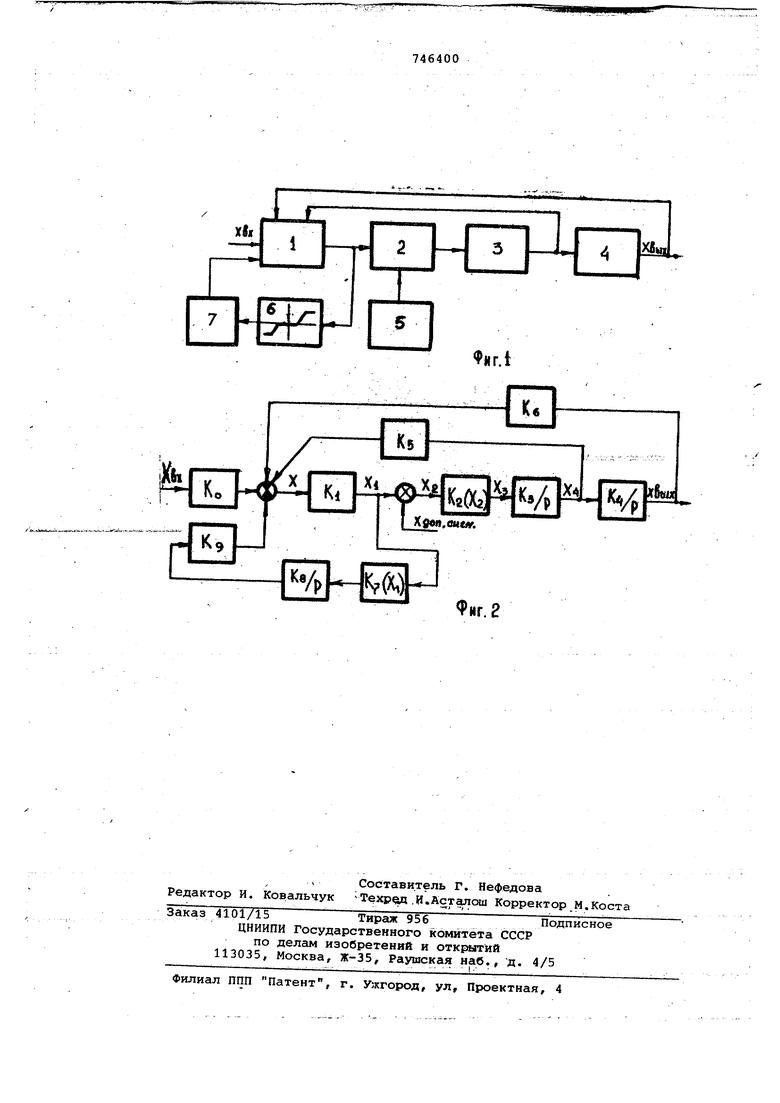
(54) ФИЛЬТР ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ Изобретение относится к технике . автоматического регулирования и направлено на повышение помехоустойчивости систем. Известны различные разновидности линейных и нелинейных фильтров низких частот, позволяющих существенно ослабить вредное влияние помех на динамические свойства систем автоматичеЬкого регулирования tl. Наиболее близко к предлагаемому устройство, состоящее из последовательно соединенных источника переменного сигнсша, суммирукядего усилителя ограничителя, первого и второго интеграторов и сумматора, второй вхо которого соединен с выходом первого интегратора, а выход - со йторым входом суммирующего усилителя-ограничителя. - Известный фильтр по сравнению с другими фильтрами низких частот позволяет существенно повысить эффективность фильтрации полезного сигн.ал от помех, близких к нему по своей ча TOTia. Однако, как по1 :азывают экспериментальные исследования, ему прису один весьма существенный недостатокуменьшение демпфирующего коэффициента с ростом амплитуды сигнала на входе нелинейного звена. Это приводит к нежелательному искажению амплитудночастотной характеристики фильтра, а при особо неблагоприятных условияхк возникновению в структуре фильтра явления скачкообразного резонанса, которое может привести к нарушению устойчивости работы всей системы автоматического регулирования в целом. Цель изобретения - повышение точности работы устройства, а также устранения возможности возникновения в структуре фильтра явления скачкообразного резонанса, существенно снижающего эффективность его практического применения в системах автоматического регулирования. Указанная цель достигается тем, что в состав фильтра дополнительно включены последовательно соединенные нелинейный элемент и третий интегратор, выход которого соединен с третьим входом сумматора, выход которого соединен со входом нелинейного элемента. На фиг. 1 представлена блок-схема фильтра; на фиг. 2 - структурная схема фильтра.
Ha блой-схёме представлены сумматор 1/ суммирующий усилитель-ограничитель 2, первый интегратор 3, второй интегратор 4, источник переменного сигнала 5, нелинейный элемент б, третий интегратор 7; -rj -vwНа структурной схеме представлены эквивалентный коэффициент К.( Х) усиления суммирующего усилителя -. ограничителя , эквивалентный коэффициент Kj ( Х) усиления нелииейного элемента, имеющего характеристику типа зоны нечувствительности с ограничением, эквивалентные коэффициенты iKj усиления, оператор Лапласа Р.
Передаточная функция предлагаемого фильтра имеет вид
К
(р)
к
к.
т
/
(p)
/K,K,K,CXi
:(P)J
i/ к,к
К - статический коэффициент перегдедачи фильтра
Т - постоянная времени фильтра; - демпфирующий коэффициент фил
тра.
Таким образом,вид передаточной функции К ip ; и выражения для статического коэффициента К и fiocтояйной време12и Т предлагаемого и известного фильтра аналогичны, демпфирующий же коэффициент предлагаемого фильтр отличается от демпфирующего коэффициента известног дополнительным слагаемым
litXiirt tC
1-%е
2 уедч
Поэтому, если в известном фильтре
демпфирующий коэффициент
с ростом
746400
амплитуды сигнала X, уменьшается (за счет уменьшения эквивалентного коэффициента усиления усилителя ограничителя .(р)Л, то в предлагаемом фильтре при надлежащем подборе . параметов дополнительного нелинейного звена типа зоны нечувствительности с ограничением К СХ, (P)J можно либо ослабить это нежелательное явление, либо даже обеспечить любой
Q желаемый характер изменения величины демпфирующего коэффициента.
Это позволит обеспечить более высокую эффективность применения предлагаемого фильтра в системах с высоким уровнем помех, близких
5 по своей частоте к полезным сигналам. При правильно выбранных параметрах нелинейного звена в предлагаемом фильтре практически исключаются возможности возникновения вредного явления скачкообразного резонайса, присущего известному фильтру. Применение данного фильтра в системах автоматического регулирования позволяет повысить их помехоустойчивость на 30-50%.
Формула изобретения Фильтр для системы автоматического регулирования, содержащий последовательно соединенные источник переменного сигнала, суммирующий усилитель-ограничитель, первый и второй интеграторы и сумматор, вто рой вход к оторОго соединей с выходом первого интегратора, а выход со вторым входом су1и1мирующего усилителя-ограничителя , отличающий с я тем, что, с целью повышения точности фильтра при высоком уровне помех и предотвращения явления скачкообразного резонанса, он содержит последовательно соединенные нелинейный элемент и третий
я интегратор, выХоД которого соединен с третьим входом сулматора, выход которого соединен со входом нелинейного элемента.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 402855, кл. G 05 В 5/-01, 1974.
2.Авторское свидетельство СССР
321797, кл, G 05 В 5/01, 08.05.70.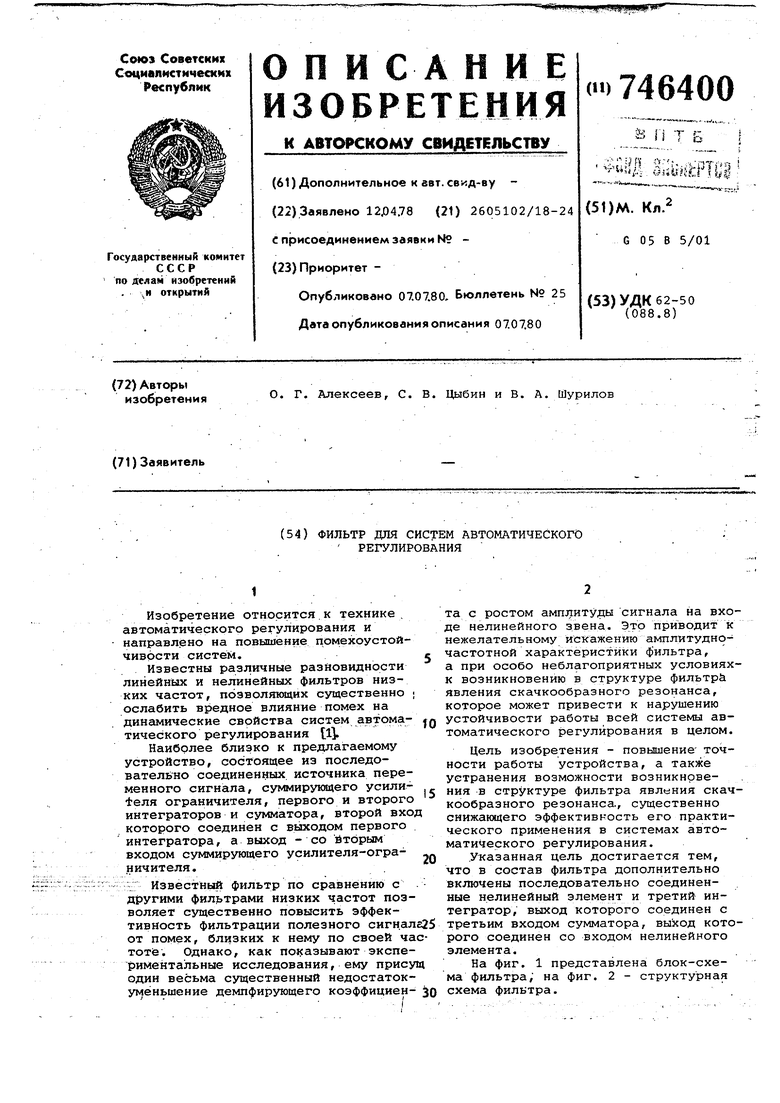
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| АНАЛОГО-ЦИФРОВОЙ ДАТЧИК НУЛЕВОГО ТОКА | 2011 |
|
RU2460134C1 |
| Устройство для определения частотных характеристик систем автоматического управления и регулирования | 1984 |
|
SU1191888A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| Фильтр для систем автоматического регулирования | 1982 |
|
SU1016770A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Демодулятор ЧМ-сигналов | 1987 |
|
SU1483592A1 |