Изобретение относится к электротехнике, в частности к электрическим машинам с бесконтактной коммутацией, и может быть использовано в моментных электроприводах, работающих в реверсивных безредукторных исполнительных электромеханизмах.
Цель изобретения - повышение точности регулирования частоты вращения и быстродействия бесконтактного двигателя постоянного тока.
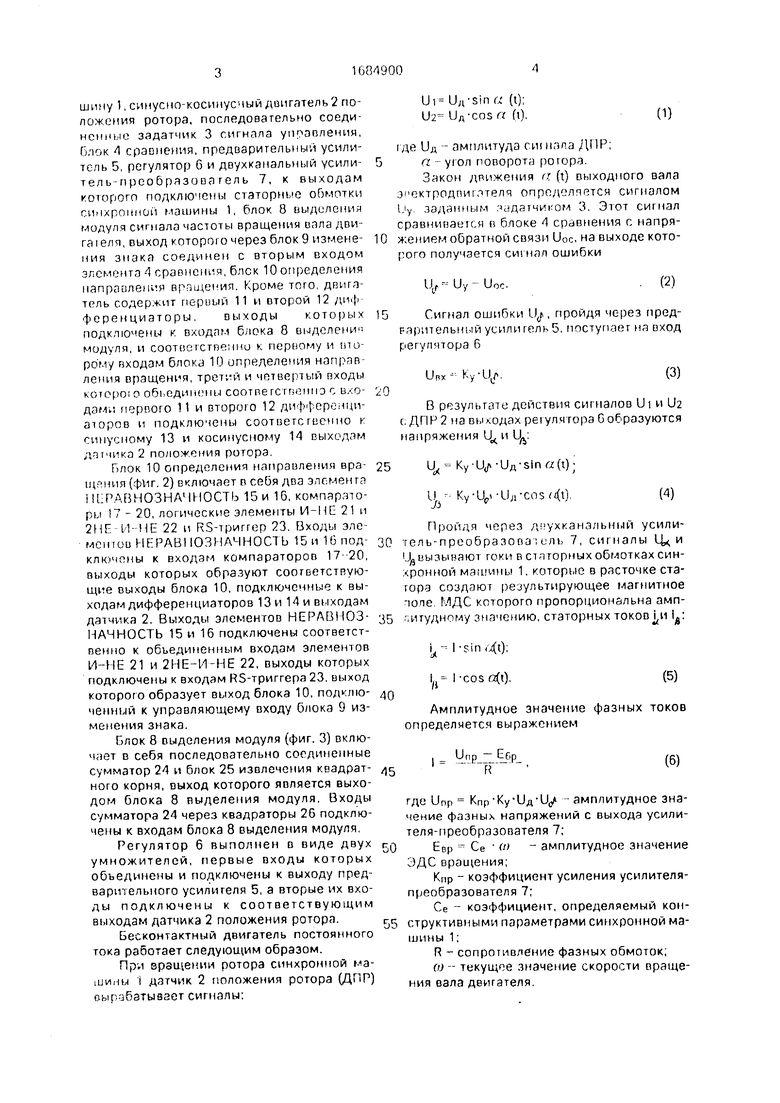
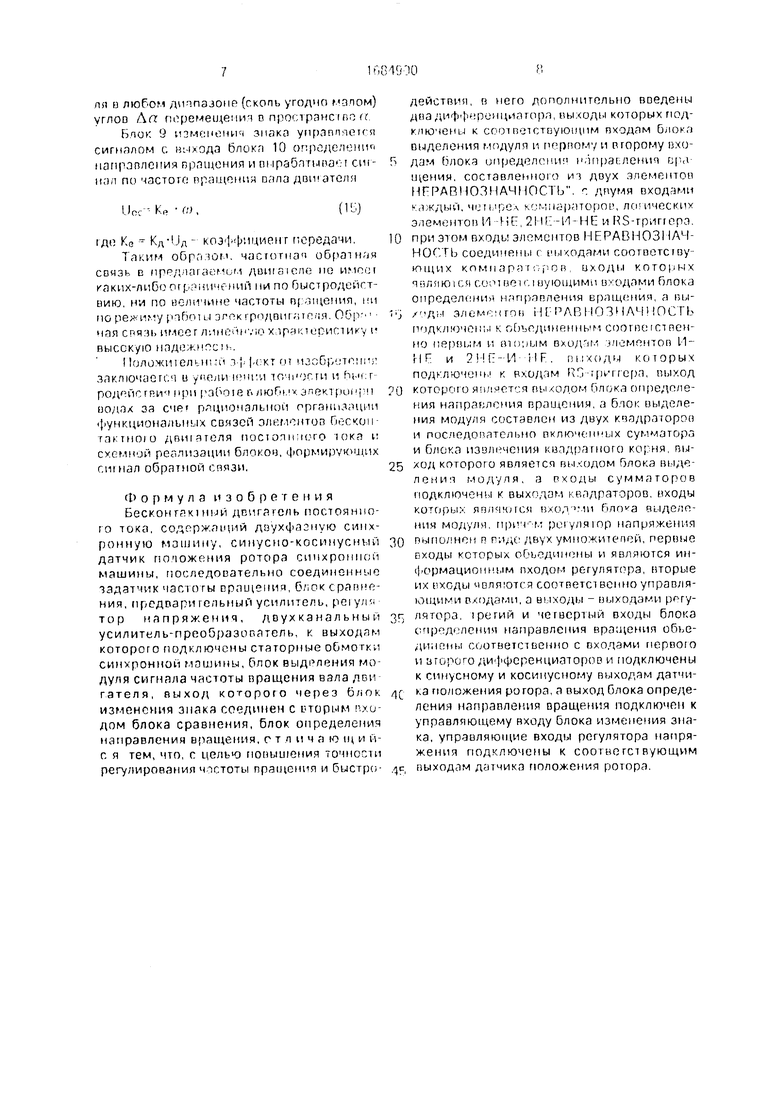
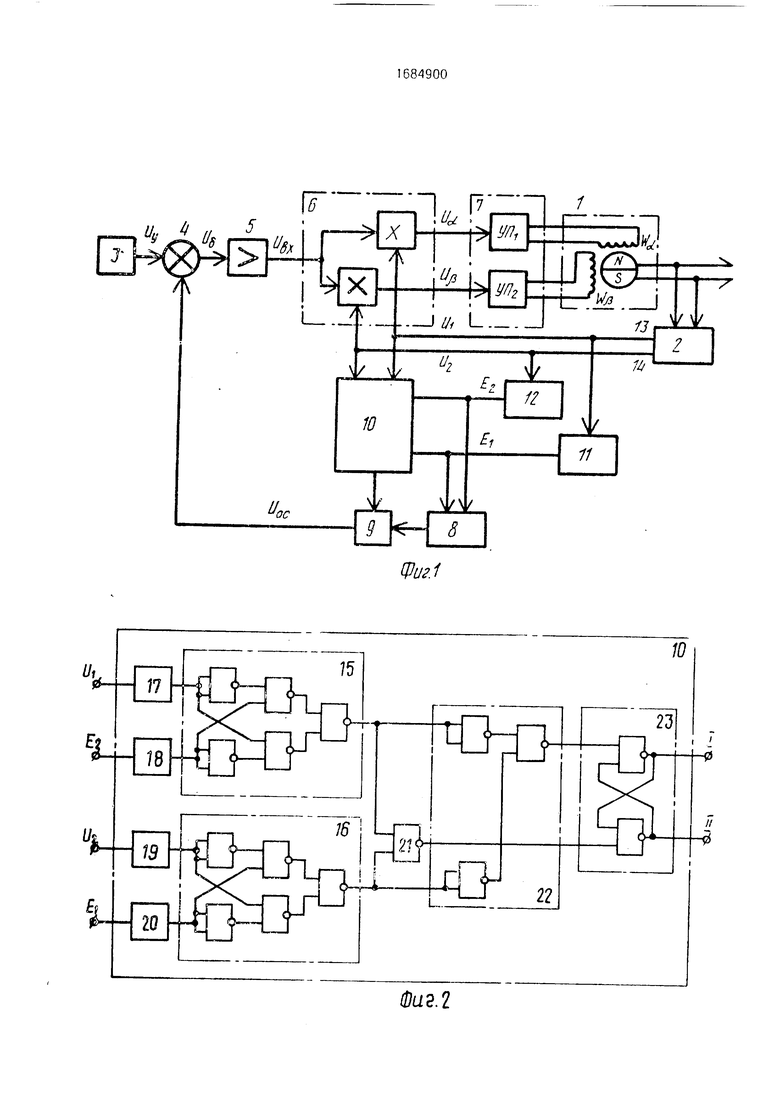
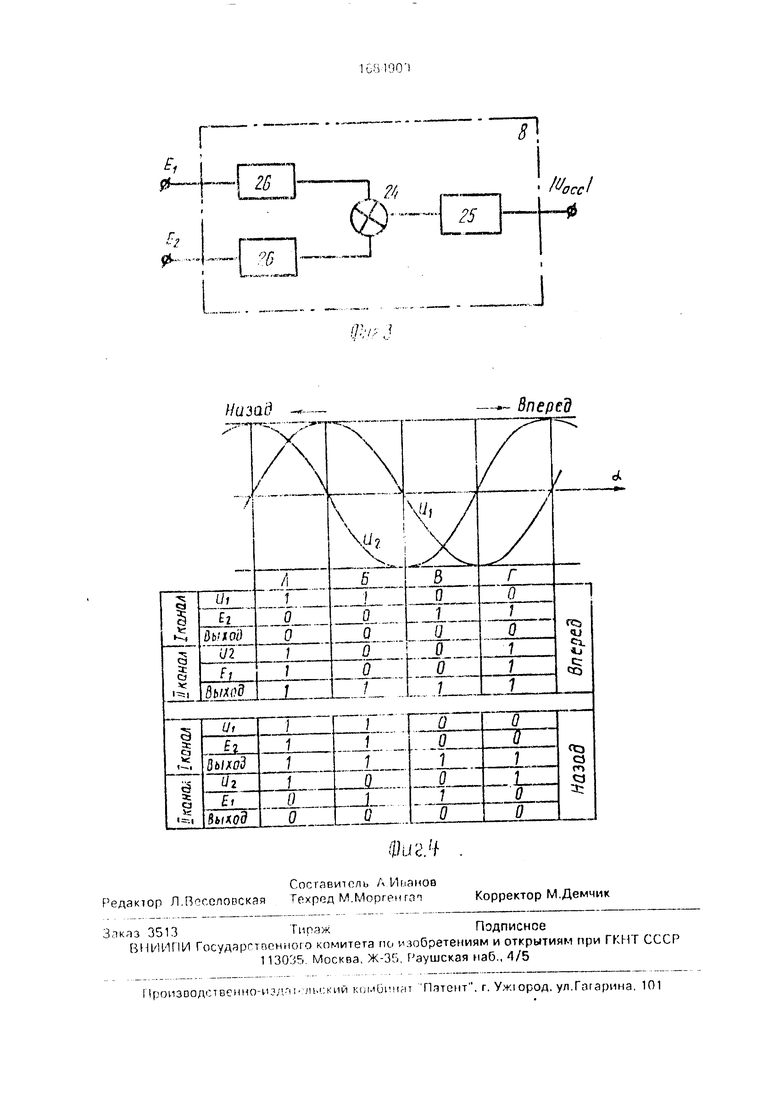
На фиг. 1 изображена Функциональная схема бесконтактного двигателя постоянного тока; на фиг. 2 - схема блока определения направления вращения; на фиг. 3 - схема блока выделения модуля сигнала частоты вращения; на фиг. 4 - эпюры напряжений на выходе датчика положения ротора и логическое состояние элементов блока определения направления вращения.
Бесконтактный двигатель постоянного тока содержит двухфазную синхронную мао
00
N Ю
о о
шипу 1, синусно-косииусмый двигатель 2 положения ротора, последовательно соеди- нснннс задатчик 3 сигнала управления, блок 4 срэонения, предварительный усилитель 5, регулятор G и двухканальный усили- тель-преобразователь 7, к выходам которого подключены стэторные обмотки синхронной машины 1, блок 8 выделений модуля сигнала частоты вращения вала дви- гагеля, выход которого через блок 9 измене- ния знака соединен с вторым входом элемента 4 сравнения,блек 10 определения направления вращения. Кроме того двигатель содержит первый 11 и второй 12 диф ференциаторы, выходы которых подключены к входом блока 8 выделение модуля, и соответственно к первому и tiTO рому входам блокл 10 определения направ ления вращения, третий и четвертый входы которою объединены соответственно с в,-о- дэми первого 11 и второю 12 дифференциаторов и подключены соответственно к гинусному 13 и косинусному 14 выходам датчика 2 положения ротора
Блок 10 определения направления вра- щ°ния (фиг. 2) включает в себя два элемента I РАВНОЗНАЧНОСТЬ 15 и 16, компараторы 17 - 20, логические элементы И-НС 21 и 2НЕ И НЕ 22 и RS-триггер 23. Входы элементов НЕРАВНОЗНАЧНОСТЬ 15 и 16 под- ключены к входам компараторов 17 20, выходы которых образуют соответствующие выходы блока 10, подключенные к выходам дифференциаторов 13 и 1А и выходам датчика 2. Выходы элементов НЕРАВНОЗ- НАЧНОСТЬ 15 и 16 подключены соответственно к объединенным входам элементов И-НЕ 21 и 2НЕ-И-НЕ 22, выходы которых подключены к входам RS-триггера 23, выход которого образует выход блока 10, поделю- ченный к управляющему входу блока 9 изменения знака.
Блок 8 выделения модуля (фиг. 3) включает в себя последовательно соединенные сумматор 24 и блок 25 извлечения квадрат- ного корня, выход которого является выходом блока 8 выделения модуля. Входы сумматора 24 через квадраторы 26 подключены к входам блока 8 выделения модуля,
Регулятор 6 выполнен в виде двух умножителей, первые входы которых объединены и подключены к выходу предварительного усилителя 5, а вторые их входы подключены к соответствующим выходам датчика 2 положения ротора.Бесконтактный двигатель постоянного тока работает следующим образом.
При вращении ротора синхронной ма- .IJHHU I датчик 2 положения ротора (ДПР) оырэбатыааетсигналы:
Ui UA-sin a (t), ид-cos a ft).
(1)
где ид - амплитуда отняла ДПР,
а - утл поворота ротора
Закон движения a (t) выходного вала змоктродвиглтеля определяется сигналом I у заданным сдатчиком 3. Этот сигнал сравнивается в бпоке 4 срс внения с напряжением обратной связи Uoc, на выходе которого получается cm нал ошибки
Цг-U,- Uoc.
(2)
Сигнал ошибки Цт, пройдя через пред- рарительный усилитель 5, поступает на вход регулятора б
Unx- К,-Ц/.
(3)
В результате действия сигналов Ui и 1)2 с ДПР 2 на выходах ретулягорэ G образуются напряжения и LL
1 Ky-U -Ufl-slna(t); Ijj- KylV-IVcos t)
(4)
Пройдя через дчухканэлышй усили- гель-преобразова;ель 7, сигналы вызывают токи в стлторных обмотках син- ронной Maiiaiiibi 1. которые в расточке статора создают результирующее магнитное чопе МДС которого пропорциональна амплитудному значению, статорных токов и
I -sin Xt), L I -cos o(t).
(5)
Амплитудное значение фазных токов определяется выражением
У..- R
(6)
где Unp КПр Ку-Уд-и,/ - амплитудное значение фазных напряжений с выхода усилителя-преобразователя 7;
ЕВр Се (о - амплитудное значение ОДС вращения;
Кпр - коэффициент усиления усилителя- преобразователя 7;
Се - коэффициент, определяемый конструктивными параметрами синхронной машины 1;
R - сопротивление фазных обмоток,
(о - текущее значение скорости вращения вала двигателя
Момент, развиваемый двигателем, с учетом (6) равен
Мдв См 1,
где См - коэффициент, определяемый конструктивными параметрами синхронной машины 1.
Мгновенное (текущее) значение час юты вращения вала двигателя определяется вч- ражением
О)
- da(t) dt
Дифференциаторы 1 и 12 выполняют дифференцирование сигналов с выходе1 13 и 14 сигналов ДПР 2. Выходные сигналь: дифференциаторов в 11 и 14с учетом (8) имеют следующие значения:
EI Кд-ид со coso(t);
Е2 Кд-Ufl (О Sin G(t),
где Кд - коэффициент передачи дифференциаторов.
Полученные сигналы Ei и Е2 несут информацию о частоте вращения гопала двигателя, но промодулированы знакопеременными тригонометрическими функциями углового перемещения sin о( и cos oft).
Выделение сигнала, пропорционального частоте вращения, происходит в блоке 8.
Блок 8 выделения модуля (фиг. 3) вырабатывает модуль частот ы вращения (Uoc) согласно выражению
I Uoc I VE + E Кд ид I a) I . (10)
Согласно уравнениям -гу- Кд а) .
Е2 -Г|- Кд -а), получаем из (1) и (9) знак
сигнала Uoc, который определяется выражением сигнатур:
slgn{U0c
-«()Чж)
Выражение (11) также имеет теоретическое значение, однако ему эквивалентно уравнение
slgn{Uoc} - sign{Ei -U2} sign{E2 -Ui) (12)
В двигателе работа блока 10 омредрче- ния направления вращения осноплна нг уравнении (12j. Вредные компараторы 1 20 (фи1. 3) преобразуют полярность п лсни- Fj ческие сигналы V и О, соответствующие знакам 4 и входных сигналов Ci и , Е.и Ui.
Элемент НЕРАВНОЗНАЧНОСТЬ 15 рл ботает по сигналам П и U:. выходной сигнал 10 имеет значение
U15 sign{Ei}-sign{U }- sign{ErlJ2}, (13)
а элемент НЕРАВНОЗНАЧНОСТЬ 16 раГю- 15 тает по сигналам Е; и Ui, выходной сигнал имеет значение
U16 sign{E2}-sign{Ui} - sign{E2 4Ui} (14)
20Работа блока 10 определения направления вращения поясняется просгрансгпен- ной диаграммой (фиг. 4), где дана таблица сигнатур входных сигналов EI и 1)2, Е2 и Ui в зависимости от направления вращения.
25 Для возрастания сигналов U; и U2 сигнал сигнатур EI и Е2 равен 1. для убывания сигнал сигнатур EI и Е2 павен О.
Выходные сигналы элементов НЕРАВНОЗНАЧНОСТЬ 15 и 16 инверсны и изменя30 ются мгновенно на противоположное значение при изменении направления вращения в любой точке пространств;) и работе двигателя в любом диапазоне углов а. Блок 10 определения направления вращения вы35 полней двухканальным для предотвращения влияния эффектов риска и гонки, возникающих при движении на границах зон А -Б-В- Г (фиг. 4) и т.д., где имеются критические точки, в которых сигналы Ei и
40 Е2С дифференциаторов 1 1 и 12 имеютмалое значение и на работу начинает сказываться порог срабатывания компараторов 17-20. Поскольку эти точки разнесены в пространстве углов а перемещения, то на границах
/55 зон А--Б и В-Г сбой сигнала UIG (мал сигнал EI) компенсируется стабильностью сигнала UTS, Я на границе зон Б и В (мал сигнал Е2) сигнал Uis корректируется сигналом Uie и т.д.
50Инверсные сигналы с выходив элементов 21 и 22 управляют триггером 23, выходы которого являются выходом блока 13 определения направления вращения. Сигнал 10 с выхода блока 10 определения направ55 ления вращения соответствует вращению вперед, а сигнал 01 - вращению назад При этом изменение сигнала блока 10 двигателя на противоположное значение происходит мгновенно при изменении направления вращения при работе двигателя в любом ДИТПЗЗОПР {гкопь угодно мапом) углов Л(7 перемещемич в пространство ft Ьпок 9 изменения знака управплеи я сигналом с блока 10 определении направления вращения и ш ipa6aruoa i cut- иол по частоте; вращения пала дви«ателя
Dec К,
(НО
1де К8 Кд-ид- коэффициент передачи,
Таким обра юг , частотна1 обратная связь в пррД инаемьм даитаюле по HMOIJT каких-либо ограничении ни по быстродействию, ни по неличине частоты п мщения, ни по ре ivy ртбпш грпдвиг;иг1 я Обрг чая спячь nr.icer линеикло х трчктисистик высск/ю надеж °см .
I Коложшелип ри т j |.с кт m плобряемп заключаен.ч и упрли if it vi точности и rn-и г РОДРЙГ TFHVI мрп работе к люГч v j пеклюй; ч йодах за СЧР рациональной opranii -nuni функциональных связей эпепонтоп Песком Tai-Tnoio двигателя постоим юго юка и схемной реализации блоков, формирующих сишал обратной связи.
Формула изобретения Бесконг к1 ний двигатель постоянного тока, содержащий двухфазную синхронную машину, синусно-косинусннй датчик попожения ротора синхронной машины, последооательно соединенные задатчик чаглогы opauieiinn, б/, о к сравнения, предвари гельный усилитель, pei ynr- тор напряжения, двухканальны и усилитель-преобразователь, к выходам которого подключены ста торные обмотки синхронной машины, блок выделения модуля сигнала частоты вращения вала ДВР гателя, выход которого через блок изменения знака соединен с вторым ходом блока сравнения, блок определения направления вращения, отличаю щ и и- с я тем, что, с целью повышения точности регулирования ч тг.тоты пращснил и быстродействия, п него дополнительно введены два дифференциатора, вькоды которых подключены к соответствующим входам блока выделения модуля и первому и второму входам блока ипре.делонич n.inpat ленип ера щения. составленною из двух зпементоп HFPARH03HA4HOClb дпумя входами аждый, четире к мнсзраторор, логических элементов И 4F 21III -И- НЕ и RS-триггепа
при этом входы элементов HFPABH0311АЧ- соединены с 1 ькодами соответсгву ющих ком паря Г (чов их од и которых т 5ляюк.я common юующимп вводами блока определения напр/лпления , а элимгмгти Ht РЛПМОЗЧАЧЧПСГЬ подключен;- к объгдинрннь м соответственно первым и вио;,ым оход н/ (лементов 11- МГ и HF. выходы которых подьлючень1 к входам (xl rpcTrcfja, выход
которою ягн ег я выхолом блока определения направления вращения, а бток выделения модуля составлен из двух кпадратороо и последовательно включенных сумматора и блока извлечения квадратного ко ня пыход которого является вы-содом блока выделения модуля, а сумматоров подключены к выходом ьвадратэров, входы которы:« являются в/ол чи выделения мод/ля прпч м ричуляюр напряжения
выпо/ нен Р гид1 двух умножителей, первые входы ксторьи оОь диноны и являются информационным входом регулятора, вторые их входы являются соответственно управляющими входами, а выходы - выходами р гулятора, третий и четвертый входы блока определения направления вращения обье- Д1ыпны соответственно с сходами первою и ьгирого дифференциаторов и подключены к синусному и косинусному выходам датчика положения ротора, а выход блока определения направления вращения подключен к управляющему входу блока изменения знака, управляющие входы регулятора напряжения подключены к соответствующим
выходам датчика положения ротора.
Фаз.I
Г
7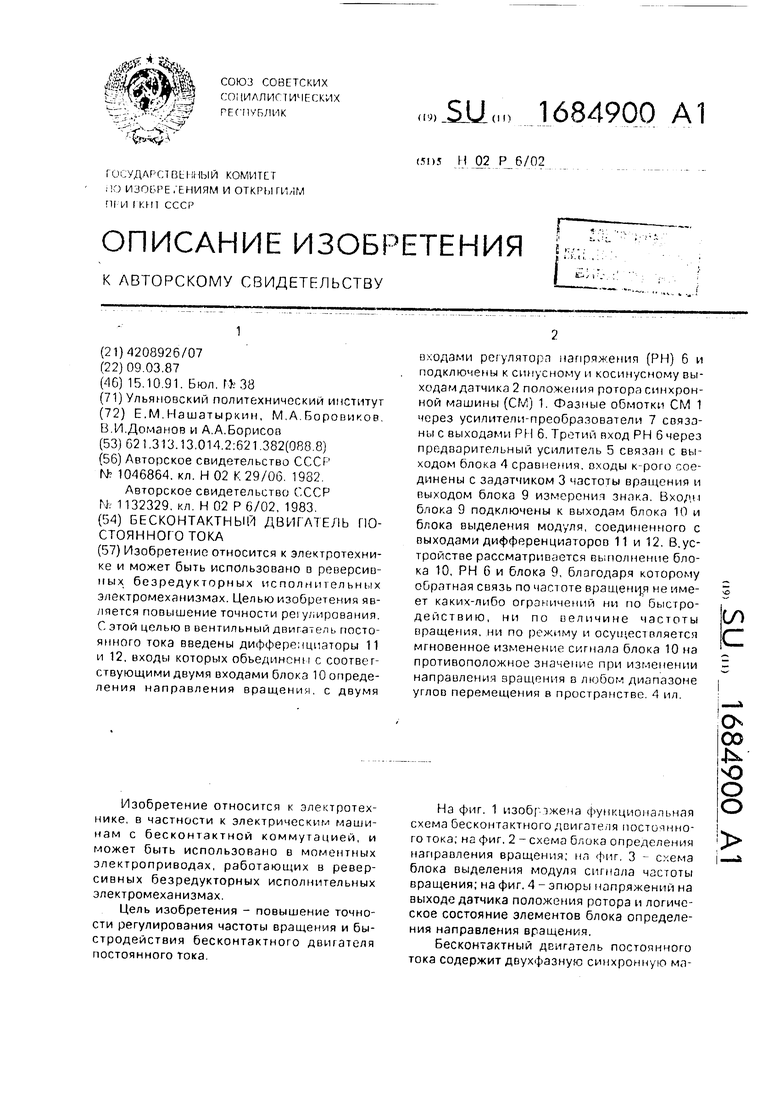

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Вентильный электродвигатель | 1974 |
|
SU663034A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1988 |
|
SU1721777A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Способ возбуждения резонансных колебаний механических систем и устройство для его осуществления | 1988 |
|
SU1609515A1 |
| Вентильный электродвигатель | 1989 |
|
SU1809504A1 |
Изобретение относится к электротехнике и может быть использовано о реверсивных безредукторных исполнительных электромеханизмах. Целью изобретения является повышение точности pei улирования. С этой целью в вентильный двигатель постоянного тока введены дифференциаторы 11 и 12, входы которых объединены с соответствующими двумя входами блока 10 определения направления вращения, с двумя входами регулятора напряжения (РН) 6 и подключены к синусному и косинусному выходам датчика 2 положения ротора синхронной машины (СМ) 1. Фазные обмотки СМ 1 через усилители-преобразователи 7 связаны с выходами РН 6. Третий вход РН 6 через предварительный усилитель 5 связан с выходом блока 4 сравнения, входы к-рого соединены с зэдэтчиком 3 частоты вращения и выходом блока 9 измерения знака. Входи блока 9 подключены к выходам блока 10 и блока выделения модуля, соединенного с выходами дифференциаторов 11 и 12. В.устройстве рассматривается выполнение блока 10, РН 6 и блока 9, благодаря которому обратная связь по частоте вращения не имеет каких-либо ограничений ни по быстродействию, ни по величине частоты вращения, ни по режиму и осуществляется мгновенное изменение сигнала блока 10 на противоположное значение при изменении направления вращения в любом диапазоне углов перемещения в пространстве. А ил. (Л С
о
0-
Назад
J5
/W
//:/ . i1
-- Вперед
/
4
jr
0
ПС5 «U Cl. 4j
Ј
Q
Q
Q
0
0
ta a
m
§
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
