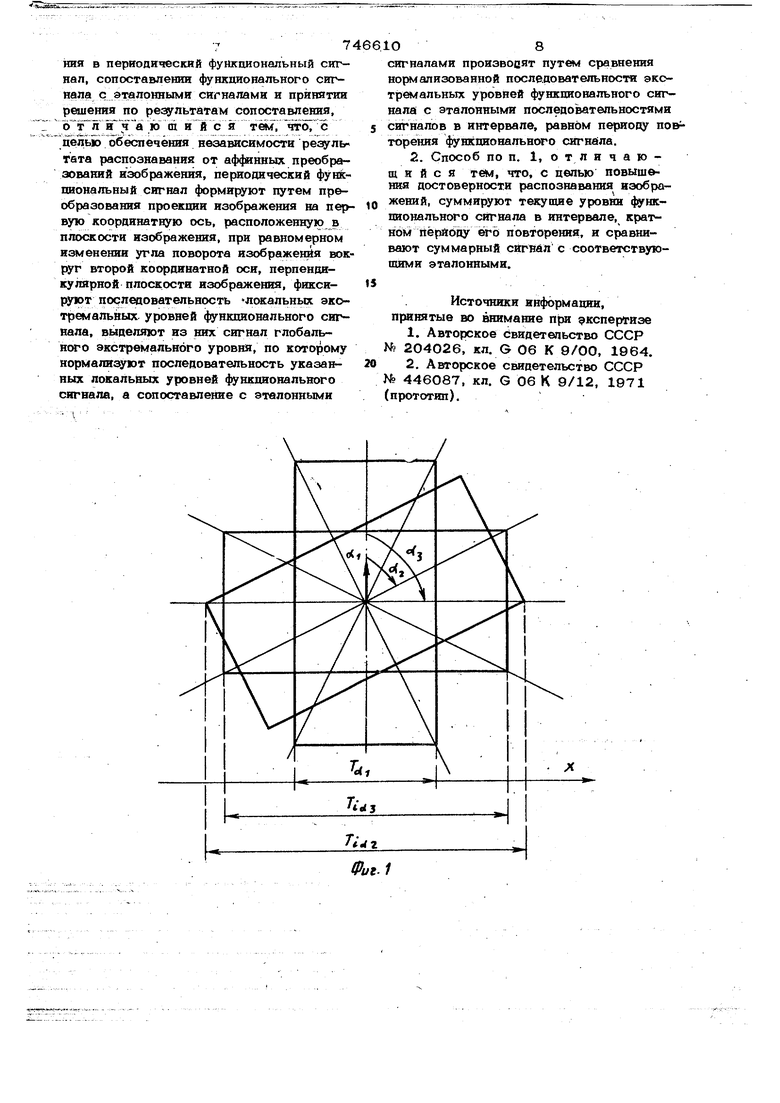
Изббретение относится к области автоматического распознавания и классифи кации изображений объектов,и может быть использовано для распознавания и классификации в реальном масштабе времени изображений произвольной сложнооти, передаваемых по каналам связи из космического пространства, морских и земных глубин, изображений электромагнитных, теловых и акустических попей, изображений объектов в биологии, медицине и т. п. Известен способ опознавания чернобелых изображений плсх:ких геометрических фигур Cl , основанный на определении общего количества черных точек отдельно в каждой строке и кажном стол це разложения независимо от координат их появления и поочередном сравнении с хранимыми в ЗУ средними (номинальными) значениями количества черньох (темных) точек, присущих данной строке (столбцу) для каждого из опознаваемых обоазов. Это способ опознавания требует использование большого количества предварительно запоминаемой, информации описывающей эталонный образ и большого количества обрабатываемой информации, что увеличивает время при опознавании изображений. Наиболее близким по технической суп ности к изобретению является способ 12 3 опознавания изображений, основанный на преобразовании изображения в периодический функциональный сигнал, сопоставлении функционального сигнала.с эталонными сигналами и принятии решения по результатам сопоставления. В известном способе после выдел&ния участка растра с опознаваемым изображением вращают считывающий растр, суммируют в направлении по кадру видеосигналы всех Строк при каждом положении считывающего раст и сравнивают суммарные сигналы с эталонными сигналами. 34 Недостатками способа являются большой объем предварительно загюмннаемрй ин4О 1ма1Ши и зависимость результатов распознавания от аффинных преобразований. Целью изобретения является обеспечение независимости результатов распоэнавания от аффинных преобразований изображения. Эта цель достигается тем, что по предложенному способу периодический функциональный сигнал формируют путем преобразований проекции изображения на первую координатную ось, расположенную в плоскости изображения, при равномерном изменении угла поворота лзображения вокруг второй координатной оси перпендикулярной плоскости изображения, фиксируют последовательность локальНых экстремальных уровней функционального сигнала, выделяют из них сигнал глобальгного экстремального уровня, по которому нормализуют последовательность указанных локальных уровней функциональгного сигнала, а сопоставление с этало ными сигналами производят путем оравнения нормализованной последовательности экстремальных уровней функционального сигнала с эталонными последовательностями сигналов в интервале, равном периоду повторения функционального сигнала Кроме того, суммируют текущие уровни функционального сигнала в интернвале, кратном периоду его повторения, и сравнивают полученный суммарный сигнал с соответствующими эталонными. Сущность изобретения поясняется чертежами. На фиг, 1 показано преобразование изображения прямоугольника в периодический функциональный сигнал; на фиг. 2зависимость периодического функциональ ного сигнала изображения от угла поворота изображения вокруг координатной оси, перпендикулярной плоскости изображения, где Ti ,., локальные экстремальные уровни функционального сигнала; на фиг, 3 приведено изображение четырехугольника ABCt);Ha фиг. 4 зависимость ) для изображения четырехугольника ABCD. Формирование периодического функционального сигнала осуществляется путем преобразования проекции изображения (фиг. 1) на первую координатную ось X расположенную в плоскости изображения, при равномерном изменении угла о( у поворота изображения вокруг вто рой координатной оси, перпендикулярной 04 плоскости изображения ( на чертеже не п казана). Как видно из фиг. 1 и 2 для каждого поворота изображения прямоугольника на угол d( jdt (j --целое число, о(5 -заданйое минимальное значение угла поворота относительно начального положения оС О уровни 1 периодического функционального сигнала (цлина-значение проекции изображения на координатную Ъсь X ) изменяются от минимального экстремального значения Т/, .(ширина стороны прямоугольника) для угла повоорота d 0 до максимальногоТ1(длина диагонали) для угла поворота э(, 63,5) и снова до минимального значения уровня Тц (длины стороны прямоугольника) для угла поворота оС 90 и т. д. Минимальные и максимальные уровни Tj.o(y периодического функционального сигнала (минимальные и максимальные значения длины проекций изображения, повернутого на углы Л d( , (уб( VCLlj E (3 - определяет количество экстремальных проекций ), дальше именуемые локальными экстремальными уровнями функционального сигнала (см. фиг. 2) периодически повторяются через каждые 180°. Из фиг. 2 видно, что периодический 4ункциональный сигнал изображения прямоугольника на фиг. 1 состоит всего из четырех (однозначно определяющих вид функционального сигнала, а вместе с этим полностью характери юших внутреннюю структуру этого изображения) периодически повторяющихся двух максимальных и двух минимальных локальных экстремальных уровней, расположенных в определенном порядке (последовательности) и на определенном друг от друга угловом расстоянии . На фиг. 3 показано изображение проиэвольного четырехугольника ABCD , показаны стороны AD и DC, диагонали АС и BD н нормали АК, НС, DP и DM, являющиеся при преобразовании изобра;|сения в периодический функциональный сигнал локальными экстремальными периодически повторяющимися уровнями функционального сигнала. Если сформировать периодический функциональный сигнал (см. фиг. 4) путе преобразования изображения в проекции 1 на первую координатную ось, расположенную в плоскости изображения, при равномерном изменений угла поворота, изображения четырехугольника АВСТ вокруг второй коорцниатной оси, перпендикулярной плоскости изображения, на нем обнаружатся располож енные в опрецеленной последовательности, периодически повторяющиеся, локальные экстремальные уровни функционального сигнала т.е. значения соответствующих сторон, диагоналей и нормалей приведенного на фиг. 3 четырехугольника ABCD. Сравнивая значения функциональных сигналов изображенных геометрически по добных фигур, можно установить, что они отличаются только величиной соответс1 вуюших локальных экстремальных Дровне сигнала, размещены же уровни на одном и том же определенном и одинаковом угловом расстоянии друг от друга. Из этого следует, что изображения, принадлежащие к одному классу f, изоб ражений и отличающееся друг от друга только коэффициентом подобия, описываются периодическими функциональными сигналами локальные экстремальные уров ни кототых размещены на одинаковом и определенном угловом расстоянии друг от друга, но различны по величине уровня для каждого периодического сигнала на величину коэффициента подобия, Для функциональных сигналов других изображений последовательность экстремальных локальных уровней также не зависит от аффинных преобразований изоб ражений, но учтено изменение формы. Следовательно, если выделить из последовательности локальных экстремальных уровней функционального сигнала гло бальный экстремальный уровень .и по не му нормализовать последовательность ук занных локальных уровней, то очевидно что изображения, принадлежащие к одном и тому же классу изображений, т.е.г отличающиеся друг от друга только значением коэффициента подобия, после нормализации их последовательностей локаль ных экстремальных уровней по соответст вующим глобальным экстремальным уров ням каждого функционального сигнала изображения из одного класса, имеют од наковые по значению нормализованные последовательности соответствующих локальных экстремальных уровней, Следс вательно, последовательности локальных экстремальных уровней функциональньи сигналов всех изображений из одного класса, которые различаются между собой только значением коэффициента подобия, можно заменить одной нормализованной последовательностью локальных экстремальных уровней для всех изображений из этого класса. Таким образом, последующие операции в предлагаемом способе заключаются в том, что фиксируют последовательность локальных экстремальных уровней функционального сигнала, выделяют из них сигнал глобального экстремального уровня, по которому нормализуют последовательность указанных локальных уровней функционального сигнала, а сопоставление с эталонными сигналами производят методом сравнения нормализованной последовательности экстремальных уровней функционального сигнала с эталонными последовательностями сигналов в интервале, равном периоду повторения функционального сигнала. Имея группу из Э эталонных значений нормализованных последовательностей экстремальных локальных уровней функциональных сигналов изображений из разных классов изображений Kt)Ki...,(где 0- число классов), и сравнивая их с полученным значением нормализованной последовательности экстремальных локальных уровней функционального сигнала распознаваемого изображения, можно однозначно идентифицировать (распознать) форму изображения независимо от аффинных преобразований изображения. Для того чтобы повысить достоверность распознавания изображений в предложенном способе, одновременно проводят дополнительные операции, заключающиеся в том, что суммируют текущие уровни функционального сигнала в интервале, кратном периоду его повторения и сравнивают полученный суммарный сигнал с соответствующими эталонными. Технико-экономический эффект от использования предложенного способа распознавания изображений состоит в том, что знач41тельно уменьщается количество необходимых эталонных локальных уровней периодического функционального сигнала для распознавания изображений, существенно упрощается сам процесс распоэнава1шя изображений, подвергнутых аффийным преобразованиям относительно эталонного изображения, вследствие чего уменьшается время распознавания сокращаются аппаратурные затраты и повышается достоверность распознавания. Формула изобретения 1. Способ распознавания изображений, основанный на преобразовании изображвния в периодический функциональный сигнал, сопоставлении функционального сигнала с эталонными сигналами и принятии решения по ре льтатам сопоставления, сГт пяГча ю са и и с я тем, что с пелью обеспечения независимости результата распознавания от аффинных преобразований изображенйя, периодический функциональный сигнал формируют путем преобразования проекции изображения на первую координатную ось, расположенную в плоскости изображения, при равномерном изменении угла поворота изображения вокруг второй координатной оси, перпендикутарной плоскости изображенш, фиксируют последовательность локальньк экстремальных, уровней функционального сигнала, выделяют из них сигнал глобального экстремального уровня, по которому нормализуют последовательность указанных локальных уровней функционального сигнала, а сопоставление с эталонными
сигналами произвовят путем сравнения нормализованной последовательности экстремальных уровней функционального сигнала с эталонными последовательностями 5 сигналов в интервале, равном периоду пов торения функционального сигнйла.
2. Способ по п. 1, о т л и ч а ю ш и и с я тем, что, с целью повышения достоверности распознавания изобра0 жений, суммируют текущие уровни функционального сигнала в интервале, кратном периоду его повторения, и сравнивают суммарный сйгнйл с соответствующими эталонными.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 204026, кл. G 06 К 9/00, 1964. 2. Авторское свидетельство СССР № 446087, кл. G 06 К 9/12, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания изображений | 1979 |
|
SU935985A2 |
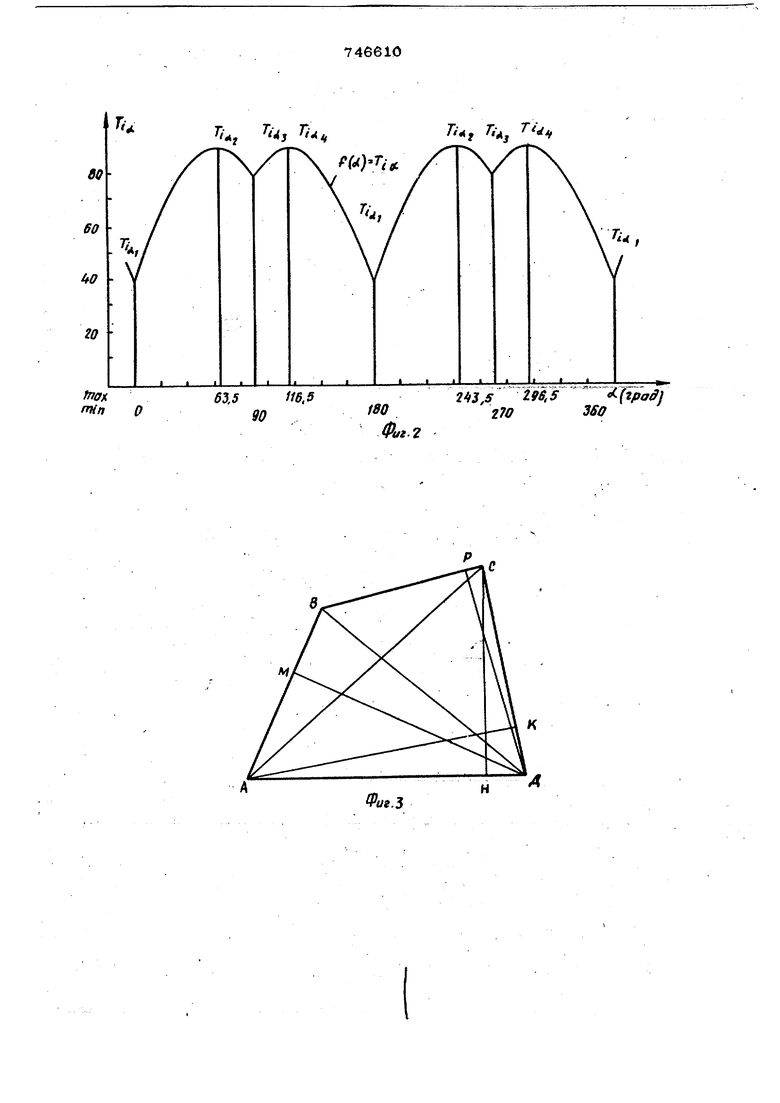
| Устройство для распознаванияизОбРАжЕНий | 1978 |
|
SU805365A1 |
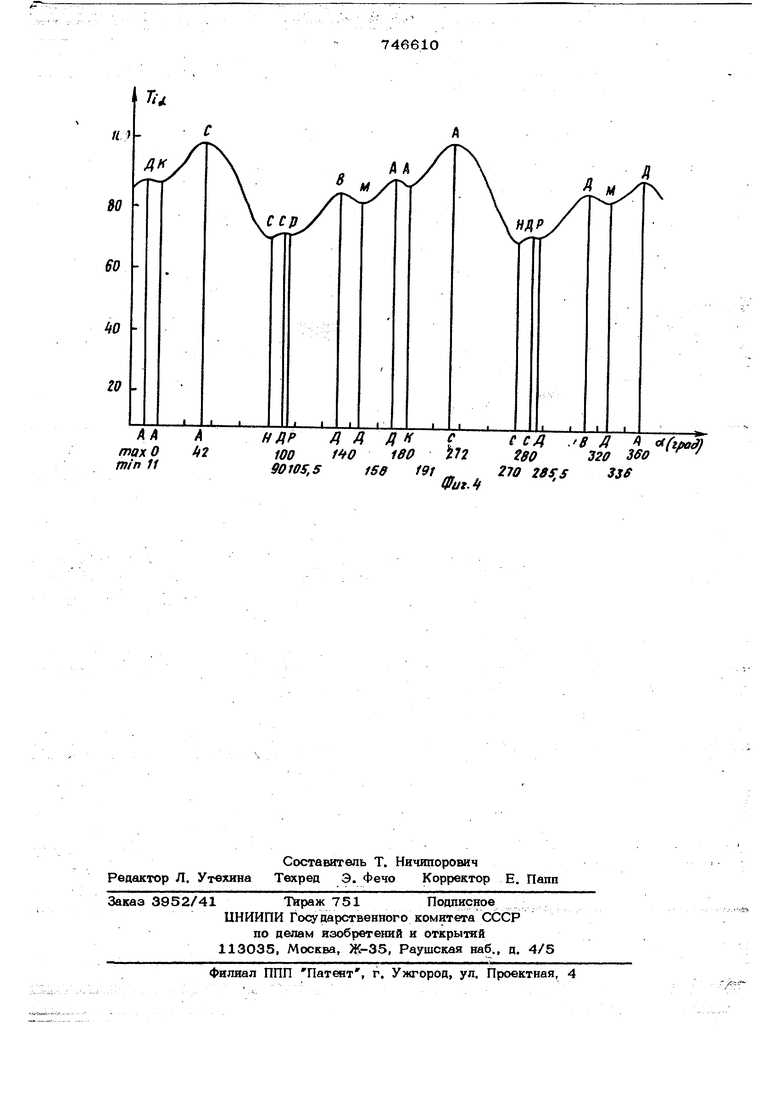
| Способ распознавания геометрических фигур | 1982 |
|
SU1020840A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2007 |
|
RU2361273C2 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| Устройство для распознавания изображений | 1983 |
|
SU1215123A1 |
| Способ распознавания геометрических фигур | 1986 |
|
SU1376109A2 |
| СПОСОБ РАСПОЗНАВАНИЯ СЛОЖНОГО ГРАФИЧЕСКОГО ОБЪЕКТА | 2005 |
|
RU2297039C2 |
| Способ выделения признаков при распознавании рисунков из электропроводящих элементов сенсорным полем | 1990 |
|
SU1709360A1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
/ 63,5116.5
в
М
Фиг.З TU, /;. Ti 2,S 196 Щград} 2703SO
80 НДР 2 100 maxO mln 11 9010S,5 Д Д flf fёсД 180 272280 iSe 191 270 28f 5 В Л (ifo 320 360
