{54) УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания изображений | 1983 |
|
SU1215123A1 |
| Устройство для распознавания графических изображений | 1987 |
|
SU1508255A1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 1992 |
|
RU2101781C1 |
| Устройство для отображения информации на экране видеоконтрольного блока | 1988 |
|
SU1562954A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Устройство для отображения информации | 1987 |
|
SU1443024A1 |
| Способ распознавания геометрических фигур | 1986 |
|
SU1376109A2 |
| Устройство для отображения информации | 1980 |
|
SU943700A1 |
| Устройство для отображения информации | 1990 |
|
SU1737499A1 |
| Устройство для определения экстремальных значений | 1989 |
|
SU1615747A1 |
Изобретение относится к технической кибернетике, в частности к устройствам для распознавания изображений, и может быть использовано для распознавания плоских геометрических фигур. Известно устройство для распознавания образцов, содержащее объектив телевизионную трубку, видеоусилитель блоки кадровых и строчных ключей, распределители кадров и строк, блок триггеров, классификатор, блок измер ния координат, блок, управления, генератор линейных напряжений и коммутатор 1 . Недостатками такого устройства являются большой объем оборудования обусловленный наличием в устройстве большого количества сложных блоков; низкое быстродействие из-за использования механических перемещений передающей телевизионной трубки. ..Наиболее близким по технической сущности к предлагаемому техническому решению является устройство для распознавания изображений, содержащее оптоэлектронный матричный преобразователь, соединенный с блоком развертки изображений, первый блок памяти, адресные входы которого под ключены к выходам первого счетчика, второй блок памяти, адресные входы которого соединены с выходами блока задания адресор эталонов, а информационные выходы - с первыми входами блока принятия решений, коммутатор, одни из выходов которого подключены ко входам записи информации второго блока памяти, блок синхронизации и управления, соединенный с соответствующими входами оптоэлектронного матричного преобразователя, счетчика и блока задания адресов эталонов, и ключи 2, Недостатки известного устройства зависимость результата распознавания от аффинных преобразований изображ ння (параллельного переноса, враиьения и подобия) ; малая достоверность распознавания; Цель нэобретения - обеспечение чеэаеисимости результата распознавания от аффинных преобразований изображений. Указанная цель достигается тем, что устройство содержит блок сравнения экстремальных значений вектора развертки изображения, регистр хранения глобального значения вектора раэверткн изображения, блок нормализации -и второй счетчик, разрядные выходы которого подключены соответственно к управляющим входам блока развёртки изображения и через ключи ко входам первого- блока памяти-, выходы KOTOpoio .соединены с одними из входов коммутатора и блока нормализации, другие входы которого подключены к информационным выходам регистра хранения глобального значения вектора развертки изображения, управляющий и информационный входы которого соединены соответственно с. первым управляющим и одними из информационных выходов блока сравнения экстремальных значений вектора развертки изображения, второй управляющий выход которого подключен к одному из входов первого счетчика и к упраляющим входам ключей, счетный вход и выход переполнения второго счетчика соединены с соответствующим выходом и входом блока синхронизации и управления, причем выходы блок.а нормализации подключены к другим входам коммутатора, другие выходы которого соединены со вторыми информационными входами блока принятия решений, третьи информационные входы которого подключены к выходам блока задания адресов эталонов, а информационные входы первого блока памяти родключены к , информационным выходам блока сравнения экстремальных значений вектор развертки изображения. .
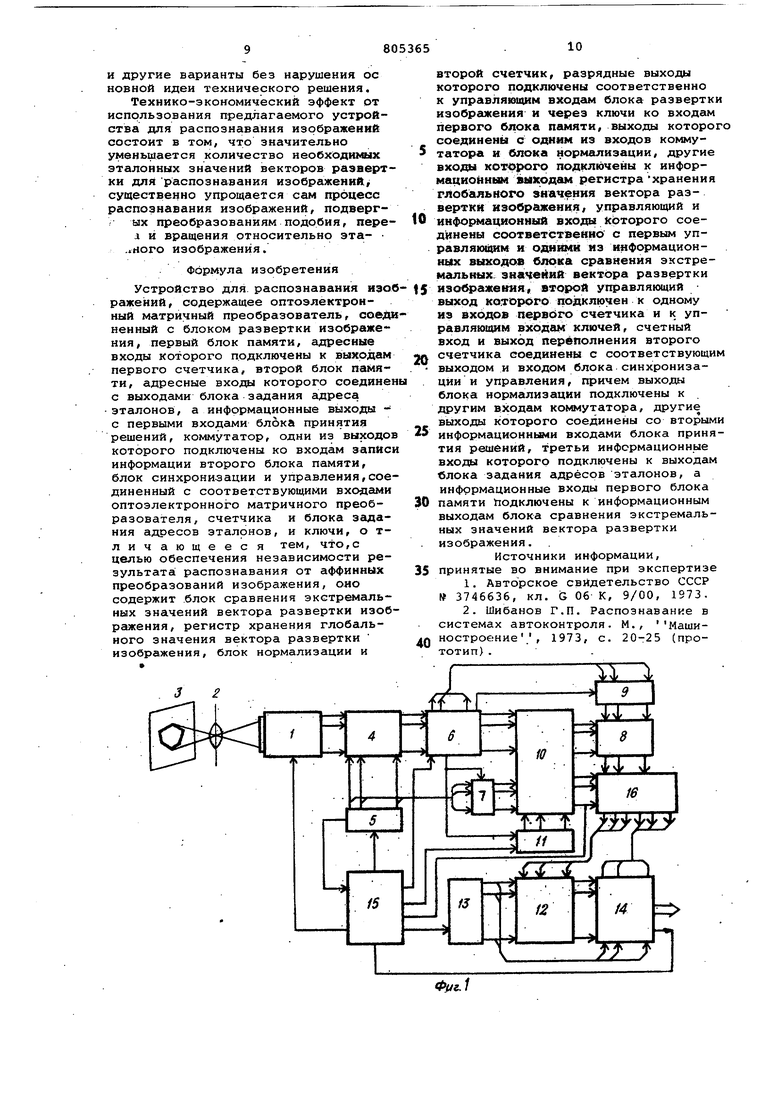
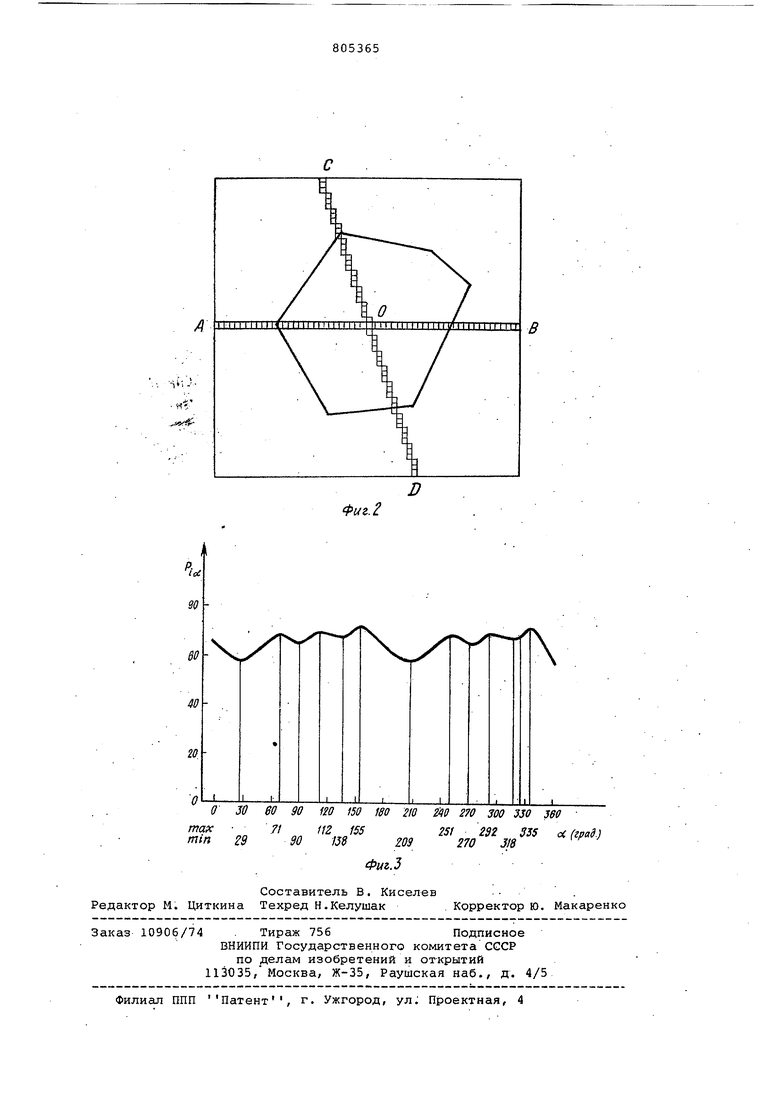
На фиг. 1 представлена блоксхема предлагаемого устройства; на фиг. 2- способ развертки; на-фиг.3 функциональный сигнал изображения.
Устройство содержит, оптоэлектронный матричный преобразо.ватель 1, на входе которого .установлена оптическая система 2, позволяющая спроектировать изображение плоской фигуры с носителя 3 информации на фоточувствительную поверхность преобразователя 1, блок 4 развертки изображения, счетчик 5 (для фиксации угла поворота изображения),блок б сравнения экстремальных значений вектора развертки изображения, ключи -, блок 8 нормализации, регистр 9 хранения глобального значения вектора развертки изображения, .первый блок 10 памяти, счетчик 11 (адреса), второй блок 12 памяти (для хранения кодов эталонов),блок
13задания адресов эталонов, блок
14принятия решений и блок 15 синхронизации и управления, коммутатор 16. .
Оптоэлектронный.матричный преобразователь 1 предназначен .для фотоэлектрического преобра.вования изображения геометрической фигуры, спроектированной на его фотсзчувствительную поверхность, в совокупность
электрических сигналов уровня .черного и уровня белого. Блок 4 развертки изображения служит для развертки изображения по строкам (векторам) в полярной системе координат. На выходе блока 4 раз-вертки изображения формируется цифровой код, соответствующий длине вектора, т.е. величине отрезка, расположённого внутри гэаспознаваемой геометрической фигуры и поворачиваемого вокруг геометрического центра -и.зображения.
Блок 4 развертки изображения является логическим комбинаторным блоком, обеспечивающим считывание необход.имой строки элементов оптоэлектронного матричного преобразователя 1, образующей так называемый вектор развертки изображения, расположенный под определенным углом относительно начального вектора развертки изображения.
Счетчик 5 предназначен для задания двоичного кода угла поворота вектора развёртки вокруг геометрического центра изображения.
Блок 6 сравнения экстремальных значений вектора развертки изображения служит для определения в последовательности текущих значений вектора развертки локальных и глобального экстремальных уровней при повороте вектора развертки изображения на угол, кратный ISC.
Ключи 7 предназначены для записи в блок 10 памяти значения текущего двоичного кода угла поворота вектора развертки изображения при достижении, вектором развертки изображения очередного экстремального значения.
Блок 8 нормализации предназначен для деления выделенных блоком 6 экстремальных значений вектора развертки изображения на величину глобального экстремального значения ве-ктора развертки, зафиксированную в регистре 9. .
БЛОК 10 памяти обеспечивает хранение кодов величин экстремальных значений вектора развертки изображения и соответствующих им кодов величин углов поворота вектора развертки изображения.
Запись в запоминающие ячейки блока 10 указанных кодов величин экстремальных значений вектора развертки производится по .адресу,формируемому счетчиком 11/ который в режиме записи фиксирует количество экстремальных значений вектора развертки, поступающих с блока б сравнения экстремальных значений вектора развертки.
В режиме считывания счетчик 11 формирует код адреса по управляющим импульсам, поступающим с блока 15 инхронизации и управления, В блоке
12 памяти записаны последовательности кодов нормализованных экстремальных значений вектора развертки и соответствующих им углов для различных классов геометрических фигур Считывание этих кодов при распознавании осуществляется блоком 13 задания адресов эталонов.
Блок 14 принятия решений, на входы которого в режиме распознавания поступают параллельные коды нормализованных экстремальных значений вектора развертки и соответ- . ствующих им углов с блока 10 памяти параллельные коды эталонов с блока 12 и двоичйый код класса изображени с блока 13 Зсщания адресов эталонов предназначен для сравнения распознаваемых и эталонных величин и определения класса распознанного изображения .
Блок 15 синхронизации и управлен служит для обеспечения согласованной во времени работы всех блоков и узлов устройства.
Коммутатор 16 предназначен для распределения нормализованных экстрмальных значений вектора развертки и соответствующих им значений углов поворота этого вектора в блок 14 принятия реше-ний при работе устройсва в режиме распознавания изображений или Б блок 12 памяти в случае работы устройства в режиме обучения или записи эталонов.
В режиме обучения устройству предъявляются стандартные изображения геометрических фигур и выделяются информационные признаки фигуры (локальные и глобальные экстремальные значения вектора развертки изображения).
Рассмотрим формирование экстремальных значений векторов развертки для плоской фигуры (фиг. 2), где обозначены: О - геометрический центр фигуры, АОВ - начальный вектор (строка) развертки изображения, СОД - промежуточный (текущий) вектор развертки изображения, соответствующий некоторому углу поворота вектора СОВ.
При равномерном вращении и считывании длины вектора изображения формируется некоторая функциональная зависимость (с.},где Р),текущее значение длины вектора,
соответствующий угол поворота Для полученной кривой можно выделить совокупность экстремальных уровней с соотв-ётствующимй углами ОС, однозначно характеризующих клас Р4 спознаваемой.фигуры;
В режиме обучения устройство работает следующим образом.
До начала расчитывания изображения фигуры блоки и узлы устройства установлены .с помощью блока 15 синхронизации и управления импульсом
установки в О в исходное состояние.
Преобразование изображения геометрической фигуры в периодическую последовательность значений векто, ров развертки.начинается по команде Пуск , поступающей с блока 15 синхронизации и упргшления на оптоэлектронный матричный преобразователь 1, счетчик 5, блок 6 сравнения экстремальных значений векторов развертки и на другие блоки и узлы устройства. После этого на фоточувствительную поверхность оптоэлектронного матричного преобразователя 1 с носителя 3 информации с помощью
5 оптической системы 2 проектируется плоское изображение распознаваемой геометрйч еской фигуры.
Оптоэлектронный матричный преобразователь 1 преобразует изображение геометрической фигуры, спроек тироваиной на его фоточувствительную поверхность, в совокупность электрических сигналов уровня черного и уровня белого. С блока
5 15 синхронизации И управления на счетный вход счетчика 5 (угла поворота) через определенные промежутки времени поступают управляющие импульсы, количество которых равно колип честву дискретных углов поворота векторов развертки. С разрядных выходов счетчика 5 код определенного угла поворота вектора развертки подается на -управляющие входы блока 4 развертки изображения и в блок
5 10 памяти через ключи 7,которые открываются импульсом из блока б при условии наличия соответствующей для данного угла поворота вектора развертки экстремальной длины (величиньЦ
0 этого вектора.
С помощью Логического комбинаторного блока 4 развертки изображения обеспечивается считывание необходимой строки элементов матричного
г преобразователя 1, образующей вектор развертки под определенным углом относительно начального .вектора, развертки изображения.
0 С выхода блока 4 суммарное значение сигнала уровня чёрного с соответствующей строки элементов матричного преобразователя 1 подается на информационные входы блока 6
. сравнения экстремальной длины (величины) векторов развертки. Затем с блока 15 синхронизации и управления на счетный вход счетчика 5 поступает следующий импульс, а с его разрядных выходов на управляющие
0 входы бяока 4 развертки изображения и через ключи 7 в блок 10 памяти в параллелы4Ьм коде поступает сигнал следующего угл поворота вектора развертки для выбора следующей строки элементов матричного преобразователя 1, повернутой относительно предыдущей (начальной) на некоторы фиксированный угол оС, например, i - З. 3 блоке 6 сравнения экстремальн значений вектора развертки текущие значения этих величин, т.е. значен суммарного количества, например, ч ных элементов в каждой строке считанной блоком 4 развертки изображе с оптоэлектронного матричного пр образователя 1, заносятся на вр менное хранение в регистры (на фиг. 1 не изображены), содержимое которых сравнивается между собой, т.е. текущее значение величины вектора развертки сравнивает ся с предыдущим и последующим значением,, и если оно больше их (или меньше) по величине, то оно запоминается. Это выделенное экстремальное значение заносится снова с следующиЙ один из регистров хранения экстремальных величин и в блок 10 памяти по адресу, задаваемому счетчиком и, который управляется сигна лом о выделении экстремального значения, поступающим из блока 6. Одно временно этот же сигнал поступает на управляющий вход ключей 7, откры вая иу, и код угла поворота этого вектора развертки заносится в блок 10 памяти по соответствующему адресу. Кроме того, в блоке 6 сравнения экстремальных значений вектора развертки содержимое регистров хранения этих экстремальных значений (величин) сравнивается между собой, и глобальное значение величины вектора развертки заносится в регистр 9 хранения глобального значения вектора развертки, При повороте векторов развертк на угол, равный 180, т.е. при окончании развертки изображения (считывания строк элементов матрич ного преобразователя I), с выхода переполнения счетчика 5 импульс переполнения поступает на вхвд блока 15 синхронизации и управления, сигнализируя об окончании процесса накопления информационных признаков для предъявляемой фигуры (фиг. 2 и фиг. 3). Одновременно с этим в блок 13 задания адресов эталонов заносится код, соответствующий начальному адресу информационного массива для данной геометрической фигуры. В режиме распознавания устройст предъявляют изображение геометрической фигуры и записывают в блок 10 памяти экстремальные значения вектора развертки изображения и со ветствующие им значения углов поворота. Одновременно с этим в регистре 9 запоминается глобальное значение вектора развертки изображеьия. По сигналу переполнения со счетчика 5 блок 15 синхронизации и управления подает на счетчик 11 управляющие импульсы, по которым формируется код адреса. По адресу, выбранному Счетчиком 11 адреса, экстремальные значения векторов развертки поступают с блока 10 оперативной памяти в блок 8 нормализации, а соответствующие экстремальным значениям векторов развертки значения углов поворота этих векторов поступают с блока 10 оперативной памяти на входы коммутатора 16. Одновременно с регистра 9 хранения глобального экстремального значения вектора развертки изображения в блок 8 нормализации подается значение глобального экстремального вектора развертки и по команде из блока 15 синхронизации и управления в блоке 8 нормализации происходит нормализация экстремальных значений векторов развертки поступающих из блока 10 оперативной памяти. После этого на управляющий вход коммутатора 16 с блока 15 синхронизации и управления поступает управляющий сигнал, и нормализованные экстремальные значения векторов развертки и соответствующие им значения углов поворота вектора поступают в блок 14 принятия решений. При этом с блока 15 синхронизации и управления на блок 13 задания адресов эталонов поступает управляющий сигнал, и с его выхода в блок 12 памяти эталонов и в блок 14 Принятия решения поступает двоичный код класса изображения. Кроме этого, в блок 14 принятия решения поступают параллельные коды нормализованных экстремальных значений векторов развертки и соответствующих им значений углов поворота вектора с блока 12 памяти эталонов. В блоке 14 принятия решений происходит сравнение распознаваемых и эталонных величин и определяется класс распознанного изображения. В случае несовпадения распознаваемых и эталонных величин для данного класса изображений из блока 14 принятия решений в блок 15 синхронизации и управления поступает сигнал, по которому в блок 13 выборки эталонов поступает следующий управляющий сигнал выборки эталонов следующего класса, и процесс сравнения кодов величин повторяется до тех пор, пока не произойдет сравнение распознаваемых величин и эталонных для соответствующего класса изображений. Изложенные примеры не исчерпывают всех случаев применения изображения, а являются лишь его иллюстрацией. На практике могут быть использованы и другие варианты без нарушения ос новной идеи технического решения. Технико-экономич(еский эффект от использования предлагаемого устройства для распознавания изображений состоит в том, что значительно уменьшается количество необходимых эталонных значений векторов разверт ки для распознавания изображений, существенно упрощается сам процесс распознавания изображений, подвергых преобразованиям подобия, пере л и вращения относительно эта- ..rioro изображения. Формула изобретения Устройство для распознавания иэо ражений, содержащее оптоэлектронный матричный преобразователь, соед ненный с блоком развертки изображения, первый блок памяти, адресные входы которого подключены к выходам первого счетчика, второй блок памяти, адресные входы которого соедине с выходами блока задания адреса эталонов, а информационные выходы с первыми входами блока принятия решений, коммутатор, одни из выходо которого подключены ко входам запис информации второго блока памяти, блок синхронизации и управления,сое диненный с соответствующими входами оптоэлектронного матричного преобразователя, счетчика и блока задания адресов эталонов, и ключи, о тличающееся тем, что,с целью обеспечения независимости результата: распознавания от аффинных преобразований изображения, оно содержит блок сравнения экстремальных значений вектора развертки изоб ражения, регистр хранения глобального значения вектора развертки изображения, блок нормализации и
а
1/ У второй счетчик, разрядные выходы которого подключены соответственно к управляющим входам блока развертки изображения и через ключи ко входам первого блока памяти, выходы которого соединены с одним из входов коммутатора и блока нормализации, другие входы которого подключены к информационным iuixoAaM регистра хранения глобального значения вектора развертки изображения, управляющий и информационный входы кЬторого соединены соответственно с первым управляюи(им и одними из и«формационнь1х выходов блока сравнения экстремальных эаачейий вектора развертки изосЦражения, второй управляющий выход которого подключен к одному из входов первого счетчика и к управляющим входам ключей, счетный вход и выход переполнения второго счетчика соединены с соответствующим выходом и входом блока синхронизации и управления, причем выходы блока нормализации подключены к другим входам коммутатора, другие выходы которого соединены со вторыми информационными входами блока принятия решений, третьи информационные входы которого подключены к выходам блока задания адресов эталонов, а информационные входы первого блока памяти Подключены к информационным выходам блока сравнения экстремальных значений вектора развертки изображения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 3746636, кл. G 06 К, 9/00, 1973. 2.Шибанов г.П. Распознавание в системах автоконтроля. М., машиностроение., 1973, с. 20-25 (прототип) .
Л
.-. н-;
„i«
60
