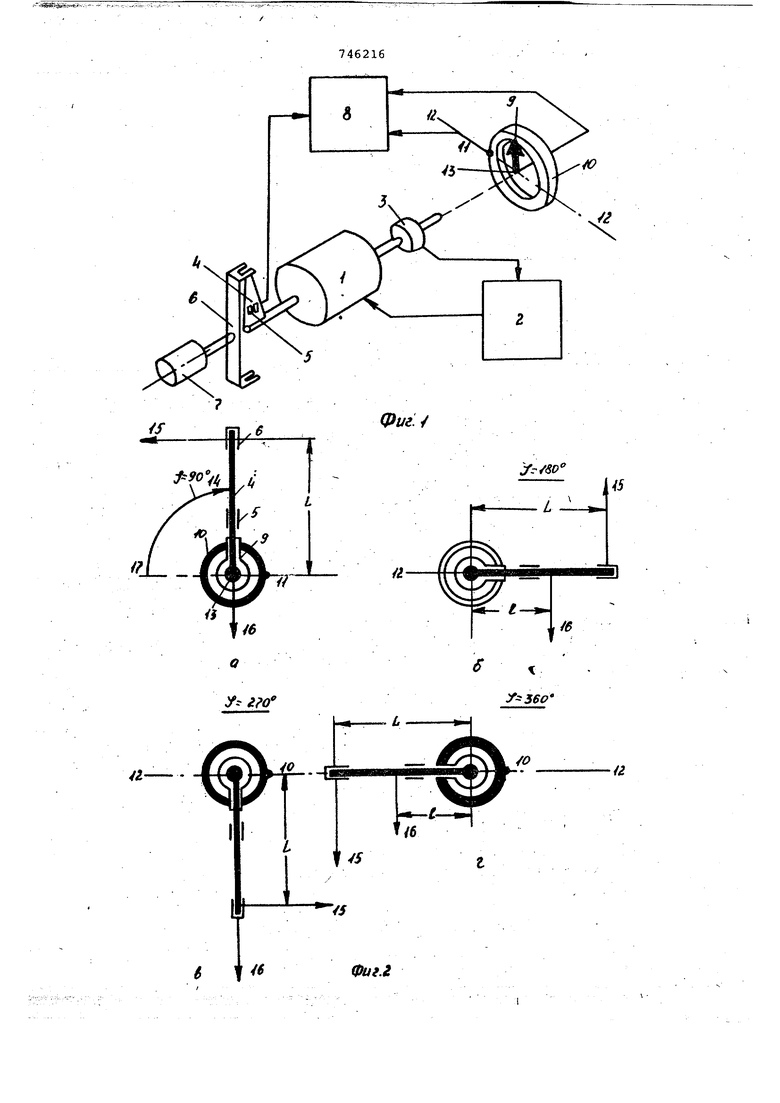
;54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА Изобретение относится к силоизмерйтельной технике и может быть использовано, например для измерения крутящего момента поворотных переключателей. Известен тензометрический динамометр для измерения крутящего момента содержащий расположенный между двумя частями скручиваемого стержня ynpyгий чувствительный элемент, выполненный в виде продольных пластин, радиально расположенных и равноудаленных от оси стержня, и тензорезисторы, не обеспечивает требуемой точности измерения 1 . Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для измерения крутящего момента, содержащее чувствительный элемент в виде упругой пластины, консольно закреп ленной на валу регулируемого электропривода и. связанной через приемную полумуфту с осью испытуемого изделия и индикатор 2 . Недостатком такого устройства является низкая точность измерения, связанная с отсутствием компенсации паразитного изгибающего момента от действия собственного веса упругой пластины. Цель изобретения - повышение точности измерения. Указанная цель.достигается тем, что в устройство введен реостат компенсации паразитного.изгибающего момента от действия собственного веса упругой пластины с непрерывным кольцевым резистивным.элементом и движком, кинематически связанным с валом электропривода и установленным с возможностью синфазного вращения с упругой пластиной, а индикатор выполнен с регулируемым нулем отсчета, причем точка отвода резистивного элемента и движок подключены ко.входу регулировки нуля отсчета индикатора. На фиг. 1 представлена структурная схема устройства; на фиг. 2 (а, б, Ь, г ) - фазовые положения элементов устройства; на фиг. 3 (а, 6 , Ь , г ) - диаграммы зависимостей параметров устройства от фазовых положений элементов устройства. Устройство для измерения крутящего момента (фиг. 1 и 2) содержит регулируемый электропривод в виде собственно электропривода 1 и регу74621fi
лируемого источника питания 2, вход которого связан с датчиком 3 угла Поворота вала электрогтривода 1. На валу электропривода 1 закреплен чувствительный элемент в виде консольной упругой пластины 4 стензорезисторами 5. Свободный конец упругой пластины 4 связан через приемную полумуфту 6 с осью испытуемого изделия 7. Тензорезисторы 5 соединены с индикатором 8 крутящего момента который выполнен с регулируемым нулем отсчета. С валом электропривода 1 кинематически связан движок 9 реостата-10 коМЙендацйй паразитного изгибающего момента от действия собственного веса упругой пластины4 имеющего непрерывный кольцевой резистивный элемент с одной точкой, отвода 11. Движок 9 реостата 10 имеет бесконечный (более 3,60°) угол поворота и установлен синфазно с упругой пластиной 4, а точка отвода 11 расположена на горизонтальной линии 12, проходящей через геометрический центр 13 кольцевого резистивного элемента реостата 10, и с той стороны по отношению к этому центру 13, с которой горизонтально ориентированная упругая пластина 4 с тензор зисторами 5 выдает (в процессе работы устройства) отрицательный по знаку сигнал погрешности.
Точка отвода 11 и движок 9 реостата 10 подключены ко входу регулировк нуля отсчета индикатора 8 крутящего момента.
На фиг. 2 (а, 5, 6 , г ) показаны некоторые фазойые положения упругой пластины 4 и движка 9 реостата 10 устройства; направление вращения 14 упругой пластины и движка; вектор силы 15, воздействующей на упругую пластину 4, как ответная реакция со стороны ведомойприемной полумуфты б вектор силы тяжести (веса) 16 упруго пластины 4, приведенный к центру тяжести этой пластины; условное начало отсчета 17 угла поворота Ч упругой пластины 4 и движка 9; плечо L силы 15 и плечо силы 16.
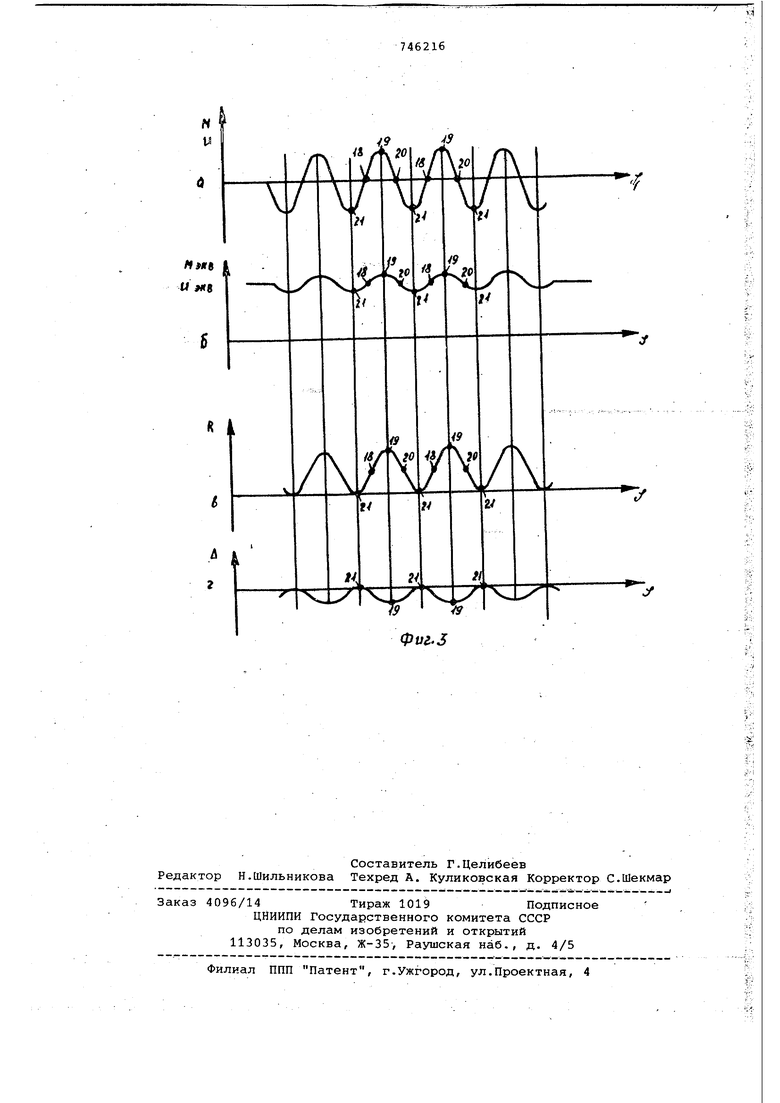
Точками 18-21 (см.фиг. 3 а, 5 , Ь , г ) показаны значения паразитного изгибающего момента М и соответствующе о ему выходного электрического сигнала U с тензорезисторов, эквивалентного момента (сумма измеряемого и паразитного момента) и соответствующего ему выходного эквивалё11тного электрического сигнала Уэкв с тензорезисторов, сопротивления R реостата и смещений л нуля Отсчета для фа13овых положений (углов поворота ) элементов, изображенных на фиг. 2 а точкой 18, на фиг. 26 точкой 19, на фиг. 2Ь точкой 20 и на фиг. 2г точкой 21.
Устройство работает следующим образом.
От регулируемого источника питания 2 на электропривод 1 подается нарастающее от нуля напряжение питания. Под действием нарастающего тока через обмотки электропривода соответственно увеличивается его крутящий момент. При достижении некоторого критического уровня крутящего момента вал электропривода 1 начинает поворачивать через упругую пластину 4 и приемную полумуфту б ось испытуемого изделия 7.
При повороте вала электропривода 1 датчик 3 угла поворота вала электропривода выдает команду регулируемому источнику 2 питания на прекращение увеличения напряжения питания электропривода 1.
При передаче крутящего момента с вала электропривода 1 на ось испытуемого изделия 7 упругая пластина 4 с тензорезисторами 5 деформируется. Степень деформации упругой пластины 4 определяется величиной передаваемого крутящего момента. В зависимости от величины крутящего момента Тензорезисторы 5 вьщают соответствующий электрический сигнал, поступающий на индикатор 8 крутящего мо-ч, мента, показывающего результат измерения.
В процессе поворота упругой пластины 4 с тензорезисторами 5 в зависимости от фазового положения упругой пластины на результат измерения влияет паразитный изгибающий момент М от действия собственного веса 16 упругой пластины 4.
На фиг. 2 (а, S ,Ь , г ) видно, что величина и знак измеряемого крутящего момента (произведение силы 15 на плечо L) имеет постоянную величину и постоянный знак, независимо от фазового положения ynpyrofi пластины 4.
Поскольку оба момента и измеряемый (постоянный по величине и знаку) и паразитный (переменный по величине и знаку) действуют на одну общую упругую пластину 4, то последняя реагирует на эквивалентный момент МэкЬ / равный алгебраической сумме ействующих моментов.
Соответственно и выходной электрический сигнал U с тензорезисторов 5 представляет собой алгебраическую сумму сигналов от каждого из моментов.
Одновременно, с поворотом упругой пластины 4 осуществляется синхронный и синфазный поворот движка 9 реостата 10.
Характер изменения сопротивления реостата от фазового положения (угла поворота Ч) движка 9 показан на иг. ЗЬ , а вызываемого им смещения д начала нуля отсчета индикатора 8 крутящего момента - на фиг. Зг .
При указанном выше конструктивном Исполнении реостата, кинематических связях его движка и соответствующей ориентацииточки отвода в процессе работы устройства обеспечивается периодическое изменение сопротивления реостата 1Q от нуля.(точка 21, фиг. ЗЬ ) при повороте его движка 9 на каждые 180. При этом максимум сопротивления соответствует каждому горизонтальному положению упругой пластины, 4, при котором сигнал от паразитного изгибающего момента вызывает максимальный подъем показаний индикатора 8 крутящего момента (точка 19, фиг.. ЗБ а минимум сопротивления (нуль) соответствует каждому другому горизонтальному положению упругой пластины при котором сигнал от паразитного изгибающего момента вызывает максимальный спад показаний индикатора (точка 21 фиг. 38 ). Максима1льное сс1противление реостата 10 подбирается такой величины, что создаваемое им смещение нуля индикатора в отрицательную сторону равно по абсолютной величине действию сигнала от паразитного.изгибающе го момента, вызывающего максимальный подъем показаний. При синхронном и синфазном пово роте движка 9 реостата 10 и уйругой пластины 4 с тензорезисторами 5 обес печивается взаимная компенсация этих обоих факторов, влияющих на показания индикатора 8 крутящего момента. Из сопоставления диаграмм, изображенных на фиг. Зса - фиг. 3 г видно, что увеличению паразитного изгибающего момента (участок 21-18-19, фиг. за ) соответйтвует увеличению эквивалентного элект4эического сигна ла USKB (участок 21-18-19, фиг. 35 которому, в свою очередь, соответст ет увеличение сопротивления реостат (участок 21-18-19, фиг. ЗЬ ), вызывающее смещение нуля индикатора 8 в отрицательную сторону (участок 21-1 фиг. Зг ) . И, наоборот, уменьшению паразитного изгибающего момента (участок 19-20-21, фиг. За ) соответствует уменьшение эквивалентного электрического сигнала , (участок 1920-21, фиг. Зб ), которому в свою очередь, соответствует уменьшение сопротивления реостата (участок 19-20-21, фиг. 3Ь ), вызывающее смещение нуля индикатора 8 в полбжительную сторону (участок 19-21, фиг. Зг ). Такое выполнение устройства позволит обеспечить независимость показаний индикатора от паразитного изгибакицего момента и, следовательно, повысить точность измерения. Формула изобретения Устройство для измерения крутящего момента, содержащее чувствитеЛьяый элемент в виде упругой пластины, консольно закрепленной на валу регулируемого электропривода и связан-ной через приемную полумуфту с осью испытуемого изделия, и индикатор, отличаю щ е е с я тем, что, с целью повышения трчности измерения, в устройство введен реостат компенсации паразитного изгибающего момента от действия собственног;о веса упругой пластины с непрерывным кольцевым резистивным элементом и движком, кинематически связанным с валом электропривода и установленным с возможностью синфазного вращения с упругой пластиной, а индикатор выполнен с регулируемым, нулем отсчета, причем точка отвода резистивного элемента и движок подключены ко входу регулировки нуля отсчета индикатора. И(Сточники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 474713, кл. G 01 L 3/JO, 1973. 2. Высоцкий А.А. Динамометрирование сельскохозяйственных машин. М., Машиностроение, 1968, с.125 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания шлифовальных кругов | 1983 |
|
SU1102665A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Устройство для определения плотности закрепления упругих тел, например, балок или пластин | 1934 |
|
SU44055A1 |
| Устройство для автоматического регулирования постоянства температур в ряде точек | 1934 |
|
SU49383A1 |
| ТЯГОВАЯ ПОВОЗКА С ЭЛЕКТРОПРИВОДОМ | 1972 |
|
SU343425A1 |
| Поршневой манометр | 1935 |
|
SU45752A1 |
| СПОСОБ ИЗМЕРЕНИЯ УПОРА И КРУТЯЩЕГО МОМЕНТА НА ГРЕБНОМ ВАЛУ СУДНА С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА | 2000 |
|
RU2169352C1 |
| Электрическое счетное устройство | 1930 |
|
SU24928A1 |
| Устройство для наблюдения растрового стереоснимка | 1982 |
|
SU1006913A1 |
| Устройство для измерения расстояний | 1985 |
|
SU1275203A1 |
/ /x/x/
w
//
v
Vvy
Фиг-Л
