ния соединен через второй логический элемент И с выходом второго формирователя импульсов, а входы предварительной установки его соединены с выходами счетчика, с вторыми входами цифровых компараторов и одними из входор измерителя разности фаз, вторые входы которого соединены с входами постоянных запоминающих блоков и входами блока логических элементов И, выходы которого
01
соединены с второй . входной шиной сумматора, синхронизирующий вход измерителя разности фаз соединен с выходом второго формирователя импульсов, а выходы измерителя - с управляюдими входами блока алгебраического суммирования, первого и второго логических элементов И и блока логических элементов И, выход первого формирователя импульсов соединен с входом установки в Осчетчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| Электропривод с частотно-токовым управлением | 1987 |
|
SU1495973A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1279042A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |
| Электропривод переменного тока | 1987 |
|
SU1501241A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель, обмотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененный с валом двигателя, а многофазной обмоткой соедененный с многофазным источником синусоидального напряжения, фазосдвигающий блок, блок измерения разности фаз, о т л и ч а ющ и и с я тем, что, с целью повыше- . ния точности поддержания мгновенной частоты вращения, в него дополнительно введены управляемый генератор импульсов, два формирователи импульсов, цифровые компараторы и постоянные запоминающие блоки по числу фаз регулируемого преобразователя, а фазосдвигающий блок составлен из сумматора, блока алгебраического суммирования, формирователя входных команд постоянных запоминающих блоков, трех делителей частоты, двух логических элементов И, форт ирователя опорного входного кода блока алгебраического суммирования, счетчика и блока логических элементов И, при этом управляемый генератор импульсов выходом подключен к входу многофазного источника синусоидального напряжения, два формирователя импульсов подключены входами соответственно к одной из фаз многофазного источника синусоидального напряжения и к выходной обмотке фазовращателя, выходы цифровых компараторов подключены к многофазному регулируемому преобразователю, первые входы цифровых компараторов соединены с выходами постоянных запоминающих блоков, входами соединенных с выходами формирователя входных команд постоянных запоминаюсдих блоков, тактирующий вход по(Л следнего через первый делитель частоты и первый логический элемент И соединен с выходом управляемого генератора, синхронизирующий вход формирователя входных команд постоянных запоминающих блоков соединен с выходом второго формирователя-импульсов, а выходы предварительной установки формирователя входных команд постоянных запоминакицих блоков соедин ны с выходами сумматора, одна входная шина которого соединена с выходами блока алгебраического суммирования, входами подключенного к вых1 дам счетчика и формирователя опорного входного кода блока алгебраического суммирования, тактирующие входы которых через второй и третий делители частоты соединены с выходом управляемого генератора импульсов, причем синхронизирующий вход формирователя опорного входного кода блока алгебраического суммирова
Изобретение относится к электротехнике, а точнее к устройствам дл регулирования числа оборотов и крутящего момента электродвигателей переменного тока путем регулирования тока статора, и может быть использовано для )егулирования и стабилизаци мгновенной скорости двигателей в прецезионных системах синхронных электроприводов приборов автоматического управления, телемеханики, измерительных преобразователей дпя исследования физико-механических свойств веществ.
Известен управляемый электропривод, содержащий управляемый источник питания, выходом подключенный к синхронному электродвигателю, послдовательно соединенные датчик, механически связанный с электродвигателем, фильтр первой гармоники, фазовьй детектор, фазовращатель, вход которого соединен с выходом управляемого источника питания, а выход - с вторым входом фазового детектора, причем выход последнего подключен к управляющему входу источника питания РЗ . I
Однако в схеме этого устройства
отсутствует опорный сигнал, относительно которого должна происходить стабилизация скорости, т.е. углового положения ротора, изменяющегося во времени. Управление происходит по углу нагрузки - углу мевду вектором поля статора (напряжением на статоре двигателя) и вектором поля рото ра. Таким образом, речь может идти не о стабилизации скорости ротора, а лишь о сглаживании его колебаний. Статическая система регулирования по нагрузке не обеспечивает стабилизации скорости при периодических изменениях момента нагрузки от нуля до номинального, что необходимо влечет за собой соответствующее изменение угла нагрузки от нуля до , а следовательно и мгновенной скорости ротора.
Кроме того, указанное устройство не обеспечивает регулирования положения вектора поля статора относительно положения ротора, т.е. максимального момента при пуске и торможении .
Наиболее близким по технической сущности к изобретению- является управляемый электропривод, содержащий синхронный двигатель, обмотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененный с валом двигателя, а многофазной обмоткой соединенный с многофазным источником синусоидального напряжения, фазосдвигаийдий блок, вход которого с динен с выходом блока измерения разности фаз, входы которого связаны с фазовращателем и задающим генератором, при этом фазосдвигающий блок соединен с управляющим входом преоб.разователя.
Электропривод обеспечивает работу двигателя в режиме бесколлекторного двигателя постоянного тока и аналогичные механические характеристики 2J .
Однако данный электропривод для повьшения точности поддержания мгновенной скорости требует замкнутой системы с обратной связью по скорос двигателя, при реализации которой в никает проблема обеспечения устойч вости. К тому же, этот электропривод имеет в своей структуре такие аналоговые блоки, как блок умножения, измери- ель разности фаз регулирующи фазосдвигающие элементы, фазовые выпрямители, которые как правило, не могут обеспечить точности большей 1.2%, что обусловливает общую погрешность устройства управления .4-8%. Цель изобретения - повьппение точности поддержания мгновенной частоты вращения. Поставленная цель достигается тем что в управляемый электропривод, содержащий синхронный двигатель,обмотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененный с валом-двигателя, а многофазной обмоткой соединенный с многофазным источником синусоидального напряжения фазосдвигающий блок, блок измерения разности фаз, дополнительно введены управляемьй генератор импульсов, два формирователя импульсов, цифровые компараторы и постоянные запоминающие блоки по числу фаз регулируемого пре образователя, а фазосдвигающий блок составлен из сумматора, блока алгебраического суммирования, формиро- вателя входных команд постоянных запоминающих блоков, трех делителей частоты, двух логических элементов И формирователя опорного входного кода блока алгебраического суммирования, счетчика и блока логических элементов И, при этом управляемый генератор импульсов выходом подключен к входу многофазного источника синусоидального напряжения, два формирователя импульсов подключены входами соответственно к одной из фаз многофазного источника синусоидального напряжения и к выходной обмотке фазовращателя, выходы цифревых компараторов подключены к многофазному регулируемому преобразователю, первые входы цифровых компараторов соединены с выходами постоянных запоминающих блоков, входами соединенных с выходами формирователя входных комалд постоянных запом нающих блоков, тактирующий вход последнего через первый делитель частоты и первьй логический элемент И соединен с.выходом управляемого генератора, синхронизирующий вход формирователя входных команд постоянных запоминающих блоков соединен с выходом второго формирователя импульсов, а входы предварительной установки формирователя входных команд постоянных запоминакмдих блоков соединены с выходами сумматора, одна входная шина которого соединена с выходами блока алгебраического суммирования, входами подключенного к выходам счетчика и формирователя опорного входного кода блока алгебраического суммирования, тактирующие входы которых через второй и третий делители частоты соединены с выходом управляемого генератора импульсов причем синхронизирующий вход формиро- вателя опорного входного кода блока алгебраического суммирования соединен через второй логический элемент И с выходом второго формирователя импульсов, а входы предварительной установки его соединены с выходами счетчика, с вторыми входами цифровых компараторов и одними из входов измерителя разности фаз, вторые входы которого соединены с входами постоянных запоминаниях блоков и входами блока логических элемейтов И, выходы которого соединены с второй входной шиной сумматора, синхронизирующий вход измерителя разности фаз соединен с выходом вто- . рого формирователя импульсов, а измерителя - с управляющими входами блока алгебраического суммирозания, первого и второго логических элементов И и блока логических элементов И, выход первого формирователя импульсов соединен с входсж установки в О счетчика. На фиг.1 дана структурная схема управляемого электропривода} на фиг.2 - диаграммы работы устройства. Управляемый электропривод содержит синхроннь двигатель 1., обмотки которого подключены к выходу многофазного регулируемого преобразователя 2, фазовращатель 3, сочлененный с валом двигателя, -а многофазной обмоткой соединенный с многофазным источником 4 синусоидального напряжения, фазосдвигающий блок 5,
блок 6 измерения разности фаз. Дополнительно имеетсй управляемый генератор 7 импульсов, два формирователя 8 и 9 импульсов, цифровые компараторы 10 и постоянные запоминаю цие бло- 5 ки 11 по числу фаз регулируемого преобразователя. Фазосдвигающий блок составлен из сумматора 12 блока 13 алгебраического суммирования, формирователя 14 входных команд постоян-О ных запоминаюпр х блоков, трех делителей 15-17 частоты, двух логических элементов И 18 и 19, формирователя 20 опорного входного кода блока алгебраического суммирования, счетчи- 5 ка 21 и блока 22 логических элементов И.
Управляемый генератор 7 импульсов выходом подключен к входу многофазного источника 4 синусоидального напряжения, два формирователя В И 9 импульсов подключены входами соответственно к одной из фаз многофазного источника 4 синусоидального напряжения и к выходной обмотке фазовращателя 3, выходы цифровых компаратором 10 подключены к многофазному регулируемому преобразователю 2, первые входы цифровых компараторов 10 связаны с выходаю постоянных запоминающих блоков 11, входами соединяющих с выходами формирователя 14 входных команд постоянных запоминающих блоков, тактируняций вход формиро вателя 14 входных команд постоянных 35 запоминающих блоков через первый делитель 15 частоты и первьй логический злемент И 18 связан с выходом управляемого генератора 7, синхронизирующий вход формирователя 14 входных команд постоянных запоминающих блоков соединен с выходом второго формирователя 9 импульсов, а входы предварительной установки форюгрователя 44 входных команд постоянных 45 зaпo шнaющиx блоков соединены с выходами сумматора 12, одна входная соина которого связана с выходами блока 13 алгебраического суммирования, входами подключенного к выходам счетчика 21 50 и фop alpoвaтeля 20 опорного входного кода блока алгебраического суммирования, тактирукщие входы счетчика 21 и формирователя 20 опо|)ного входного кода блока алгебраического суммиро- 55 вания через второй 1.6 и третий 17 делителя частоты связаны с выходом управляемого генератора 7 импульсов.
причем, синхронизирующий вход формирователя 20 соединен через второй логический элемент И 19 с выходом второго формирователя 9 импульсов, а входы предварительной установки формирователя 20 опорного входного кода блока алгебраического суммирования соединены с выходами счетчика 21, с вторыми входами цифровых компараторов 10 и одними из входов измерителя 6, разности фаз вторые входы которого соединены с входами постоянных запоминающих блоков 11 и входами блока 22 логических элементов И, вьжоды которого связаны с второй входной шиной сумматора 1 синхронизирующий вход измерителя разности фаз 6 соединен с выходом второго формирователя 9 импульсов, а выходы измерителя 6 - с управляющими входами блока 13 алгебраического суммирования, первого 18 и второго 19 логических элементов И И блока 22 логических элементов И, выход первого формирователя 8 импульсов соединен с входом установки счетчика 21.
Устройство работает следующим образом.
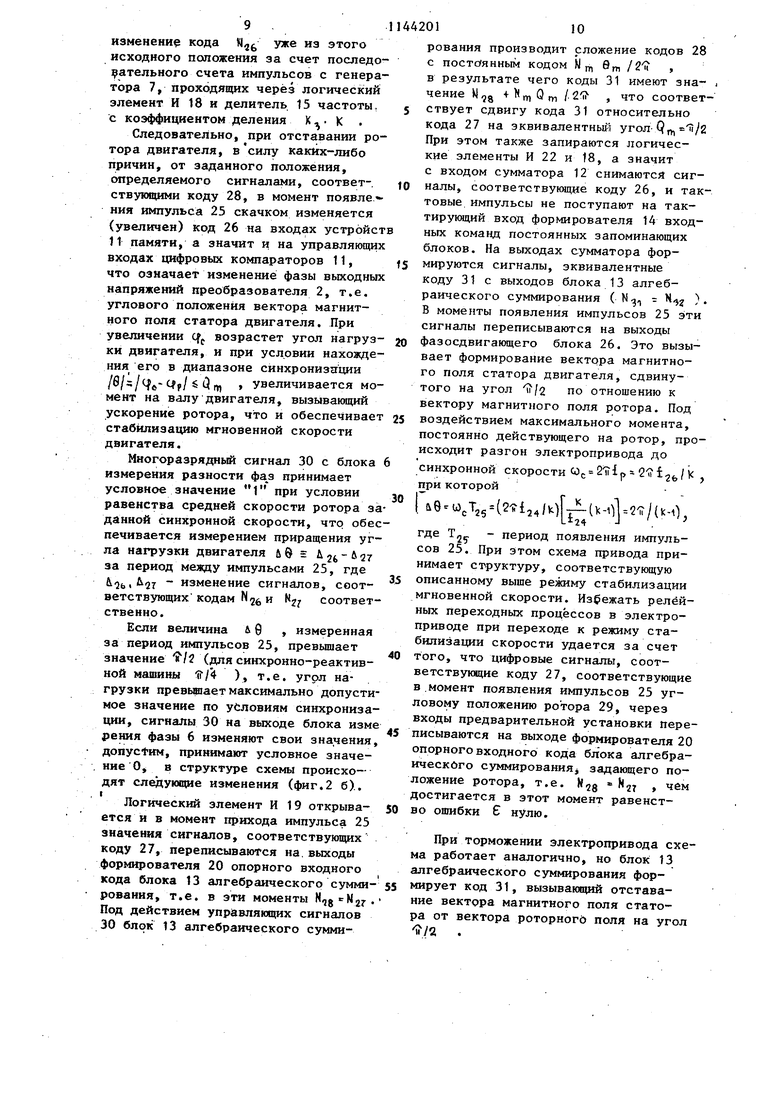
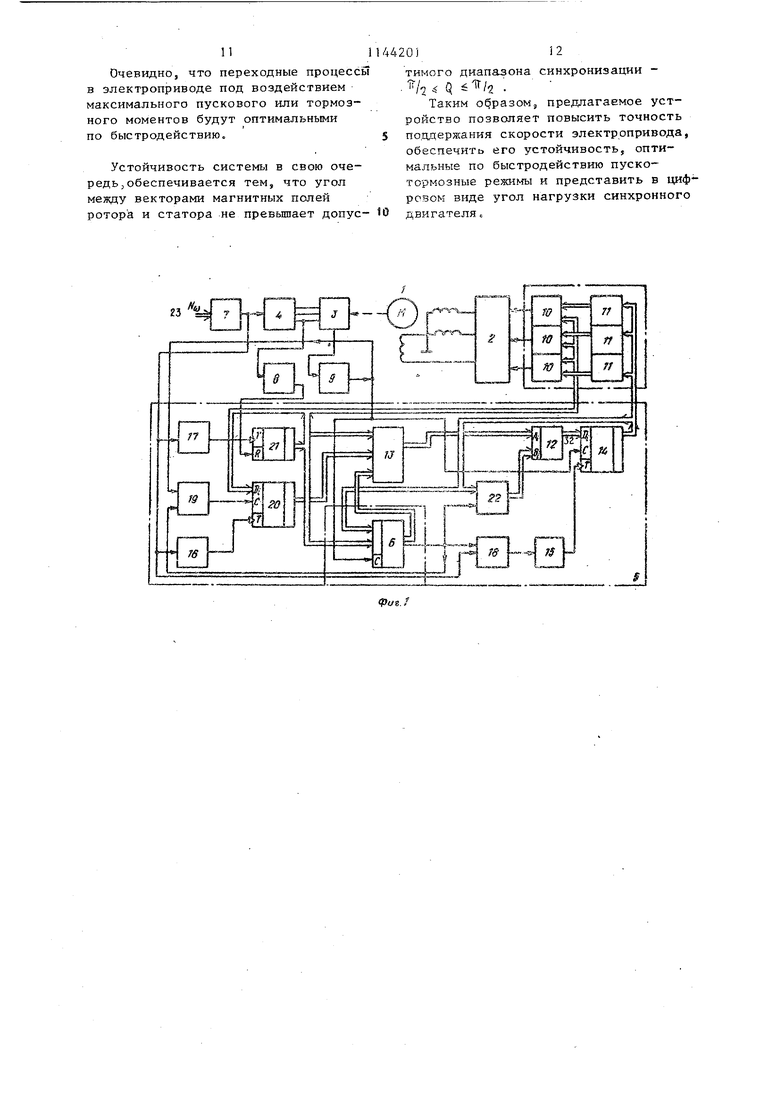
Управлякяций генератор 7 вырабатывает импульсы, имеющие частоту, пропорциональную коду Ко на управляющих входах 23 генератора 7. Импульсы поступают на вход многофазного источника 4 синусоидального напряжения, питающего многофазный фазовращатель З, и 6а вход фазосдвигающего блока 5, синхронизированного импульсами 24 и 25 (фиг,2) соответственно с формирователей 8 и 9 коротких импульсов, генерирующих сигналы в моменты перехода входных напряжений формирователей 8 и 9 через нулевые значения. Фазосдвигающий блок 5 производит интегрирование заданной частоты посредством последовательного счета импульсов с выхода управляемого генератора 7, последующую обработку результатов интегрирования .и выходных кодов с измерителя 6 разности фаз, определяющего угол нагрузки синхронного двигателя за период между импульсами 25, в итге чего на выходе фазосдвигающего блка 5 формируется эквивалент фазы вектора -магнитного поля статора двигателя - код 26 (фиг.2), изменяющийся во времени и формирующий входные команды постоянных запоминающи блоков 11, а следовательно, средние за период коммутации ключей пр образователя 2 значения напряжений на выходах этого многофазного прео разователя, определянщие угловое п жение Cfp вектора статорного поля двигателя 1. Выполнение заданных функций обе печивается структурой фазосдвигающего блока 5 и связями между его элементами. Импульсы с выхода генератора 7 имеют частоту, зависящую от управ N лягощего кода ш io i°Nco : K(H,, где )(з коэффициент, учитывакяди соотношение частот на в де и выходе многофазног источника 4 синусоидаль ного напряжения, число коммутаций ключей силового преобразователя с широтно-им- пульсной модуляцией за период его выходной час ты, максимально возможное з чение кода на выходах разрядного счетчика 21 и разрядных счетчиков, на которых реализованы формирователь 14 входных команд постоянных запоминающих блоков и формирователь 20 опорного входного кода блока алгебраического суммирования, ip- Up|7H - заданная частота вращения ротора, число пар полюсов двигателя, i - шаг дискретного изменения частоты генератора 7. Эти импульсы через делитель 17 частоты с коэффициентом деления по ступают на тактирующий вход счетчи ка 21, обнуляемого импульсами 24 с выхода формирователя 8. Частота напряжения многофазного источника 4 синусоидального напряжения в К раз выше заданной выходной час тоты преобразователя 2i Р и следовательно, совпадает с часто той формирования кода 27 счетчика которьй, являясь кодом развертки для комйараторов 10, одновременно несет инфор 1ацию об угловом положении импульсов 25 как разность фаз меязду импульсами 24 и 25, пропорциональная угловому отклонению ротора фазовращателя 3, жестко связанного с ротором двигателя 1, В режиме стабилизации мгновенной скорости привода (фиг.2 а) формирователь 20 опорного входного кода образует на своей выходной шине периодически возрастающий код 28, частота изменения которого в К раз мень- . ше частоты изменения кода 27, и следовательно, совпадает с частотой выходного напряжения преобразователя 2, а двухполюсной - и с частотой изменения углового положения ротора 29 ( Cf р ) при синхронной скорости последнего. Соответствующие пазы 27 с выхода счетчика 21 и сигналы, соответствующие коду 28 с выхода формирователя 20 опорного входного кода блока алгебраического суммирования поступают на входы блока 13 алгебраического суммирования. Последний под действием управляющих сигналов 30, поступающих с выходов измерителя 6 разности фаз, осуществляет операцию вычитания кода 27 из кода 28, в результате чего на выходе блока 13 алгебраического суммирования формируется код 31,, который в момент появления кмпульса 25 пропорционален угловому отклонению ротора от заданного положения. е-н,8-н Сигналы, соответствующие коду 31, поступают на входные шины сумматора 12, на вторые входныешины которого через блок 22 логических элементов И поступают cйгнaJп I, соответствующие коду 26, с выхода формирователя 14 входных команд постоянных запомияаюищх блоков, т.е. с выхода фазосдвигающего блока 5. Таким образом, на входах предварительной установки 14, формирователя, присоединенных к выходной вине 32 сумматора 12, к моменту прихода импульса 25 имеются сигналы, соответствующие Ц . t , что обеспечивает установку формирователя 14 входных команд постоянных запоминающих блоков в состояние , « М и дальнейшее изменение кода N уже из этого исходного положения за счет последо ательного счета импульсов с генератора 7, проходящих через логический элемент И 18 и делитель 15 частоты, с коэффициентом деления X . К Следовательно, при отставании ротора двигателя, всилу каких-либо причин, от заданного положения, определяемого сигналами, соответствующими коду 28, в момент появле-ния импульса 25 скачком изменяется (увеличен) код 26 на входах устройст 11 памяти, а значит и на управляющих входах цифровых компараторов 11, что означает изменение фазы выходных напряжений преобразователя 2, т.е. углового положения вектора магнитного поля статора двигателя. При увеличении cfp возрастет угол нагрузки двигателя, и при условии нахождения его в диапазоне синхронизации /6/S/(-Cfy/6 (5 ц, увеличивается момент на валу двигателя, вызывающий ускорение ротора, что и обеспечивает стабилизацию мгновенной скорости двигателя. Многоразрядный сигнал 30 с блока измерения разности принимает условное значение 1 при условии равенства средней скорости ротора за данной синхронной скорости, что обес печивается измерением приращения угла нагрузки двигателя и & А и 27 за период между импульсами 25, где &(,,&27 изменение сигналов, соответствующих кодам N и соответственно. Если величина & 9 , измеренная за период импульсов 25, превышает значение (для синхронно-реактивной машины IT/J ), т.е. угол нагрузки превьшает максимально допусти мое значение по условиям синхронизации, сигналы 30 на выходе блока изме рения фазы 6 изменяют свои значения дoпyctим, принимают условное значе, ние О, в структуре схемы происходят следующие изменения (фиг.2 б).. Логический элемент И 19 открывается и в момент прихода импульса 25 значения сигналов, соответствующих коду 27, переписываются на. выходы формирователя 20 опорного входного кода блока 13 алгебраического суммирования, т.е. в эти моменты N, Под действием управляющих сигналов 30 блок 13 алгебраического сумми0110рования производит сложение кодов 28 с посто янным кодом Ищ Qfn 12п , в результате чего коды 31 имеют значение M,g +NrnQm /2i , что соответствует сдвигу кода 31 относительно кода 27 на эквивалентньш угол-Q При этом также запираются логические элементы И 22 и 18, а значит с входом сумматора 12 снимаются сигналы, соответствующие коду 26, и тактовые импульсы не поступают на тактирующий вход формирователя 14 входных команд постоянных запоминающих блоков. На выходах сумматора формируются сигналы, эквивалентные коду 31 с выходов блока 13 алгебраического суммирования ( N - N ). В моменты появления импульсов 25 эти сигналы переписываются на выходы фазосдвигающего блока 26. Это вызывает формирование вектора магнитного поля статора двигателя, сдвинутого на угол if/2 по отношению к вектору магнитного поля ротора. Под воздействием максимального момента, постоянно действующего на ротор, происходит разгон электропривода до синхронной скорости W(. 2iiip-27 , при которой I 9 «5cf26()|(-l)(, где Tjy - период появления импульсов 25. При этом схема привода принимает структуру, соответствующую описанному выше режиму стабилизации мгновенной скорости. Избежать релейных переходных процессов в электроприводе при переходе к режиму стабилизации скорости удается за счет того, что цифровые сигналы, соответствукнцие коду 27, соответствующие в.момент появления импульсов 25 угловому положению ротора 29, через входы предварительной установки переписываются на выходе формирователя 20 опорного входного кода блока алгебраического сз ммирования, задающего положение ротора, т.е. N37 , чем достигается в этот момент равенство ошибки нулю. При торможении электропривода схема работает аналогично, но блок 13 алгебраического суммирования формирует код 31, вызываюпрй отставание вектора магнитного поля статора от вектора роторногй поля на угол 14 . 11 Очевидно, что переходные процесс в электроприводе под воздействием максимального пускового или тормозного моментов будут оптимальными по быстродействию. Устойчивость системы в свою очередь ; обеспечивается тем, что угол между векторами магнитных полей ротора и статора не превьшает допус
23 0 тимого диапазона синхронизации Q Таким образом, предлагаемое устройство позволяет повысить точность поддержания скорости электропривода, обеспечить его устойчивость, оптимальные по быстродействию пускотормозные режимы и представить в циф ревом виде угол нагрузки синхронного двигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство | |||
| Забойный механизм подачи | 1976 |
|
SU746079A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления синхроннымдВигАТЕлЕМ | 1979 |
|
SU851716A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
