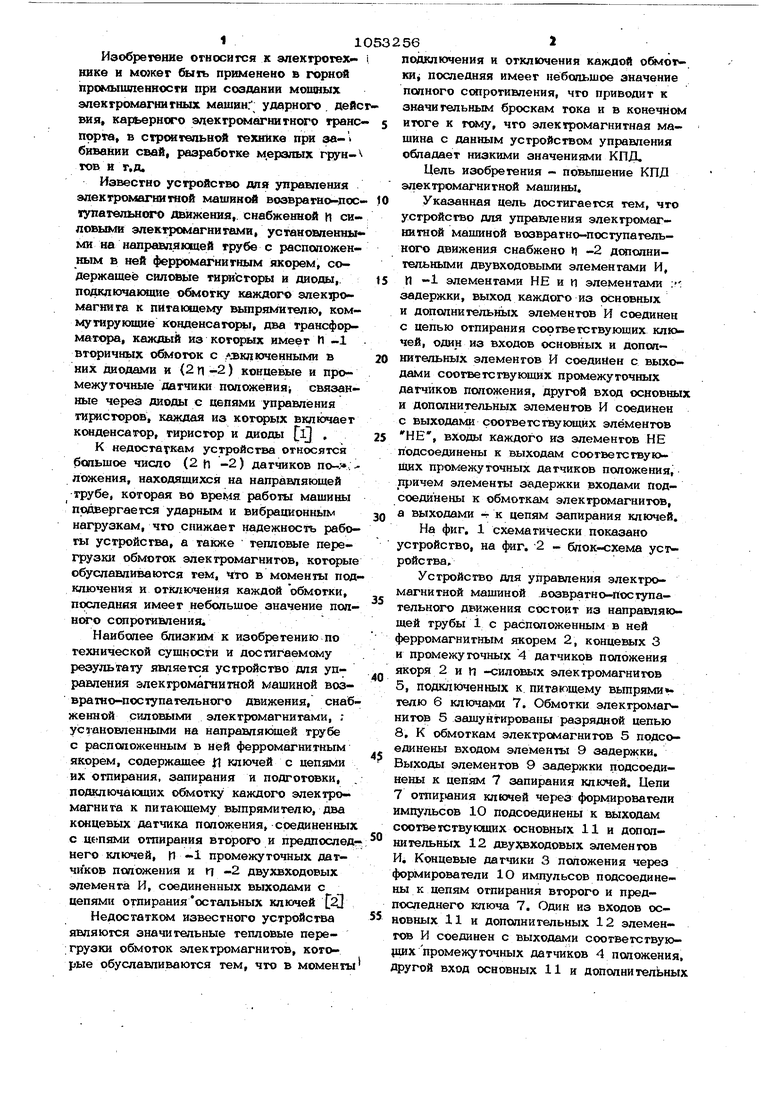
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1975 |
|
SU743154A1 |
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1980 |
|
SU944049A1 |
| Устройство управления электромагнитными приводами вспомогательных механизмов швейной машины | 1990 |
|
SU1784693A1 |
| Устройство для широтно-импульсного управления электромагнитом | 1982 |
|
SU1084730A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| ЭЛЕКТРОМАГНИТ С ФОРСИРОВКОЙ | 2003 |
|
RU2237305C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ аПЕКТРОМАГНИТНОЙ МАШИНОЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНСГО ДВИЖЁНИЯ, снабженной м снловьши электро магнитакга, установленными на направляю щей трубе с расположенным в ней ферр1 магнитным якорем, содержащее И с цепями их отирания, запираш1я и подгч 1Ч)вки подключающих обмотку каждого электромагнита к питающему млпрямителю, два конпевых датчика положения, соединенных с цепямм отпирания второ-: го и предпоследнего ключей, п -1 промежуточных датчиков положения и п -2 двухвходовых элементов И, соединенных выходами с цепями отоирания остальных ключей, отличающееся тем, что, с целью повышения КПД электромагнитной мащины, ycTpt cTBo снабжено YI -2 д Я оп1В1 тельными двухвходовыми э Гементами И, п-1 элементами НЕ и П элементами задержки, выход каждЬгр из основных и дополнительных элементов И соединен с цепью отпирания . соответствующих ключей, один из выходов основных и дополнительных элементов И соединен с выходами соответствующих промежуточных датчиков поя«кения, другой вход (юновных Н допопнятепьных элементов И соединен с выходами соответствуюршх элементов НЕ, входы каждсяго из элементов НЕ подсоединеtdbi к выходам соответствующих проМежу- точных датчик поповкения, причем элементь задержки ъхоавма подсоединены к охоткам электромагнитов, а выходами - к цепям зширания клкчёй.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское евидетедьство СССР, №743154, кп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1980 |
|
SU944049A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
