1
Изобретение относится к электротехнике и может быть использовано при создании электроприводов и систем автоматического регулирования на базе электрических машин с полупроводниковой коммутацией.
Известен электропривод с ся-снхронным двигателем, в котором регулирование угла между векторами осуществляют с помощью датчика положения а
Его применение увеличивает весогабаритные характеристики и усложняет конструкцию электрических МЕваган и схему управления.
Известен электропривод, содержаний синхронный двигатель, датчик положения ротора, гистерезисную машину и синхронную муфту, позволяющую в некотором диапазоне регулировать угол 0 2 .
Такой электропровод сложен по конструкции и область его применения ограничена.
Наиболее близким техническим решением к данному электроприводу является электропривод, содержащий синхронный двигатель, подключенный к прео азователю частоты, датчик положения ротора двигателя с синусным и косинусным выходами, генератор синусоидального напряжения, выход которого подключен к первым входам демодулятора, к входу датчи5 ка положения ротора и к первому входу функционального преобразования с синусным и косинусным выходами, а выхода демодуляторов подключены к управляющим входам пребраэоватёля
® частоты ЕЗ,
Недостатком этого устройства является отсутствие, возможности регулировки угла 9 , что сужает область применения привода,
5 Целью изобретения является расширение функциональных возможностей привода.
Это достигается тем, что в электропривод, содержащий синхронный двигатель, подключенный к преобразователй частоты, датчикположения ротора Двигателя, имеющим синусный и косинусный выходы, генератор синусоидального напряжения, выход которого
25 подключен к первым входам демодуляторов, к входу датчика положения ротора и к первому входу функционального преобразователя с синусным и косинусным выходами, а выходы де3( модуляторов подключены к управляющим
входам преобразователя частоты, введены четыре регулятора амплитуды, эадатчик угла между векторами напряжения и ЭДС возбуждения синхронного двигателя, причем первые входа первого, четвертого и второго, третьего регуляторов амплитуды соответст-. венно подключены к косинусному и синусному выходам датчика положения ротора, 3 втсрые входы пе эвого третьего,и инвертирующего второго, четвертого регуляторов амплитуды подключены соотв,е ственно к косинусному и синусному выходам функционального преобразователя, второй вход которого соединен с задатчиком угла, выходы первого, второго и третьего, четвертого регуляторов алшлитуда подключены соответственно к первому и второкс сумматорам, выходы которых; соединены с вторыми входами демодулято1 ов.
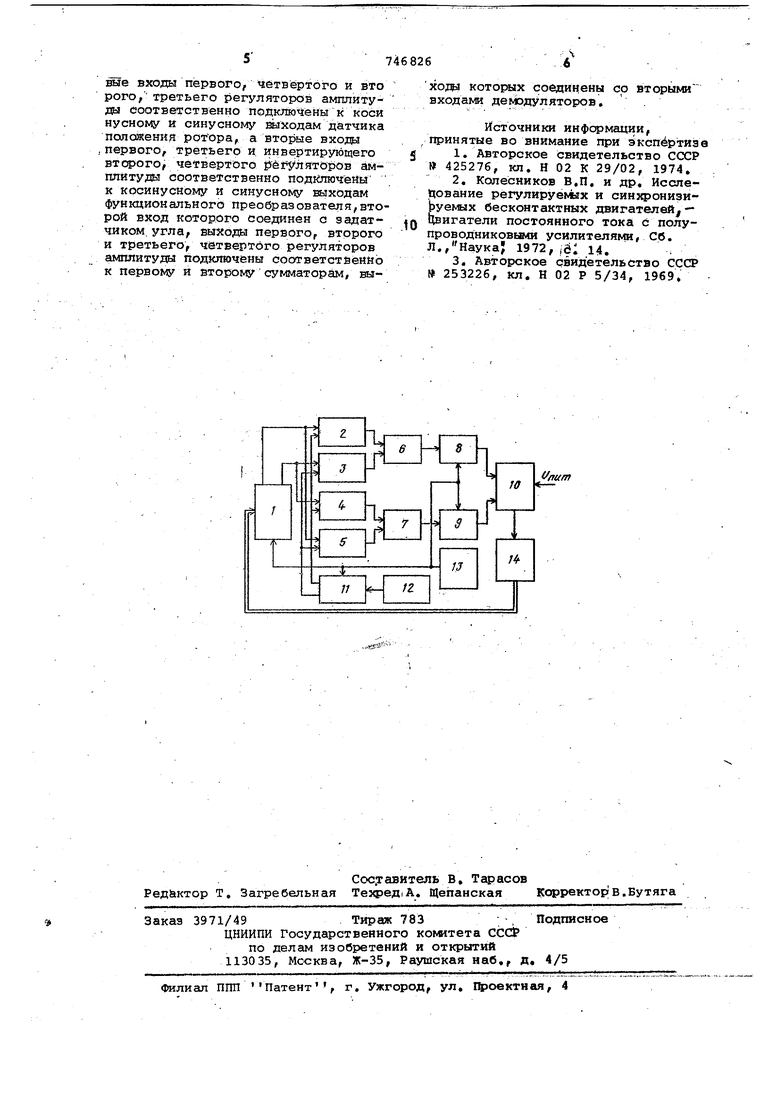
.На чертеже изображена блок-схе- йа электропривода.
Электропривод состоит из формирователя 1 сигнала управления, регулятора 2f 3f 4, 5 амплитуды, сумматоров б, 7, демодуляторов 8, 9 hpeобразователи 10 частоты, функционального преобразователя 11, эадатчика 12 угла межд5 векторами напр:ч ясШйя / и ЭДС возбуждениясинзсронного двигателя, генератора 13 синусоидального напряжения и двухфазного сйнзфбнндго двигателя 14,,
Формирователь 1 сигнала ynpaBJjeния состоит ИЗ устройства, регулирующего амплитуду напряжения, питаю1дего датчик положения ротора (ДПР) и самого датчика положения с синусным и;косинусным выходами. Напряжение с косинусного выхода ДПР поступает на первые входы регуляторов 2, 4 ам плитуды, а с синусного - на регуляторы 3, 5, причем регулятор 3 инвертирующий. На управляющие (вторые) входы регуляторов 2, 4 поступает напряжение постоянного тока с первого выхода функционального преобразователя 11, пропорциональное косинусу управляющего сигнала с задатчика 12 угла, а на управляющие входы регуляторов 3, 5 поступает постоянное напряжение пропорциональное синусу управляющего с йгнала с второго выхода функционального преобразовате, ля.
При вращении двигателя 14 и нулв вом вхёдном сигнале с задатчика 12 угла на управляющие входы регулято- ; ров 2, 4 амЯлитудда поступает максимально возможный сигнал с функциональмо1 о преобразователя 11, а на входы регуляторов 3, 5 - минимальный (нулевой) сигнал. При этом коэффициенты передачи регуляторов 2, 4 максимальны регуляторов 3, 5 равны нулю, а фазы напряжений на демодуляторах 8, 9 соответствуют огибающим напряжений на выходах ДПР, Эти напряжения через преобразователь 10 частоты поступают на обмотки синхронного двигателя. При наличии сигнала с задатчика 12 угла напряжение на первом выходе функционального преобразователя равно tut , а на втором : fUjag (U3c,g Q ) , :Coответственйо меняются коэффициенты регуляторов 2, ,3, 4, 5, Напряжение несущей частоты с выходов регуляторов 2, 3 и 4, 5 суммируются на суммйторах 6, 7, и их огибаю.щие выделяютсй на демодуляторах 8, 9, Фазы этих напряжений бу-дут опережать соагвётствующие огибающие с выходов ДПР при положительном и отставать при отрицательном сигналах с выхода задатчика 12 угла.
При вращении двигателя в обратную сторону сигналы с выходов ДПР и задатчика угла реверсируются и сдвиг фаз напряжений на демодуляторах 8, 9 со 4раняется неизменным. Величина фазового сдвига этих напряжений пропорциональна сигналу с задатчика угла..,
Расширение функциональных возможМо кнос тей электропривода достигается путем регулировки угла Q при помощи электронной схемы. Соответствующая реализация задатчика угла позволяет обеспечитьтребуемый закон изменения угла 0 , например максц(мальный КПД двигателя, максимум использования объема двигателя по мощности или регулирование скорости :.вращения, В электроприводе возможна практически безынерционная регулировка угла Э , которая позволяет реализовать оптимальные соотношения в синхронном электроприводе для различных условий применения.
Формула изобретения
Электропривод, содержащий синхронный двигатель, подключенный к преобразователю частоты, датчик положения ротора двигателя с синусным и косинусным выходами, генератор синусоидального напряжения, выход которого подключен к первым входам демодуляторов, к входу датчика положения ротора и к первому входу функционального преобразователя с синусным и косинусным выходами, а выходы демодуляторов подключены к управляющим входам преобразователя частоты, о тличающийся тем, что, с . целью расширения функциональных возможностей привода в него введены четыре регулятора амш1итуды, два сумматора, задатчик угла между векторами напряжения и ЭДС возбуждения син:фонного двигателяд причем первые входы первого, j6TBepToro и вТо рого, третьего регуляторов амплитуды соответственно подключены к коси нусному и синусному выходам датчика положения ротора, а вторые входы , первого, третьего и. инвертирующего второго, четвертого рёгуляторов амплитуды соответственно подйшочёйы к косинусному и синусному выходам функционального преобразователя,второй вход которого Соединен с эадатчиком. угла, выходы первого, второго и третьего, четвертого регуляторов амплитуды подключены соогветстйеййо к nepBoMs и BTopo f сумматорам, выхода которых соединены со вторыми входами демодуляторов.
Источники информации, , принятые во внимание при экспертизе
1.Авторское свидетельство CCXIP 425276, кл, Н 02 К 29/02, 1974.
2.Колесников В.П, и др. Исслейование регулируемых и синхронизируемых бесконтактных двигателей.- цвигатели постоянного тока с полу0проводниковшш усилителякм, Сб. Л.,Наука 1972, ,б: 14..
3.Авторское свидетельство СССР 253226, кл. Н 02 Р 5/34, 1969,
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1973 |
|
SU888312A2 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2656354C1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1684900A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1986 |
|
SU1417150A2 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
пит
