(54) УСТЮЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ Изобретение относится к программному утира лению, в частности к фазовым устройствам про граммного управления с числовым вводом информации и может быть использовано, прежде всего, в промышленных роботах и станках с программным управлением, применяемых в различных областях народного хозяйства. Известно устройство для программного управ ления положением объектов с числовым вводом информации, в котором контур управления поло-1 жением содержит преобразователь числа в сдвиг фазы, преобразователь положения в сдвиг фазы и узел сравнения фаз, выходной сигнал которого управляет приводом, В качестве преобразователя положения используется фазовращатель на базе индукционного датчика, например, вращающегося трансформатора, цепь питания которого состоит из последовательно соединенных генератора импульсов, делителя частоты и формирователя напряжения Т. - -.«..,«.;,... Наиболее боизким по технической сзшшости к предлагаемому является фазовое устройство для программного управления с числовым вводом информации, содержащее последовательно
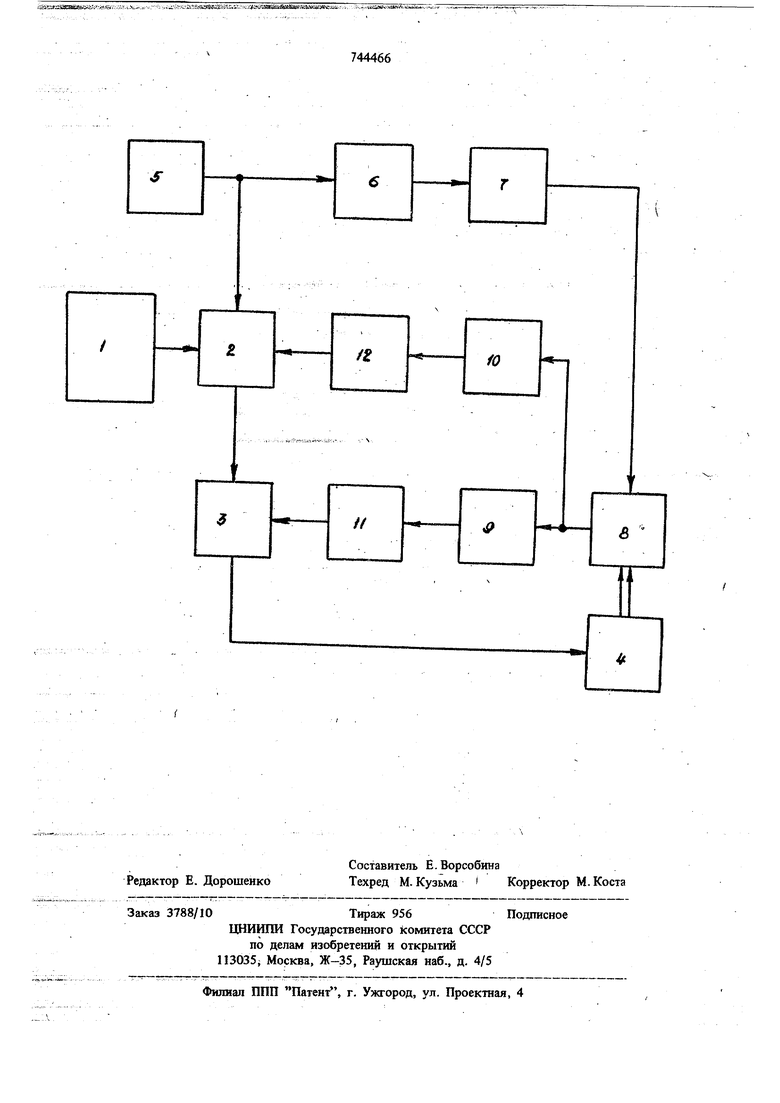
ОБЬЕКТА соединенные устройство задания программы, узел совпадения чисел, узел сравнения фаз и привод, последовательно соединенные генератор импульсов, делитель частоты, формирователь синусоидального напряжения, фазовращатель и формирователь импульсов, выход которого соединен с другим входом устройства сравнения фаз, промежуточные выходы делителя частоты соединены с другими входами узла совпадения чисел. Последний выполняет функцию преобразования числа в сдвиг фазы. В момент совпадения кода преобразуемого числа и кода числа, снимаемого с промежуточных выходов делителя частоты, на выходе узла совпадения чисел появляется импульс, временной сдвиг которого относительно момента исходного состояния делителя частоты пропорционален весу преобразуемого числа. Напряжение питания фазовращателя синхронизировано прямоугольными импульсами с выхода делителя частоты. Фаза зтих Импульсов является опорной (задающей начало отсчета) для сдвигов фаз, пропорциональных заданному и текущему положениям 2. Недостатком описанного устройства является |относительно низкая точность управления положением. Эта точность определяется в основном точностью преобразования положения в сдвиг фазы, так как погрешность преобразования числа не превышает погрешности квантования и может быть сведена к малой величине соответствующим выбором разрядности, а погрёш кость узла сравнения фаз можно учитывать, поскольку выделение рассогласования -- сдвига фаз импульсных сигналов - и преобразование его в широтно-модулированный сигнал может бь1тъ выполнено быстродействуюшей триггерной схемой. Погрешность преобразования положения в сдвиг фазы с помощью широко распространенных датчиков - сельсинов и вращающихся трансформаторов - имеет существенную величину, особенно при воздействии дестабилизирующих факторов, таких как изменение температуры, частоты питания и других. Эта погрешность может значительно превышать инстрз ментальную погрешность датчика. Таким образом, описанное выше устройству не позволяет реализовать высокую инструментальную точность датчиков, что является его недостатком. Цель изобретения - повь1шение точности устройства. Постайленная цель достигается тем, что в устройство для программного управлений положением объекта, содержащее посл1гдова1ейШб соединенные задатчик программы, счётчик, блок сравнения, привод и датчик положения, наприме -вращающийся трансформатор, а также генё{за1Ор импульсов, выход которого подключен ко вто рому fikOfly счетчика и через последовательно соёдуШённьге делитель, частоты и формирователь напряжен1ия - ко второму входу вращающегося трансформатора, первый выход которого подкл чей через последовательно соединенные первый фазосдвигающий блок и первый формирователь импульсов ко второму входу блока сравйения, введены второй фазосдвигающий блок и второй формирователь импульсов, выход которого под ключей к третьему входу счетчика, выход второго фазосдвигающего блока Соединен ев втОрым выходом вращающегося трансформатора, а выход - со входом второго формирователя им ПулШЗб. - На чертеже изображена блок-схема устройства для программного управления положением объекта. Устройство содерзкит задатчик I программы. счетчик 2, блок 3 сравнения, привод 4, генератор 5 импульсов, делитель 6 Частоты, форМйроватёль 7 напряжения, вращающийся трансформатор 8, первый фазбсдвотающий ёлок , второй фазосдвигающий блок 10, первый форирователь 1J импульсов, второй формирователь 12 )СОв. Трансформатор 8 вместе с блоками 9 и 10 (RC-цепочками) представляют собой фазовращатель с двумя выходами. Элементы блока 9 соединены в обратной последовательности по отношению к злементам блока 10, поэтому при ийМёйении УГЛОВОГО положения ротора трансформатора 8 фазы напряжений, снимаемых с блоков 9 и 10 сдвигаются в противоположных направлениях. Этот сдвиг фаз, пропорциональный угловому положению ротора, преобразуется в интервал времени с помощью формирователей 11 и 12, выделяющих короткие импульсы в моменты перехода синусоидального напряжения через нулевой уровень в одну сторону.. Устройство работает следующим образом. Положение объекта задается по программе в виде двоичного параллельного кода числа, Поступающего нга задатчика 1. Это число преобразуется в сдвиг фазы (интервал времени с помощью циклически работающего на вычитание счетчика 2, в который импульс формирователя 12 заносит преобразуемое число. Временной сдвиг момента обнуления счетчика 2 относительно момента записи Ё счетчик преобразуемого числа пропорщюнален весу числа. Таким образом, опорной фазой системы управления служит фаза сигнала, снимаемого с выхода фазосдвигающего блока 10 (RC-цепочки). Сдвиги фаз (интервалы времени), пропорционалыаге заданному по программе положению, а также текущему положению сравниваются блоком 3, выходной широтно-модулированный сигнал которото управляет приводом. При изменении температуры окружаюией фёДы фазы напряжений снимаемых с блоков 9 и 10 (а следовательно и фазы сигналов на входах блока 3) смещаются в одном направлении, практически, на одинаковую величину, что обеспечивает отсутствие температурной погрешности управления положением. №иеет место также резкое уменьшение влияния на точность ряда других факторов, например, ухода частоты пи тания трансформатора 8, что позволяет снизить требование стабштьиости частоты генератора 5. Численная оценка увеличения точности управления положением зависит от температурного диапазона работы системы управления, а также от количества применяемых датчиков. По результатам, полученным при использовании наиболее точных из серийно выпускаемых одйоотсчетных синусно-косинусных вращающихся трансформаторов при их однофазном питании и применении двух (RC-цепочек) погрепшость управления положением может быть сведена к величине порядка 5 мин угла в диапазоне температуры 10-50 С окрзокающей среды.
Этот эффект увеличения точности в наибольей степени проявляется в системах программноо управления промышленными роботами, осоенность которых, состоит в формировашш программы методом обучения прн ручном управ- j пении исполнительным органом, благодаря чему в погрешность программного управления положением не входнт систематическая погрешность измерения положения, так как она учитывается при обучении. Эта особенность еще бо- ю лее увеличивает преимущество в точности предлагаемого технического решения по сравнению с известным техническим решением.
Другой особенностью промышленных роботов является их использование в условиях, небла- is гоприятных для человека, в том числе при , овьпиённой температуре (загрузка печей обжига, анесение покрытий на горячие изделия, в литейном производстве и тд.).
При зтом датчики положения, установленные о на рабочем органе, подвергаются повышенному температурному воздействию, не постоянному по величине, что выдвигает особые требования к температурной стабильности измерительной части . устройства. Этим требованиям 2$ удовлетворяет предлагаемое устройство для программного управления объектом, обеспечивающее высокую точность управления положением в условиях больших изменений температуры в рабочей зоне промышленного робота.
Формула изобретени
Устройство для программного управления положением объекта, содержащее последовательно соединенные задатчик программы, счетчик, блок сравнения, привод и датчик положения, например вращающийся трансформатор, а также генератор импульсов, выход которого подключен ко второму входу счеикка и через последовательно соединенные делитель частоты и формирователь напряжения - ко второму входу вращающегося трансформатора, первый выход которого подключен через последовательно соединенные первый фазосдвигаюший блок и первый формирователь импульсов ко второму входу блока сравнения, отличающееся тем,что, с: целью повышения точности Устройства, в него введены второй фазосдвнгающий блок и второй формирователь импульсов, выход которого подключен к третьему входу счетчика, выход ъторОто фазосдвигаюшего блока соединен со . вторым выходом вращающегося трансформатора, а выход - со входом второго формирователя импульсов.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 428358, кл. (}05 В 15/02, 1972.
2.Авторское свидетельство СССР № 167117, кл. Q05 В 19/18, 1963 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU669374A1 |
| Многоотсчетный преобразователь перемещение-код | 1973 |
|
SU442501A1 |
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| Преобразователь угол-дискретное приращение фазы | 1977 |
|
SU710057A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752423A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Устройство для программного управления позиционированием | 1982 |
|
SU1118965A1 |
.-:- г -:+-r - f
fO
s
