Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля качества алмазных отрезных кругов.
Известен испытательный стенд, в котором испытание алмазных шлифовальных кругов осуществляется путем врезного шлифования в образце канаво| определенной глубины. Режущая способность определяется как скорость про- . резания этих канавок. Прк этом скоросгь резания определяется отношением длины нарезанной (прошлифованной) канавки к времени ее прорезания (шлифования ) 1 J.
Однако для определения скорости 5 резания необходимо произвести;измерение длины канавки, отсчет времени ее нарезания, затем вычисление. Это трудоемко и неудобно. Кроме того, в этом устройстве результат может 20 быть получен только после прорезания канавки полной длины, что связано с затратами времени.
Известно также устройство, содержащее подвижный стол с приводом по- 25 дачи, с нование и устройство для контроля скорости, включающее датчик линейных перемещений и задатчик опорного сигнала, связанные с элементом сравнения 12.30
К недостаткам этого устройства относятся конструктивная сложность преобразования сигнала, необходимость включения дифференцирующего устройства, высокочастотного генератора и 35 стабилизатора тока высокой частоты. Кроме того, дифференцирование сигнаа не обеспечивает высокой точности измерения при металлообработке, сопровождающейся случайными колебаниями Q и вибрациями.
Целью изобретения является повыение точности и упрощение устройства.
Поставленная цель достигается тем, что в устройстве, содержащем подвиж- - ный стол с приводом подачи, основание и устройство для контроля скорости, включающее датчик линейных перемещений, задатчик опорного сигнала, связанные с элементом сравнения, 50 датчик выполнен в виде потенциометра, который установлен на конце рычага, другой конец которого связан с приводом перемещения и возвратной пружиной, и на оси этого потенциометриче- 55 ского датчика укреплен ролик сцепления, взаимодействующий с подвижным столом, а также шкив, связанный через тросик .и пружину с основанием, а заатчик снабжен вторым потенциометром,60 который через предохранительную и электромагнитную муфты связан., с электроприводом опорной скорости и со вспомогательным приводом через тросик, связанный со шкивом, установленным на оси второго потенциометра, причем на указанном вьЕие ролике сцепления вырезан сегмент.
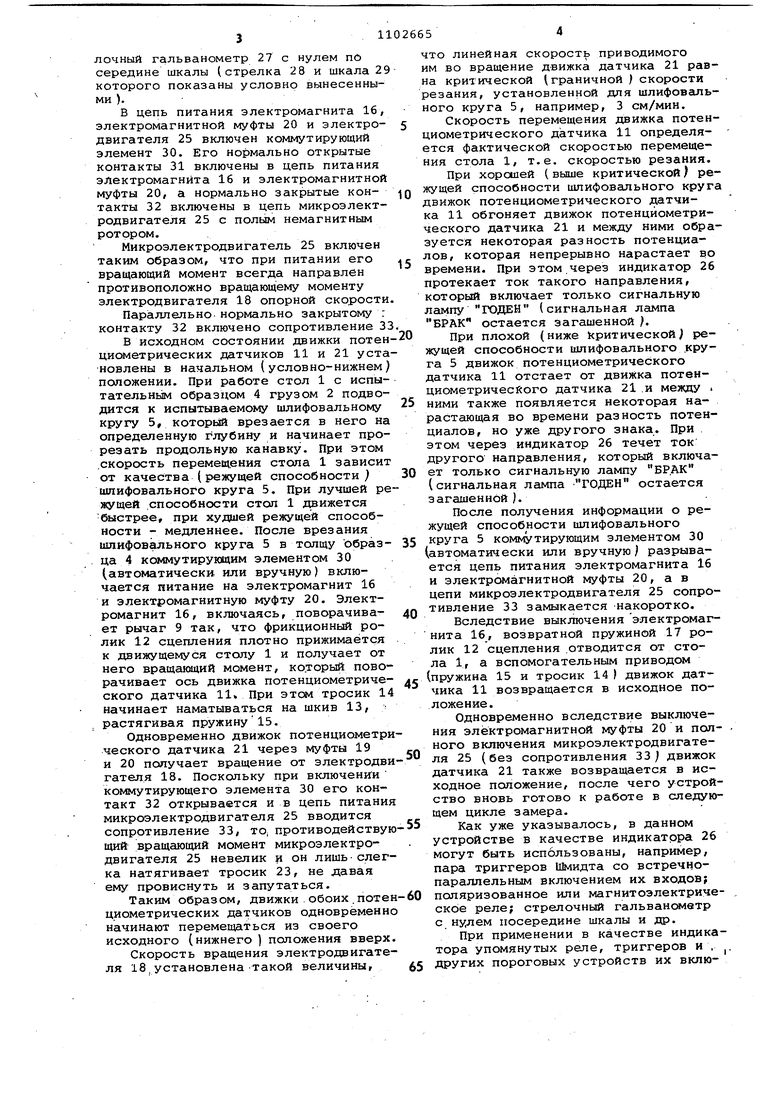
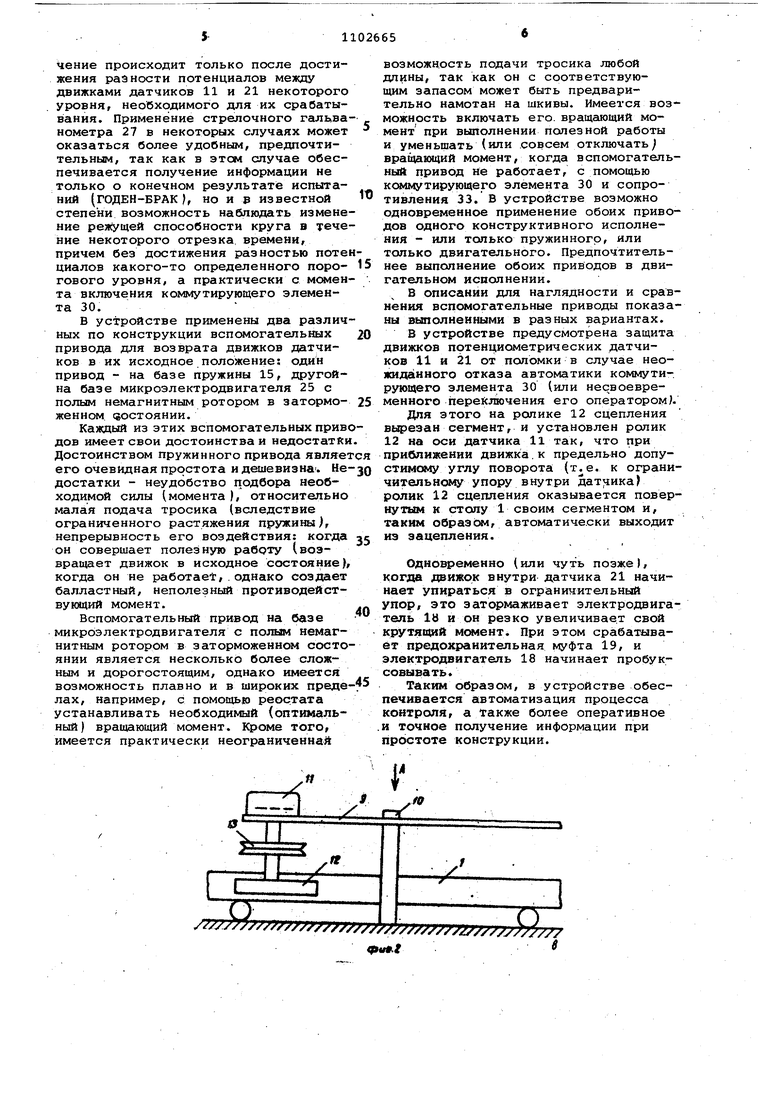
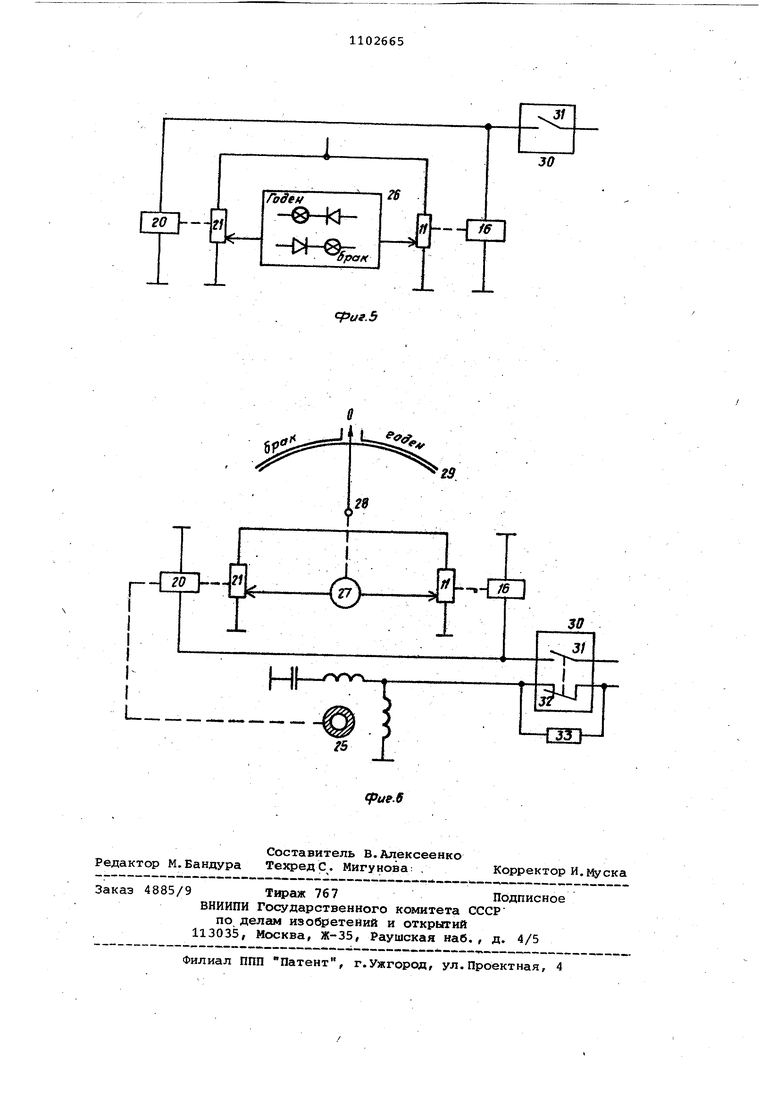
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 установка датчика; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - задатчик, общий вид; на фиг. 5 и 6 - электрическая схема, варианты.
Устройство сойрржит подвижный стол 1 с приводом подачи, состоящим из калиброванного груза 2 и тросика 3. На стопе 1 закреплен испытателный образец 4 (брусок, пластина из материала заданной твердости ). Испы.тываемый шлифовальный круг 5 снабжен электроприводом вращения 6. в состав устройства входит также контрсльноизмерительшлй блок 7.
Около подвижного стола 1 на основании 8 установлен рычаг 9 1-го рода с возможностью поворота вокруг, оси 10. На одном конце рычага 9 установлен потенциометрический датчик 11, на оси которого жестко закреплен ролик 12. сцепления, кгружная поверхность которого имеет резиновое покрытие или накатку. На ролике 12 вырезан сегмент.
На оси датчика.11 установлен шкив 13, к которому прикреплен конец тросика 14, другой конец которого прикреплен к пружине 15 растяжения, закрепление на основании 8. Пружина 15 с тросиком 14 образует первый вспомогательный привод. К другому концу рычага 9 прикреплен йкорь электромагнита 16 и возвратная пружина 17, закрепленная на основании 8
С электродвигателем 18 опорной скорости через предохранительную муфту 19 и электромагнитную муфту 20 связан второй потенциометрический датчик 21. На оси датчика 21 жестко закреплен шкив 22, к которому прикреплен конец тросика 23, другим своим концом закрепленный на шкиве 24, укрепленном на валу микроэлектродвигателя 25 с полым немагнитным ротором. Особенность этого электродвигателя состоит в том, что при подаче на его обмотки напряжений питания, его ротор можно затормозить внешней силой на любое время. При этом электродвигатель не выходит из строя (не сгорает ), а на его валу имеется статический вращающий момент, равный его номинальному вращающему моменту при вращении ротора. Микроэлектродвигатель 25 со шкивом 24 и тросиком 23 образуют второй вспомогательный привод. Движки потенциометрических датчиков 11 и 21 подключены к индикатору 26 (с сигнальными лампами ГОДЕН и БРАК). В качестве индикатора могут быть применены и другие известные устройства, например стрелочный гальванометр 27 с нулем пб середине шкалы (стрелка 28 и шкала 2 которого показаны условно вынесенными ). В цепь питания электромагнита 16, электромагнитной муфты 20 и электродвигателя 25 включен коммутирующий элемент 30. Его нормально открытые контакты 31 включены в цепь питания электромагнита 16 и электромагнитной муфты 20, а нормально закрытые контакты 32 включены в цепь микроэлектродвигателя 25 с полым немагнитным ротором. Микроэлектродвигатель 25 включен таким образом, что при питании его вращающий момент всегда направлен противоположно вращающему моменту электродвигателя 18 опорной скорости Параллельно нормально закрытому : контакту 32 включено сопротивление 3 В исходном состоянии движки потен циометрических датчиков 11 и 21 уста новлены в начальном (условно-нижнем положении. При работе стол 1 с испытательным образцом 4 грузом 2 подводится к испытываемому шлифовальному кругу 5, котор1Лй врезается в него на определенную глубину и начинает прорезать продольную канавку. При этом .скорость перемещения стопа 1 зависит от качества (режущей способностиj шлифовального круга 5. При лучшей ре жущей способности стол 1 движется быстрее, при худшей режущей способности - медленнее. После врезания шлифовального круга 5 в толщу образца 4 коммутирующим элементом 30 (автоматически или вручную) включается питание на электромагнит 16 и электромагнитную муфту 20. Электромагнит 16, включаясь, поворачивает рычаг 9 так, что фрикционный ролик 12 сцепления плотно прижимается к движущемуся столу 1 и получает от него вращающий момент, который поворачивает ось движка потенциометрического датчика 11. При этом тросик 1 начинает наматываться на шкив 13, л растягивая пружину15. Одновременно движок потенциометри ческого датчика 21 через муфты 19 и 20 получает вращение от электродви гателя 18. Поскольку при включении коммутирующего элемента 30 его контакт 32 открывается и в цепь питания микроэлектродвигателя 25 вводится сопротивление 33, то, противодействую щий вращающий момент микроэлектродвигателя 25 невелик и он лишь-слег ка натягивает тросик 23, не давая ему провиснуть и запутаться. Таким образом, движки.обоих.поте циометрических датчиков одновременн начинают перемещаться из своего исходного (нижнего ) положения вверх Скорость вращения электродвигате ля 18,установлена такой величины, что линейная скорость приводимого им во вращение движка датчика 21 равна критической граничной ) скорости резания, установленной для шлифовгшьного круга 5, например, 3 см/мин. Скорость перемещения двиАка потенциометрического датчика 11 определяется фактической скоростью перемещения стола I, т.е. скоростью резания. При хорошей (выше критической) режущей способности шлифовального круга движок потенциометрического датчика 11 обгоняет движок потенциометрического датчика 21 и между ними образуется некоторая разность потенциалов, которая непрерывно нарастает во времени. При этом через индикатор 26 протекает ток такого направления, который включает только сигнальную лампу ГОДЕН (сигнальная лампа БРАК остается загашенной К При плохой (ниже Критическойj режущей способности шлифовального круга 5 движок потенциометрического датчика 11 отстает от движка потенциометрического датчика 21 .и между ними также появляется некоторая нарастающая во времени разность потенциалов, но уже другого знака. При этом через индикатор 26 течет ток другого направления, который включает только сигнальную лампу БРАК (сигнальная лампа ГОДЕН остается загашенной ). После получения информации о режущей способности шлифовального круга 5 комкутирующим элементом 30 (автоматически или вручную) разрывается цепь питания электромагнита 16 и электромагнитной муфты 20, а в цепи микроэлектродвигателя 25 сопротивление 33 замыкается накоротко. Вследствие выключения электромагнита 16, возвратной пружиной 17 ролик 12 сцепления .отводится от стола 1, а вспомогательным приводом (пружина 15 и тросик 14 ) движок датчика 11 возвращается в исходное положение. Одновременно вследствие выключения электромагнитной муфты 20 и пол- ного включения микроэлектродвигателя 25 (без сопротивления 33) движок датчика 21 также возвращается в исходное положение, после чего устройство вновь готово к работе в следующем цикле замера. Как уже указывалось, в данном устройстве в качестве индикатрра 26 могут быть испбльзованы, например, пара триггеров со встречнопараллельным включением их входов; поляризованное или магнитоэлектрическое реле; стрелочный гальванометр с нулем посередине шкалы и др. При применении в качестве индикатора упомянутых реле, триггеров и . . других пороговых устройств их включение происходит только после достижения разности потенциалов между движками датчиков 11 и 21 некоторого уровня, необходимого для их срабатывания. Применение стрелочного гальванометра 27 в некоторых случаях может оказаться более удобным, предпочтительным, так как в этом случае обеспечивается получение информации не только о конечном результате испытаний (ГОДЕН-БРАК), но и р известной степени возможность наблюдать изменение режущей способности круга в течение некоторого отрезка времени, причем без достижения разностью потен циалов какого-то определенного порогового уровня, а практически с мтента включения коммутирующего элеменВ устройстве применены два различ ных по конструкции вспомогательных привода для возврата движков датчиков в их исходное положение: один привод - на базе пружины 15, другойна базе микроэлектродвигателя 25 с полым немагнитным ротором в заторможенном достоянии.„„„ Каждый из этих вспомогательных прив дов имеет свои достоинства и недостатки Достоинством пружинного привода являе его очевидная простота и дешевизна. He достатки - неудобство подбора необходимой силы (момента ), относительно малая подача тросика (вследствие ограниченного растяжения пружины/, непрерывность его воздействия: когда он совершает полезную работу Vвозвращает движок в исходное состояние когда он не работает,.однако создает балластный, неполезный противодействующий момент. Вспомогательный привод на базе микроэлектродвигателя с полым немагнитным ротором в заторможенном состо янии является несколько более сложным и дорогостоящим, однако имеется возможность плавно и в широких пред лах, например, е помощью реостата устанавливать необходимый (оптималь ный) вращающий момент. Кроме того, имеется практически неограниченнай озможность подачи тросика любой лины, так как он с соответствуюим запасом может быть предвариельно намотан на шкивы. Имеется возожность включать его. вращающий моент при выполнении полезной работы уменьшать (или совсем отключать ращающий момент, когда вспомогательный привод не работает, с помощью коммутирующего элемента 30 и сопротивления 33. В устройстве возможно одновременное применение обоих приводов одного конструктивного исполнения - или только пружинного, или только двигательного. Предпочтительнее выполнение обоих приводов в двигательном исполнении. Б описании для наглядности и сравнения вспомогательные приводы показаны вьтолненными в разных вариантах. В устройстве предусмотрена защита движков потенциометрических датчиков 11 и 21 от поломки в случае неожиданного отказа автоматики коммутирующего элемента 30 (или неявоевременного перелдпочения его оператором. Для этого на ролике 12 сцепления ввдезан сегмент, и установлен ролик 12 на оси датчика 11 так, что при приближении движка.к предельно допустимому углу поворота (т.е. к ограничительному упору внутри датчика ролик 12 сцепления оказывается повернутым к стопу 1 своим сегментом и, таким образ , автоматически выходит из зацепления., Одновременно (или чуть позже), когда даизкок внутри датчика 21 начинает упираться в ограничительный упор, это затормаживает электродвигатель la и он резко увеличивает свой крутящий момент. При этом срабатывает предохранительная муфта 19, и электродвигатель 18 начинает пробуксовывать. таким образом, в устройстве обеспечивается автоматизация процесса контроля, а также более оперативное .и точное получение информации при простоте конструкции.
Вид А
/
П
п
fO
/
б
IS
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Устройство для поддержания постоян-НОй СКОРОСТи РЕзАНия | 1979 |
|
SU831588A1 |
| ШЛИФОВАНИЯ ПЛОСКИХ ИЗМЕРИТЕЛЬНЫХ ПОВЕРХНОСТЕЙ ГУБОК ШТАНГЕНЦИРКУЛЕЙ | 1969 |
|
SU237625A1 |
| Потенциометрическое синхронно-следящее устройство | 1948 |
|
SU78930A1 |
| Полуавтоматический станок для шлифования фасок на малогабаритных керамических трубках и стержнях | 1950 |
|
SU89746A1 |
| Станок для шлифования торцевых поверхностей деталей | 1981 |
|
SU1116976A3 |
| Устройство для испытания механизма резания | 1986 |
|
SU1404289A1 |
| Способ зачистки осевых каналов роторов турбин и устройство для его осуществления | 1990 |
|
SU1784448A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |

дзиеЛ
-w-%
ран i r
