САЭ -ч1
О)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания геометрических фигур | 1982 |
|
SU1020840A1 |
| Устройство для распознаванияизОбРАжЕНий | 1978 |
|
SU805365A1 |
| Способ распознавания изображений | 1977 |
|
SU746610A1 |
| Способ распознавания изображений | 1979 |
|
SU935985A2 |
| Устройство для распознавания изображений | 1983 |
|
SU1215123A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| Способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем | 2018 |
|
RU2694158C1 |
| Устройство для считывания символов | 1982 |
|
SU1164749A1 |
| Способ выделения признаков при распознавании изображений и устройство для его осуществления | 1982 |
|
SU1105915A1 |
Изобретение относится к автоматике и вычислительной технике и может найти применение при распознавании плоских геометрических фигур в робототехнике, установках неразрушающего контроля, анализе микробиологических препаратов. Целью изобретения является повьшение быстродействия способа. Это достигается способом распознавания геометрических фигур, основанным на сканировании и преобразовании изображения фигуры в последовательности широтно- импульсных сигналов, сканировании изображения фигуры при непрерывном изменении угла сканирования, преобразовании для каждого угла сканирования последовательности широтно- импульсных сигналов в интегральные сигналы и выделении в интегральных сигналах последовательности зкстре- мальных уровней так, что для каждого зкстремального уровня интегральных сигналов формируют сигнал временного отсчета, формируют результирующие сигналы, пропорциональные сигналам временного отсчета и обратно пропорциональные соответствующим экстремальным уровням интегральных сигналов, и по полученной последовательности результирующих сигналов судят о распознаваемой геометрической фигуре. 2 ил. с S (Л с
N)
11
Изобретение относится к автоматике и вычислительной технике и может быть использовано при распознавании плоских геометрических фигур в робототехнике, установках неразрушающего контроля, анализе микробиологических препаратов и является усовершенствованием способа по авт.св. № 1020840.
Цель изобретения - повышение быстродействия за счет введения операции нормализации последовательности экстремальных уровней.
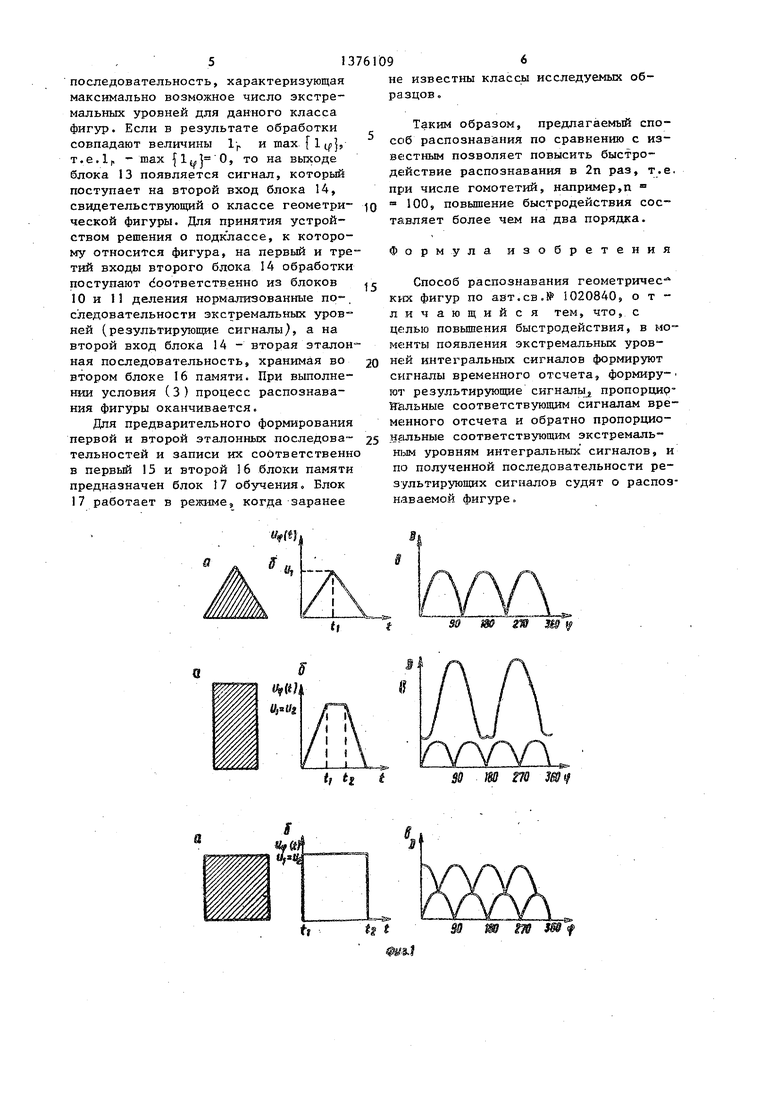
На фиг.1 приведены изображения исследуемых геометрических фигур (а), интегральные сигналы этих фигур (б),.эталонные последовательности сигналов, соответствующие распознаваемым образцам(в); на фиг.2 - блок-схема устройства, реализующего предлагаемый способ распознавания.
Сущность изобретения заключается следующем. На первом этапе процесса распознавания каждая выпуклая геометрическая фигура, которая отражается рецепторным полем, состоящим из N N элементов, описывается интегральным сигналом и (t) . Учитывая, что рецепторный элемент принимает значение единица, если он лежит внутри или пересекает контур фигуры, и нуль, если лежит извне, U(t) представляет собой распределение во времени суммы единиц в каждой строке рецепторного поля, т.е. в процессе сканирования изображения происходит преобразование последовательности широтно-импульсных сигналов в интегральный сигнал (фиг.I б/.
С целью сокращения количества информации, достаточного для однозначного описания фигуры, что приводит к дополнительному уменьшению времени на распознавание, для каждого интегрального сигнала определяют моменты времени t (фиг.1 б ), в которые меняется скорость изменения сигнала, и соответствующие им амплитудные значения уровней и и сигналов временно- го отсчета . Такая обработка сигнла U(,(t) дает возможность поставить ему в соответствие последовательность экстремальных уровней 1ц,
(Ut,,u,), (Ut,up,...,(Ut,up,
где k - число экстремальных уровней, зависящих от формы фигуры.
Для устранения зависимости экстремальных уровней, выделенных в интег
0
5
0
5
1
0
5
0
5
092
рапьных сигналах, от изменения масштаба фигур осуществляют операцию нормализации последовательности экстремальных уровней. Эта, операция производится путем деления величин U. и U, т.е. формирования отношений (U ./U :). В связи с таким представлением образца для определения глобального экстремального уровня фигуры в процессе сканирования ее изображения необходимо сформировать два интегральных сигнала, выделить в них последовательности экстремальных уровней 1 gi и ly нормализовать их, а затем сформировать из них глобальный экстремалышй уровень 1, шах tl i/ Л 1 .Так как каждому классу геометрических фигур можно поставить в соответствие только ему характерное количество максимальных экстремальных уровней 1, max HI/}, где (f 0, j °
(q количество классов фигур , то 1; однозначно задает первую эта- лонную последовательность, применяемую для предварительного распознавания . Предварительное распознавание производится на основании сравнения глобального экстремального уровня с первой эталонной последовательностью, т.е.
max f 1 д, Л 1 - max {l,} (I)
В случае, если в результате сравнения разность (1 ) равна нулю, принимается решение о классе, к которому относится исследуемая фигура.
Однако этого часто недостаточно, так как во многих практических случаях возникает необходимость в оценке не только класса, но и подкласса фигуры.
С этой целью в способ включен второй этап распознавания, заключающийся в том, что глобальный экстремаль- Hbrii уровень сравнивается с второй этгшонной последовательностью, представляющей собой множество нормализованных экстремальных уровней ()j определенных в каждом интегральном сигнале для всех направлений сканирования
tt(t/u)
Vj l,q,
(2)
Операция формирования D. производится предварительно до начала рас
познавания, например, путем практической организации процесса сканирования изображения геометрической фигуры во всех направлениях.
Важной отличительной чертой второй эталонной последовательности является отсутствие двух фигур, для которых DJ совпадают. Как следует из фиг.I в, на которых приведены вторые эталонные последовательности (резуль- тируимцие сигналы ), по их виду можно одновременно определять как класс (число нулей ), так и подкласс фигуры. Поэтому решение об окончательном распознавании принимается в результате выполнения операции сравнения
ff(u,/u),i ;;i,-D,., (3)
I (u./), r:Ur°/
при которой разность (3 ) должна быть равной нулю. Благодаря свойству лод- ной инвариантности относительно ла- раллельных переносов, пространственных поворотов, а особенно изменений масштаба исследуемых фигур глобального экстремального уровня и второй эталонной последовательности, которое достигается цутем введения операции нормализации экстремальных уровней интегральных сигналов согласно предлагаемому способу удается повысить быстродействие распознавания в 2п раз, поскольку отпадает необходимость в проведении операций вычитания и сравнения амплитудных уровней и , 1 3 также умножений U; на г.
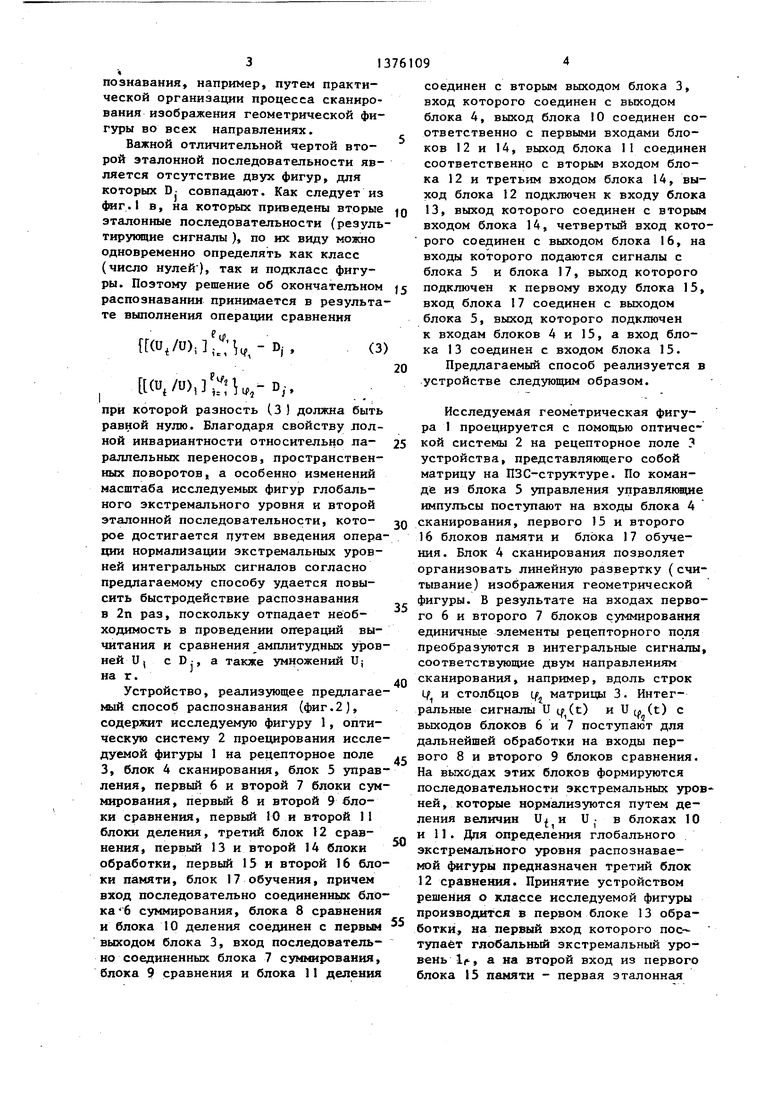
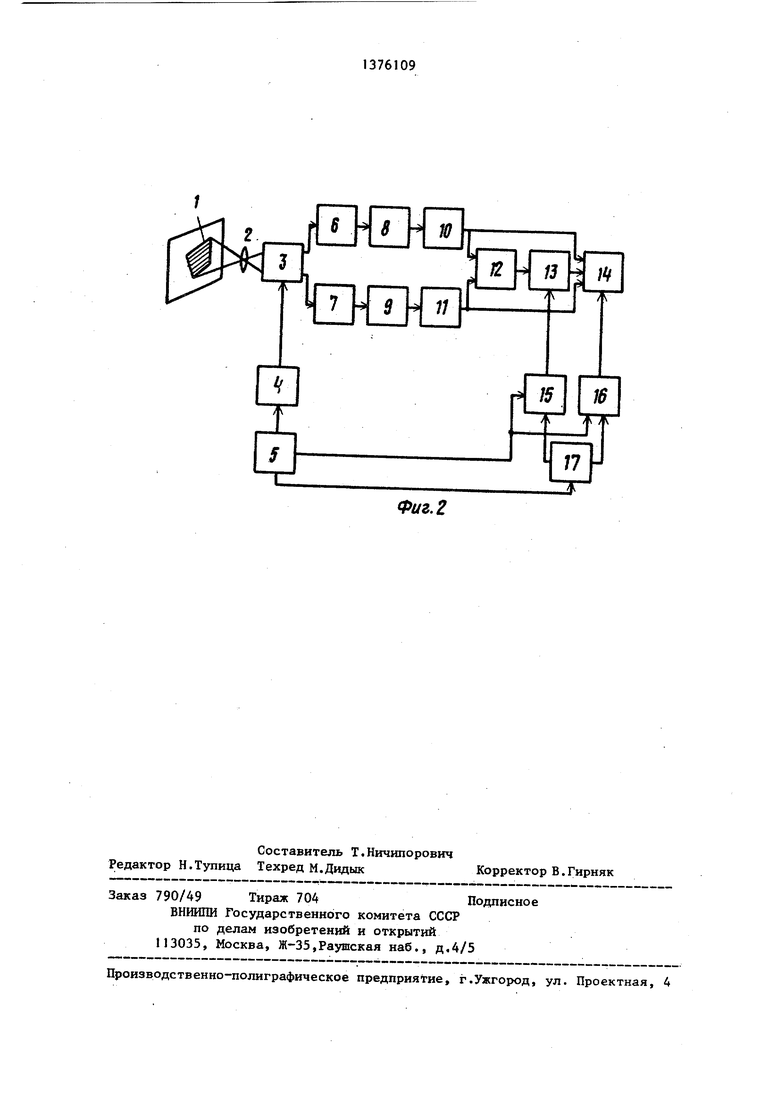
Устройство, реализующее предлагаемый способ распознавания (фиг.2), содержит исследуемую фигуру 1, оптическую систему 2 проецирования исследуемой фигуры 1 на рецепторное поле 3, блок 4 сканирования, блок 5 управления, первый 6 и второй 7 блоки суммирования, первый 8 и второй 9 блоки сравнения, первый 10 и второй 11 блоки деления, третий блок 12 сравнения, первый 13 и второй 14 блоки обработки, первый 15 и второй 16 блоки памяти, блок 17 обучения, причем вход последовательно соединенных блока 6 суммирования, блока 8 сравнения и блока 10 деления соединен с первьм выходом блока 3, вход последовательно соединенных блока 7 суммирования, блока 9 сравнения и блока 1 деления
0
5
5
0
0
5
0
соединен с вторым выходом блока 3, вход которого соединен с выходом блока 4, выход блока 10 соединен соответственно с первыми входами блоков 12 и 14, выход блока 11 соединен соответственно с вторым входом блока 12 и третьим входом блока 14, выход блока 12 подключен к входу блока 13, выход которого соединен с вторым входом блока 14, четвертый вход кото- рого соединен с выходом блока 16, на входы которого подаются сигналы с блока 5 и блока 17, выход которого подключен к первому входу блока 15, вход блока 17 соединен с выходом блока 5, выход которого подключен к входам блоков 4 и 15, а вход блока 13 соединен с входом блока 15.
Предлагаемый способ реализуется в устройстве следующим образом.
Исследуемая геометрическая фигура 1 проецируется с помощью оптической системы 2 на рецепторное поле устройства, представлянмцего собой матрицу на ПЗС-структуре. По коман- д|е из блока 5 управления управлякщие импульсы поступают на входы блока 4 сканирования, первого 15 и второго 16 блоков памяти и блока 17 обучения. Блок 4 сканирования позволяет организовать линейную развертку ( считывание) изображения геометрической фигуры. В результате на входах первого 6 и второго 7 блоков суммирования единичные элементы рецепторного поля преобразуются в интегральные сигналы, соответствующие двум направлениям сканирования, например, вдоль строк if и столбцов if матрицы 3. Интег0
ральные сигналы U if(t) и U (t) с выходов блоков 6 и 7 поступают для дальнейшей обработки на входы первого 8 и второго 9 блоков сравнения. На выходах этих блоков формируются последовательности экстремальных уровней , которые нормализуются путем деления величин в блоках 10 и 11. Для определения глобального экстремального уровня распознаваемой 4в1гуры предназначен третий блок 12 сравнения. Принятие устройством решения о классе исследуемой фигуры производится в первом блоке 13 обработки, на первый вход которого поступает глобальный экстремальный уровень 1, а на второй вход из первого блока 15 памяти - первая эталонная
Q
; if t
АААЛ
т т
Фиг. 2
| Способ распознавания геометрических фигур | 1982 |
|
SU1020840A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
