Изобретение относится к аппаратуре для гравиметрических измерений и может быть использовано в скважинных автоматизированных гравиметрах, а также в автоматизированных гравиметрических комплексах для донной съемки и съемки на подвижном основании.
Известен гравиметр с возвратным потенциалом, содержащий датчик положения чувствительного элемента, индикатор нуля, связанный с датчиком положения чувствительного элемента, конденсатор возвратного потенциала и вольтметр, соединенный с конденсатором возвратного потенциала. Датчик положения чувствительного элемента выполнен в виде емкостного ультрамикрометра, а индикатор нуля выполнен в виде генератора.с самовозбуждением 1.
Недостатком известного гравиметра является низкая точность измерений в условиях сейсмических помех и невозможность работы в автономном автоматическом режиме. 1
Наиболее близким техническим решением является гравиметр, содержаэий размещенный в корпусе чувствительный элемент, датчик положения
чувствительного элемента, источник напряжения и конденсатор/ неподвиж- ; ная пластина которого связана с корпусом, а подвижная - с чувствительным элементом. Датчик положения маятника выполнен в виде фотоэлектрического датчика, а индикатор нуля выполнен в виде гальванометра 2.
Недостатком известного гравимет10ра является невозможность работы в автономном автоматическом режиме в условиях сейсмических помех.
Цель изобретения - автомат.изадия измерений.
15
Поставленная цель достигается тем, что в гравиметре, содержащем размещенный в корпусе чувствительный элемент, датчик положения чувствительного элемента, источник напряже20ния и конденсатор/ неподвижная пластина которого связана с корпусом, а подвижная .- с чувствительным элементом, установлены экстремум-детекторы положительного и отрицатель25ного сигналов,, входы которых связаны с датчике положения чувствительного элемента сравнивающее устройство, соединенное с экстремум-детекторами, и регулирующий элемент, входы котороJDго связаны с источником напряжения
и с выходами сравнивающего устройства и датчика положения чувствительного элемента, а выход подключен к неподвижной пластине конденсатора.
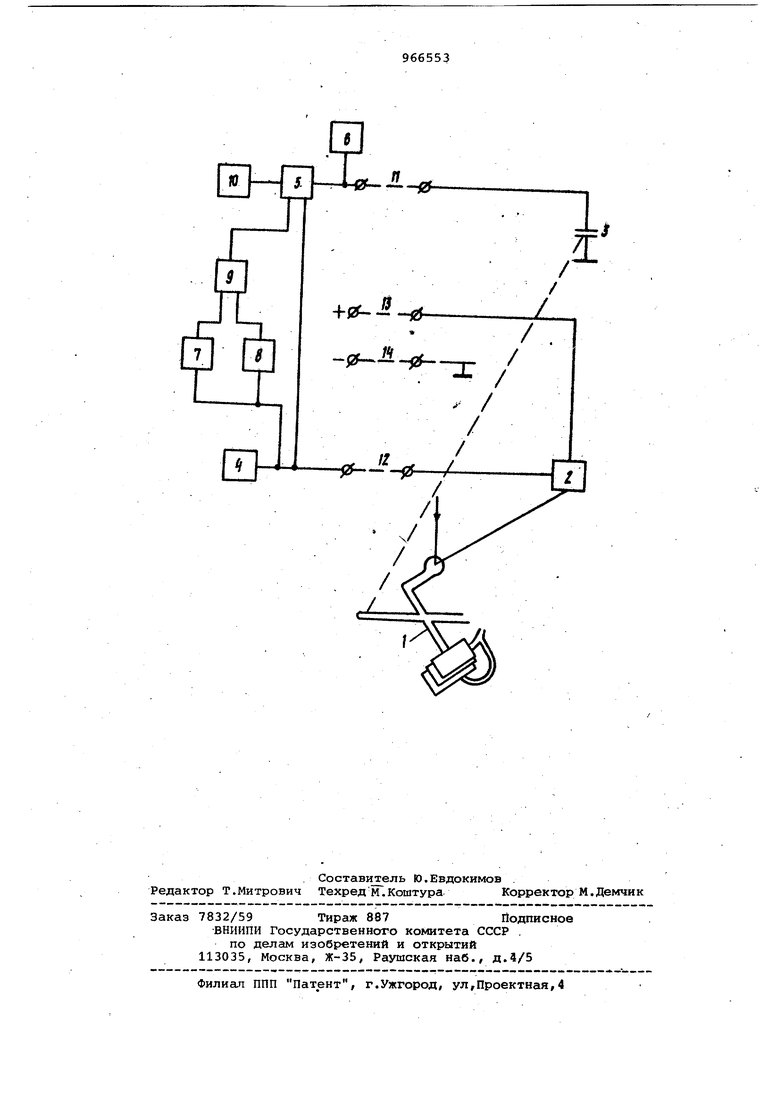
На чертеже изображена схема гравиметра .
Устройство сод ержит маятник 1 чувствительного элемента, датчик положения 2 маятника, конденсатор 3, индикатор нуля 4, регулирующий элемент 5,вольтметр б, эекстремум-детектор сигналов положительной полярности 7, экстремум-детектор сигналов отрицательной полярности 8, сравнивающее устройство 9, источник напряжения 10. Маятник 1 связан с подвижной пластиной обкладки конденсатора 3, который жилой кабеля 11 связан с вольтметром 6 и через регулирующий . элемент 5 с источником напряжения 10. Первый вход регулирующего элемента 5 соединен с выходом сравнивающего устройства 9, два входа которого соединены соответственно с выхдами экстремум-детекторов сигналов положительной полярности 7 и- отрицательной полярности 8, входы которых соединены между собой и с вторым входом регулирующего элемента 5, индикатором нуля 4 и через жилу кабеля 12 с датчиком положения 2 маятника. По жиле 13 поступает питание в гравиметр, броня кабеля 14 является общим проводом.
Устройство работает следующим образом. .
В исходном состоянии маятник 1 находится в горизонтальном положении, либо из-за сейсмических помех симметрич;но колеблется относительно горизонтального положения. Сравнивающее устройство 9 при этом вырабатывает сигнал О, запрещающий изменение напряжения на выходе регулирующего элемента 5. При увеличении силы тяжести маятник чувствительного элемента отклоняется от исходного положения, но непрерывно совершает колебания под воздействием сейсмических помех. При этом на выходе датчика положения 2 возникает переменный- сигнал положительной полярности, а на выходе сравнивающего устройства 9 - сигнал +1, поступающий на вход регулирующего элемента 5(, вследствие чего напряжение на его Ьыходе и на конденсаторе 3 начинаге уменьшаться и маятник 1 начинает приближаться к исходному положению, причем скорость изменения напряжения по мере приближения мадтника к исходному положению уменьшается, так как уменьшается сигнал, непосредственно подаваемый с датчика положения 2 -на регулирующее устройство 5. Лачиная с некоторого момента времени, сигнал на выходе датчика положения 2 становится знак
переменным. Выделение положительного и .отрицательного экстремальных сигналов, характеризующих положение маятника, осуществляется соответствующими экстремум-детекторами 7 и 8,
Равенство этих значений соответствует исходному положению маятника и на выходе сравнивающего устройства 9 возникает запрещающий сигнал О, после чего изменение напряжения на конденсаторе 3 прекращается. При уменьшении силы/тяжести на выходе датчика положения 2 возникает аналогичный сигнал отрицательной полярности, а на выходе сравнивающего устройства 9 - сигнал -1,
вследствие чего напряжение на конденсаторе 3 начинает увеличиваться и , маятник 1 начинает приближаться к исходному положению в том же режиме, как описано. После приведения чувствительного элемента в исходное положе.ние вольтметром 6 фиксируется величина напряжения на пластинах конденсатора 3, которая является мерой изменения силы тяжести.
5 Таким образом, предлагаемая автоматизация обеспечивает плавное приведение чувствительного элемента гравиметра в исходное положение в условиях воздействия сейсмической помехи. Так как такое приведение практически не зависит от величины изменения силы тяжести,. то предлагаемое устройство позволяет сократить время измерений.
Формула изобретения
Гравиметр, содержащий размещенный в корпусе чувствительный элемент, датчик положения чувствительного элемента, рсточник напряжения и конденсатор, неподвижная пластина которого связана с корпусом, а по.движная - с чувствительным элементом, о.т л и ч а ю щ и и с я тем,
с ЧТО, С целью автоматизации измерений, в нем установлены экстремумдетекторы положительного и отрицательного сигналов,, входа которых связаны с датчиком положения чувствительного элемента,сравнивающее устройство., соединнное ,с экстремум.детекторами, и регулирующий элемент/ входы которого связаны с источником напряжения и с выходами сравнивающего устройства и датчика положения
5 чувствительного элемента, а выход подключен к неподвижной пластине конденсатора.
Источники информации, принятые во внимание при экспертизе
0 1. Лукавченко П.И. Гравиметрическая разведка на нефть и газ. М., Гостоптехйздат, 1956, с.169.
2. Веселов К.Е., Сагитов М.У. Гравиметрическая разведка. П.,
5 Недра, 1968, с.186 (прототип).
У /
| название | год | авторы | номер документа |
|---|---|---|---|
| Скважинный гравиметр | 1981 |
|
SU1075213A1 |
| Автоматизированный скважинный гравиметр | 1980 |
|
SU890340A1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| Гравиметр | 1983 |
|
SU1166041A1 |
| Гравиметр | 1982 |
|
SU1117562A1 |
| Скважинный гравиметр | 1981 |
|
SU1062633A1 |
| Емкостная высокочастотная фазовая система съема информации с чувствительного элемента гравиметра | 2024 |
|
RU2829021C1 |
| Способ измерения ускорения силы тяжести | 1983 |
|
SU1221632A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ГОРИЗОНТОВ ПОЛЕЗНЫХ ИСКОПАЕМЫХ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232410C1 |
| Гравиметр для съемки в движении | 1984 |
|
SU1182465A1 |