(5) ЭЛЕКТРОПРИВОД


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1973 |
|
SU746826A1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотнорегулируемый синхронный электропривод | 1983 |
|
SU1108596A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
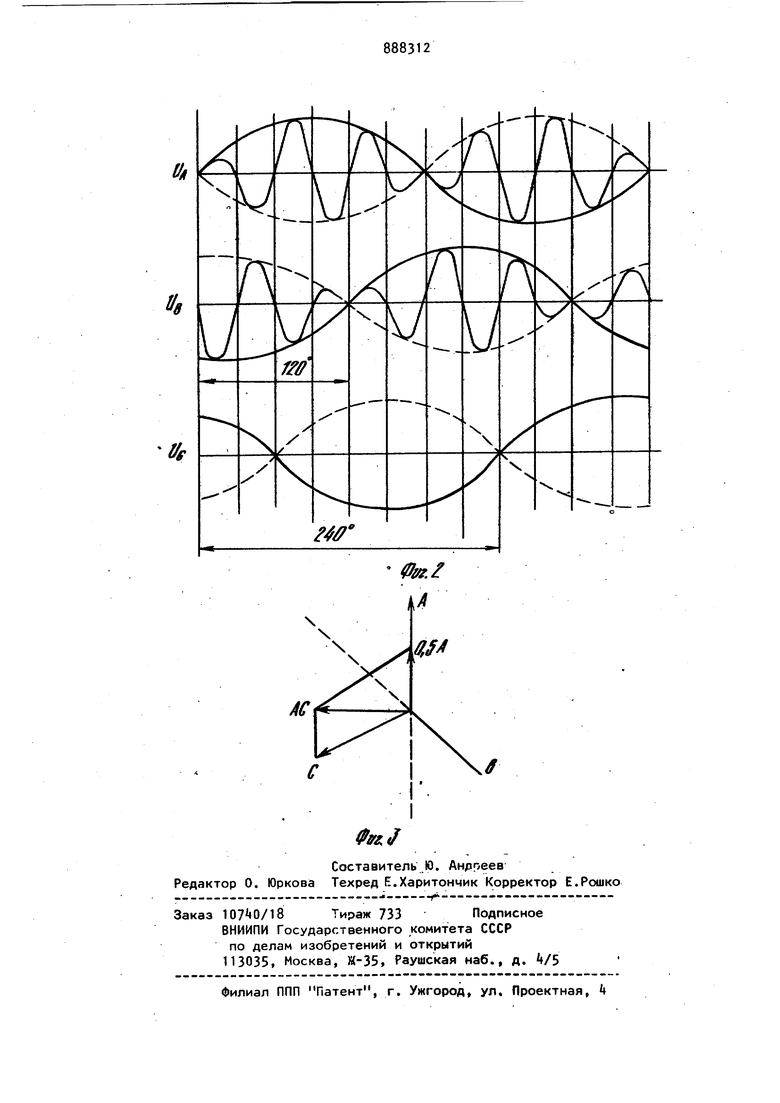
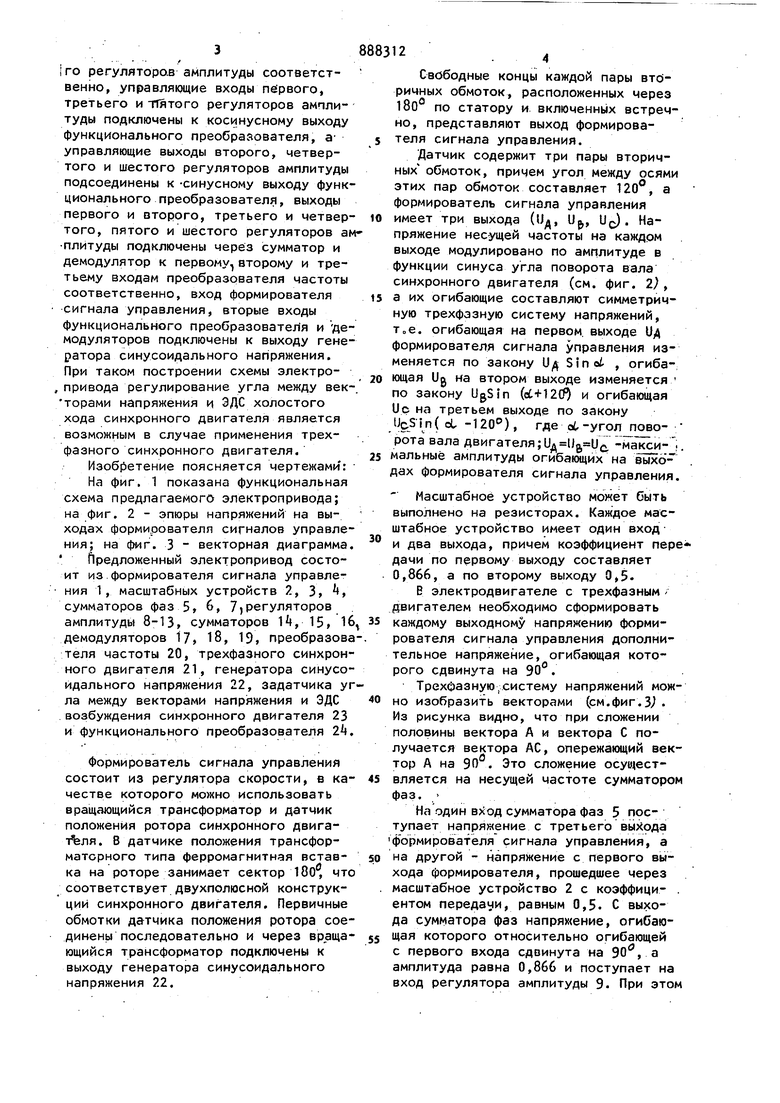
Изобретение относится к электротехнике и может быть использовано пр создании регулируемых электроприводо и систем автоматического регулирования на базе вентильных или бесщето ных двигателей постоянного тока. В основном авт.св. № описан Формирователь сигналов управления, регулятбры амплитуды, преобразо ватель частоты, функциональный преобразователь, задатчик угла между векторами напряжения и ЭДС возбуждения синхронного двигателя, генератор синусоидального напряжения и дву фазный синхронный двигатель 1. В схеме указанного электропривода не обеспечивается регулировка угла между векторами напряжения и ЭД возбуждения синхронного двигателя пр применении трехфазного синхронного двигателя. Целью изобретения является расширение функциональных возможностей устройства. Цель достигается тем, что в схему (Предлагаемого электропривода введены три масштабных устройства с двумя выходами каждое, три сумматора фаз, два регулятора амплитуды, причем первый выход формирователя сигнала управления подключен к первому масштабному устройству и второму сумматбру. фаз, второй выход формирователя сигнала управления подключен к второму масштабному устройству и третьему сумматору фаз, второй выход формирователя сигнала управления подключен к второму масштабному устройству и третьему сумматору фаз, первые выходы первого, второго и третьего масштабных устройств подключены соот-, ветственно к первому, третьему и пятому регуляторам амплитуды, вторые выходы масштабных устройств подключе-ны соответственно к вторым входам первого, второго и третьего сумматоров фаз, выходы которых подключены к входам второго четвертого и шестоi ГО регуляторов амплитуды соответственно, управляодие входы первого, третьего и ттятого регуляторов амплитуды подключены к косинусному выходу функционального преобрааователя, ауправляющие выходы второго, четвертого и шестого регуляторов амплитуды подсоединены к -синусному выходу функционального преобразователя, выходы первого и второго, третьего и четвертого, пятого и шестого регуляторов ам плитуды подключены через сумматор и демодулятор к первому, второму и третьему входам преобразователя частоты соответственно, вход формирователя сигнала управления, вторые входы функционального преобразователя и демодуляторов подключены к выходу генератора синусоидального напряжения. При таком построении схемы электро, привода регулирование угла между векторами напряжения и ЭДС холостого хода синхронного двигателя является возможным в случае применения трехфазного синхронного двигателя. Изоб()етение поясняется чертежами: На фиг. 1 показана функциональная схема предлагаемого электропривода; на фиг. 2 - эпюры напряжений на выходах формирователя сигналов управления; на фиг. 3 - векторная диаграмма. Предложенный электропривод состоит из.формирователя сигнала управления 1, масштабных устройств 2, 3, , сумматоров фаз 5, 6, 7)регуляторов амплитуды 8-13, сумматоров If, 15, 16 демодуляторов 17, 18, 19, преобразова теля частоты 20, трехфазного синхронного двигателя 21, генератора синусоидального напряжения 22, задатчика уг ла между векторами напряжения и ЭДС .возбуждения синхронного двигателя 23 и функционального преобразователя 2 Формирователь сигнала управления состоит из регулятора скорости, в качестве которого можно использовать вращающийся трансформатор и датчик положения ротора синхронного двигач%ля. В датчике положения трансформаторного типа ферромагнитная вставка на роторе занимает сектор 18о, что соответствует двухполюсной конструкции синхронного двигателя. Первичные обмотки датчика положения ротора сое динены последовательно и через враща ющийся трансформатор подключены к выходу генератора синусоидального напряжения 22. Свободные концы каждой пары вторичных обмоток, расположенных через 180 по статору и включенных встречно, представляют выход формирователя сигнала управления. Датчик содержит три пары вторичных обмоток, причем угол между осями этих пар обмоток составляет 120°, а формирователь сигнала управления имеет три выхода (Пд, U, U). Напряжение несущей частоты на каждом выходе модулировано по амплитуде в функции синуса угла поворота вала синхронного двигателя (см. фиг. 2), а их огибающие составляют симметричную трехфазную систему напряжений, т„е. огибающая на первом, выходе Уд формирователя сигнала управления изменяется по закону ид Sinot , огибающая Ug на втором выходе изменяется по закону UgSIn (е6+12() и огибающая Uc на третьем выходе по закону -120), где Ы.-угол поворота вала двигателя ,LI. -м акси-. мальныё амплитуды огибающих на Bbixoах формирователя сигнала управления. Масштабное устройство может быть выполнено на резисторах. Каждое масштабное устройство имеет один вход и два выхода, причем коэффициент пере дачи по первому выходу составляет 0,866, а по второму выходу 0,5. В электродвигателе с трехфазным двигателем необходимо сформировать каждому выходному напряжению формирователя сигнала управления дополнительное напряжейие, огибающая которого сдвинута на 90°. Трехфазную-систему напряжений можно изобразить векторами (см.фиг.3 . Из рисунка видно, что при сложении половины вектора А и вектора С получается вектора АС, опережающий вектор А на 9о. Это сложение осуществляется на несущей частоте сумматором фаз. На один вход сумматора фаз 5 поступает напряжение с третьего выхода формирователя сигнала управления, а на другой - напряжение с первого выхода формирователя, прошедшее через масштабное устройство 2 с коэффици- . ентом передачи, равным 0,5. С выхода сумматора фаз напрях еиие, огибающая которого относительно огибающей с первого входа сдвинута на 90, а амплитуда равна 0,866 и поступает на вход регулятора амплитуды 9. При этом
на вход регулятора амплитуды 9 поступает напряжение с первого выхода формирователя сигнала управления, которое проходит чере-з масштабное устройство 2с коэффициентом передачи, равным 0,866. Аналогично формируются сигналы регуляторов амплитуды других фаз.
С выхода регуляторов амплитуды 8,9 напря}яения поступают на сумматор l4, а затем на демодулятор 17, где и выделяется огибающая.
Рассмотрим работу предложенного электропривода. Амплитуда и фаза огибающих на выходе формирователя сигнала управления определяет Скорость и направление вращения синхронного двигателя. После преобразования фаз путем суммирования и масштабирования их огибающие меняются по закону: с выхода масштабного устройства 2 ,866 Sin ot, с выхода сумматора фаз 3 (et -9JO°). с вых:ола. масштабноУо устройства 4 1%0,866Sin ч с выхода сумматора 5 in(oL-fl20-90 ). с выхода масштабного устройства 6 Uc0,B66 Sin(ct -120°). с выхода сумматора фаз 7 Ус.(о.120-90°). При отсутствии сигнала с задатчикаугла с косинусного выхода функционального пpeoбpaзoвaтe fя на управляющие 8, 10, 12 регуляторов амплитуд поступает максимальное напряжение,.поэтому коэффициенты передачи этих регуляторов амплитуды максимальны. В то же время с синусного выхода функционального преобразователя на управляющие входы 9, 11, 12 регуляторов амплитуды поступает минимальное (нулевое) напряжение и потому коэффициенты передачи этих регуляторов амплитуды равны нулю. Следовательно, на сумматорах суммируются максимальное и нулевое напряжение. Напряжения с сумматоров 1А, 15 16:поступают на демодуляторы 17, 18, 19, где и выделяются огибающие. Фазы огибающих на демодуляторах 17, 18, 19 совпадают с фазами огибающих на первом, втором и третьем выходах формирователя сигнала управления соответст венно, т.е. при отсутствии сигнала с задатчика угла, пуск и работа электропривода осуществляется так же, как если бы выходы формирователя сигнала управления, минуя масштабные устройства, сумматоры фаз, регуляторы амплитуды были подключены к своим демодуляторам.
При максимальномположительном сиг нале с задатчика угла с косинусного выхода на управляющие входы 9, 11, 13 регуляторов амплитуды поступает, например, максимальное положительное напряжение, при этом фазы сигналов несущей частоты на входе и выходе регуляторов амплитуды совпадают и на демодуляторах 17, 18, 19 выделяются огибающие, совпадающие по фазе с фазами огибающих на выходах сумматоров фаз 5, 6, 7 соответственно, т.е. огибаю« ие сдвинуты, на 90 в сторону опережения относительно огибающих при отсутствии сигнала с задатчика угла.
При максимальном отрицательном сигнале с задатчика угла на косинус-ном выходе функционального преобразователя будет также нулевое направление, а на синусном - максимальное отрицательное напряжение, при этом фаза несущей частоты на выходе регуляторов амплитуды 9, 11, 13 изменится на 180® по отношению к входной фазе.
На выходах демодуляторов 17, Ш, 19 фазы .огибающих изменятся на 180° по отношению к фазам огибающих на выходах сумматоров фаз 5, 6, 7, Тое. огибающие сдвинуты на 90 в сторону отставания от огибающих при отсутстВИИ сигнала с задатчика угла, :
При изменении сигнала с задатчика угла от максимального положительного до максимального отрицательного, значения, фазы огибающих будут изменяться в пределах±90°.
Формула изобретения
Электропривод по авт. св. № 7 682f/ Отличающийся тем, что, с целью расширения функциональных воз момностей - в него введены три масштабных блока с двумя выходами каждый, три сумматорафаз, причем первый выход датчика положения ротора подклю-чен к первому масштабному блоку и второму сумматору фаз, второй выход подключен к второму масштабному блоку и третьему сумматору фаз, третий выход датчика положения ротора подключен к третьему масштабному блоку и первому сумматору фаз, первые выходы масштабных блоков подключены к входам регуляторов амплитуды, соответственно вторые выходы масштабных
.78883128
блоков подклк)чены к вторым входамИсточники информации,
сумматоррв соответственно, выходыпринятые во внимание при экспертизе которых подключены к входам регуллто- 1. Авторское свидетельство СССР
ров амплитуды соответственно.№ , кл. Н 02 Р 5/Об, 1973.
