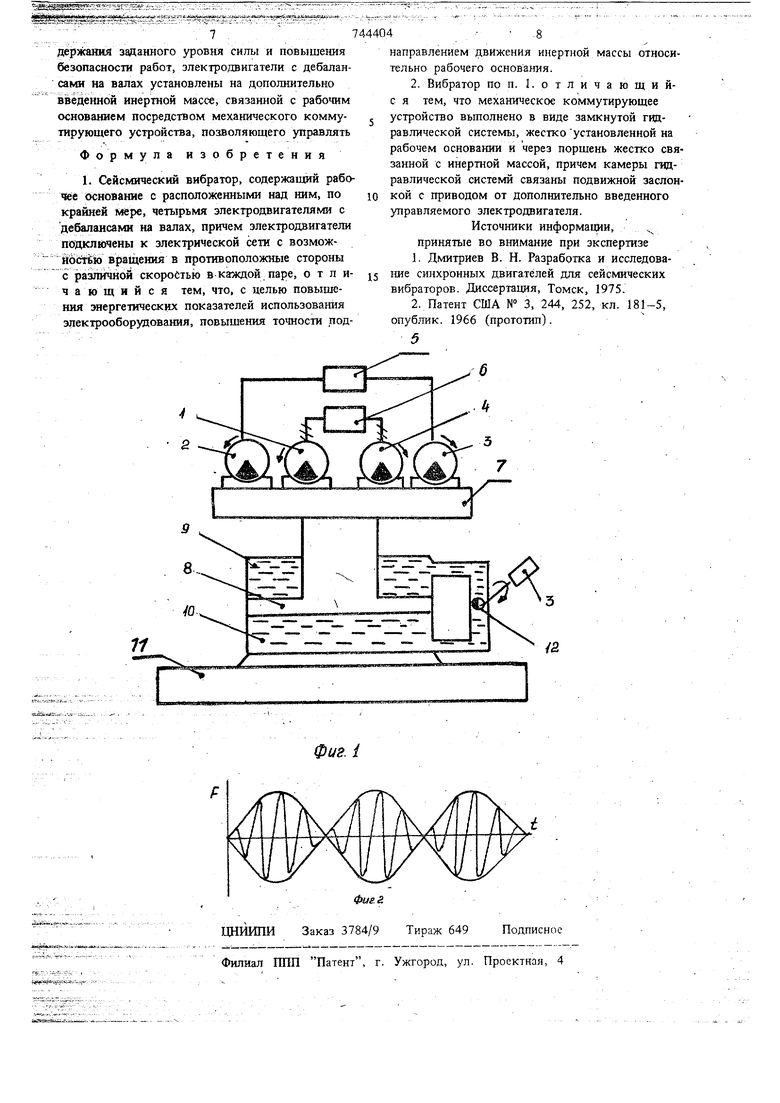
Изобретение относится к элементам конструкции устройств для генерирования сейсмической энергии и предназначено для применения в частотном методе геофизических исследований, а также может найти применение для вибрационных исследований крупных строительных конструкций, плотин и т.д. Известно устройство на базе центробежных вибраторов, обеспечивающих постоянный уровень силы при переменной частоте вибраций Наиболее близким по технической сущности к предлагаемому изобретению является сейсмический вибратор, содержащий рабочее основание с расположенными над ними, по крайней мере, четырьмя электродвигателями с дебалансами на валах, причем электродвигатели подключены к электрической сети с возможностью вращения в противоположные стороны с различ ной скоростью в каждой паре 2. В известных вибраторах частота колебаний изменяется скоростью вращения, а квадратичное возрастание силы каждого дебаланса при увеличении скорости вращения компенсируется ИЛИ фазовым рассогласованием дебалансов, или применением компенсирующих масс. Недостатками известных устройств являются повышенная опасность в зксплуатацин, что объясняется наличием дебалансных масс в больщим кинематическим моментом, величина которого выбирается из заданного уровня силы на минимальной частоте. При работе на высоких частотах, центробежная сила от каждого дебаланса достигает огромных значений, и требует применения специальных средств техники ; безопасности (защитные ограждения, необходимость работы обслуживающего персонала в безопасных зонах и т.д.); низкие энергетические показатели, обусловленные необходимостью работы электродвигателей на i низких скоростях вращения, т.е. на низких частотах питающей сети. Однако; известно, что с увеличением частоты улучшаются все энергетические показатели электрооборудования двигателей, источника питания и сдатемы управления, а именно, С тгрвь1шеняем частоты пропорционально растет ;мощность в тех же габаритах даигателей и источника питания, а главное уменьшаются потери по сравнению с режимом работы на низких частотах; трудность поддержания заданного уровня силы, вызванная тем, что на высоких частотах сила от каждого дебаланса в десятки раз преВы1шет заданный уровень силы и незначительное отклонение дебалансов заданного относительного расположения вызывает резкое отклонение силы от заданного уровня. Цель изобретения - повышение энергетических показателей использования электрооборудования, повышение точности поддержания заданного уровня силы и повышения безопасности работ. Поставленная цель достигается тем, что элек родвигатели с дебалансамн на валах установлен на дополнительно введенной инерционной массе связанной с рабочим основанием посредством механического коммути1)ующего устройства, позволяюшего управлять направлением движени инертной массы относительно рабочего основания; что механическое коммутирующее устройство вьшолнено в виде замкнутой гидравлической системы, жестко установленной на рабочем основании и через поршень жестко связа1шой с инертной массой, причем камеры гидравличес кой системы связаны подвижной заслонкой с приводом от дополнительно введенного управляемого злектродвигателя. На фиг. 1 приведен сейсмический вибратор; на фиг. 2 - зависимость амшгатуДь возбуждаемого сигнала во времени. Сейсмический вибратор содержит четЬ1ре синхронных дв|1гателя 1, 2, 3 и 4 с дебалансами на валах. Причем двигатели 1 и 2 подключены к различным источникам питания регулируемой частоты 5 и 6 с возможностью вр щения в одну сторону (показано стрелками). Дви гатели 3 и 4 также подключены к разным источникам питания регулируемой части 5 и 6, но с возможностью вращения в противоположную otopoHy относительно .двигателей 1 и2. Синхронные двигатели устаноЬлены на инертной массе 7, которая жеспсо соединена с порш нем 8. Гидравлические камеры 9 и 10 жестко закреплены на рабочем основании 11 и связаны между собой посредством подвижной заслонки 12, приводимой во вращение управляемым электродвигателем 13. Сейсмический вибратор работает следующим образом. После запуска двигателей 1, 2, 3 и 4 при одинаковой частоте источников питания 5 и 6 дебалансы возбуждают колебания с частотой питаняцей сети, при этом амплитуда силы неизменна. При изменении частоты источников питашгя, например, при увеличении частоть у источника 5 и таком же уменьшении частоты у источника 6, двигателя 1 и 2, а также 3 и 4 ращаются с различной скоростью, при этом астота колебания остается прежней, однако мплитуда силы изменяется от нуля в момент, огда силы от вибродвигателей 1 и 2, а также и 4 взаимно компенсируются, и до максимуа, когда эти силы суммируются, т.е. создаютя так назьшаемые биения с низкой частотой (фиг. 2). Полученные низкочастотные биения от инертой массы 2 передаются рабочему основанию 11 осредством поршня 8 и гидравлических камер Вращение заслонки 12 от управляемого электродвигателя 13 происходит со скоростью вращения двигателей 1, 2, 3 и 4, причем фаза вращения электродвигателя 13 относительно двигателей 1, 2, 3 и 4 такова, что заслонка является открытой, когда высокочастотная, сила направлена вверх, и закрыта, когда эта сила направлена вниз. Тогда рабочему основанию 11 передается сила только в момент закрытой заслонки, при направлении силы вниз. При открытой заслонке высокочастотная сила перемещает инертную массу 7 вверх. Таким образом рабочему основанию 11 передается только один полупериод изменения высокочастотной силы, а другой полупериод демпфируется свободным перемещением поршня и инертной массы 7. Затем, в момент равенства силы нулю, фаза вращения управляемого электродвигателя изменяется на 180°. Заслонка периодически закрывается, когда высокочастотная сила направлена вверх и открьшается, когда она направлена вниз. Таким образом, сила от инертной массы передается рабочему основанию только при направлении высокочастотной силы вверх, а направление движения инертной массы 7 относительно рабочего основания 11 при этом изменяется на противоположное. В итоге, рабочему основанию передаются синусоидальные низкочастотньй колебания с частотой биений. Изменение частоты вибраций достигается изменением соотношения частот источников питания 5 и 6 и частотой изменения фазы вращения электродвигателя 13., Постоянство амплитуды силы при изменении частоты биений (таким образом и частоты сейсмических колебаний) достигается увеличением частоты одного источника питания и равным уменьшением у другого источника питания. Очевидно, что механическое коммутирующее устройство, позволяющее управлять направлением движения инертной массы относительно рабочего основания может быть другого исполнения, например, в виде электромагнитного устройства или устройства в виде кинематических связей, позволяющих осуществить управление 5 направлением движения инертной массы относительно рабочего основания. В заключение приведем расчетные данные известного 2 и предложенного вибратора; предназначенные для решения одной задачи. Пустьнеобходимо в диапазоне 1-10 Гц обеспечить синусоидальную силу в 4 т. Известное устройство содержит четыре элек родвигателя, с дебалансами и компенсаторами на валах, вращающихся в противоположные стороны. Кинематический момент moR выбирается из условия обеспечения силы на частоте 1 Гц, т.е 03 6,28 1/с€К. 4moRw 4 т 40000 Н Отсюда „,„ R 40000 250 кГм. 4-6,28 Тогда на частоте 10 Гц сила от одного дебалан са будет составлять: F 250 кГм.(6,28-10) 1000000 Н 10 Для получения силы в бдну тонну необходима сила от компенсатора - 99 т. - Мощность двигателей от частоты зависит по формуле Р M.27rf, где М - момент, зависящий от габаритов двигателя. Таким образом, на низких частотах для получения заданной мощности сейсмических ко лебаний необходимо увеличивать габариты двигателя. То же можно сказать и об источниках питания. Кроме того, на низких частотах возрастает влияние активного сопротивления статора, что вызывает увеличение активных потер и снижение КПД. Точность поддержания постоянного уровня силы достигается смещением компенсирующей массы. При зтом отклонение величины смещения от заданной всего на 1% вызьшает изменение силы на 1%, что составляет 0,99 т или 99% от величины заданной силы - 1 т. г.. г Практически обеспечить в условиях вибраЬий смещение компенсатора весом в сотни кГ с точностью выще 1% является весьма трудной задачей, поэтому величина силы и известного вибратора в больщой степени зависит от случайных факторов - амплитуды колебаний подпружиненного компенсатора на направляющей (при резонансе амплитуда может достигать больших значений), трения в паре компенсаторнаправляющая, .стабильности параметров пружины ИЛ1 системы пружин и т.д. Предложенный сейсмический вибратор: 4 электродвигателя - средняя частота се.ти - 100 Гд, cj 628 1/сек. Кинематический момент выбирается из условия обеспечения заданной силы и частоты вращения двигателей. ,4moRcj 40000 Н 40000 „ 40000 X 0,025 кГм, 4(628) 4-400000 При работе на частоте 100 Гц, мощность развиваемыми двигателями ;превышает мощ-., ность на частоте 1 Гц в 100 раз и на частоте 10 Гц - в 10 раз. Средняя частота источников питания 100 Гц. Для получения частоты биений 10 Гц, необходимо увеличить частоту у одного источника до 105 Гц и уменьшить у дрзтого источника до 95 Гц. При этом амплитуда силы останется неизменной. Аналопетно получаем любую другую частоту в диапазоне 1-10 Гц, при этом точность поддержания заданного уровня силы определяется только точностью поддержания частоты источников питания. У современных промышленных источников отклонение частоты от заданной не превьйцает 0,5 - 1%. Сравнивая расчетные данные, можно сделать следующие вьшоды. Применение известного вибратора 2 для решения поставленной задачи требует использования дебалансов с кинематическим моментом в 10. 000 раз большим, чем у предлагаемого вибратора. При этом сила от дебаланса в извес ном вибраторе на. частоте 0 Гц j составляет 100т, что превышает сйлу дебалаисов у предлагаемого вибратора в 100 раз. Кроме того, компенсирующая масса создает усилие в 99 тонн. Таким образом, у известного вибратора конструкции дебалансов, направляющих и компенсируюшлх масс должны быть рассчитаны на силу до 100 тонн и требуют применения специальньвс средств техники, безопасности. У предложенного вибратора, несмотря на большую скорость вращения, вследствие очень маленькой величины дебалансов и меньшей силы достато.чно использование обычных защитных фланцев, используемых у промьпиленных вибродвигателей.Применение предложенного вибратора, вследствие большей по сравнению с известным частотой питаюш позволяет повысить энергетические показатели электрооборудовайия. Применение предложенного вибратора позволяет обеспечить достаточно высокую точность поддержания постоянного уровня силы, в то время как у известного вибратора (2 сила является функцией многих нестабильных факторов и может изменяться в широких пределах. Следует также отметать, что предложенный вибратор может обеспечивать не только постоянный уровень силы, но и любой другой закон изменения сипы независимо от изменения частоты.
держания заданного уровня силы и повышения безопасности работ, электродвигатели с дебалансами на валах установлены на дополнительно введенной инертной массе, связанной с рабочим основанием посредством механического коммутирующего устройства, позволяющего управлять
Формула изобретения
1. Сейсмический вибратор, содержаш 1Й работе основание с расположенными над ним, по крайней мере, четырьмя электродвигателями с дебалансамн на валах, причем электродвигатели подключены к электрической сети с возможйбШю вращения в противоположные стороны с различной скоростью в каждой паре, о т л ичающийся тем, что, с целью повышения энергетических показателей использования электрооборудования, повышения точности поднаправлением движения инертной массы относительно рабочего основания.
2. Вибратор по п. 1.отличающийс я тем, что механическое коммутирующее устройство вьтолнено в виде замкнутой гидравлической системы, жестко установленной на рабочем основании и через поршень жестко связанной с инертной массой, причем камеры гидравлической системй связаны подвижной заслонкой с приводом от дополнительно введенного управляемого электродвигателя.
Источники информагШи, , принятые во внимание при экспертизе
1.Дмитриев В. Н. Разработка и исследование синхронных двигателей для сейсмических вибраторов. Диссертация, Томск, 1975.
2.Патент США № 3, 244, 252, кл. 181-5, опублик. 1966 (прототип).
5
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ ВИБРАЦИОННЫХ КОЛЕБАНИЙ ДЛЯ ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2387488C1 |
| ВИБРОМАШИНА | 2008 |
|
RU2383396C1 |
| Источник упругих колебаний для вибросейсмической разведки | 1972 |
|
SU440624A1 |
| Грохот инерционный | 1976 |
|
SU598661A1 |
| ВИБРАЦИОННЫЙ СТАНОК | 1991 |
|
RU2014204C1 |
| Вибратор для сейсмических исследований | 1977 |
|
SU748310A1 |
| СКВАЖИННЫЙ ВИБРАТОР С УПРАВЛЕНИЕМ ЧЕРЕЗ КАРОТАЖНЫЙ КАБЕЛЬ | 1996 |
|
RU2112253C1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| СПОСОБ СЕЙСМОВОЛНОВОГО РАЗУПРОЧНЕНИЯ УГОЛЬНЫХ МАССИВОВ И СКВАЖИННЫЙ СЕЙСМОВИБРАТОР | 2010 |
|
RU2449108C1 |
| Способ настройки на многокомпонентные резонансные колебания вибромашин с нелинейными упругими связями | 1989 |
|
SU1713671A1 |
