РЬобретение относится к вычиспитепь- ной технике оно может быть испопьзовеино в автоматизирЬв энных CHCTOvfax управления технологическим процессом производства интегральных схем, в частности оно может быть применено в автоматизированных системах контроля многослойных микроппат коммутации больших гибридных интегральных схем. Микроплаты коммутации больших гибридных интегральных схем представляют собой пластину из диэлектрика, например из ситалла, на котором любым известным способом выполнена многослойная, например двухслойная, токопроводящая разводка, соответствующая топологии данной микроплаты коммутации. В заданных точк токопроводящей разводки выполнены контактные площадки, используемые для присоединения кристаллов (чипов), образуюших большую гибридную интегральную cxfr му. Количество контактных .площадок микроплат коммутации достигает большой величины, в общем случае 24О-4СО. При контроле многослойных мюфоппвт коммутации БГИС определяется наличие электрического соединения каждых двух КОНТЕ1КТНЫХ площадок, представляющих интерес, величина с «ического сопротивления проводника, соединяющего эти две контактные площадки, и отсутствие коротких замыканий между проводниками микр платы коммутации как в данном слоетокопроводящей разводки, так и в каждых двух прилегающих ее слоях. Известны устройства контроля микроплат коммутации, в которых Связь измерительных и регистрирующих приборов с проверяемой пластиной или микроплатой осуществляется с помощью набора подпру жиненных конт 1ктирующих игл зондовой головки, каждая из которых имеет электрический контакт с соответствующей кднтактной площадкой микроплаты коммутации. Устройство содержит предметный столшс, который может перемещаться в горизонтальной плоскости по осям X и У, и в вертикаш ном направлении по оси t . На предметном столике размещается проверяемая пластина или микроплата коммутаНИИ, которая перемещается совместно с предм етным с то ликом 1 . Недостаток этого устройства - сложность конструкции. Известны устройства для контроля гиб ридных интегральных схем, содержащие координатный стоп с механизмом его перемещения., соединенный с блокам управлени перемещением стола, блок памяти, разме щенные на держателях зонды, соединенны через коммутатор с блоком измерения сопротивлений и блоком управления перемещением зондов С2. Недостаток устройств заключается в сложности оборудования контактирования, поскольку для перемешенияг каждого из двух держателей контактирующий игл по осям X и У нужны специальные манипуляторы, изготовленные по высокому классу точности. Кроме того, раздельное перемещение указанных держателей требует затрат времени, что снижает производительность работы устройств. Цель изобретения - упрощение устройс ва и псеышение прои;зводительности его работы. Это достигается тем, что в устройстве для контроля преш ущественно многослойных микроплат коммутации больших гибридных интегральных схем с регулярным расположением контактных площадок, содержащем координатный стол с механизмом его перемещения, соединенный с блоком управления перемещением стола, бпок ЭВМ, раз ещенныена держателе зонды, соединенные через коммутатор с блоком измерения сопротивлений и блоком управления перемещением зондов, зонды размещены на держателе двумя взаимоперпендикупярными рядами, в одном из которых количество зондов равно количеству контактных площадок в соответствующем ряду контролируемой -микроппаты коммутации, а в другом ряду - на едик:кцу меньше удвоен ного количества -KOHTaKTHbtx площадок другого ряда.
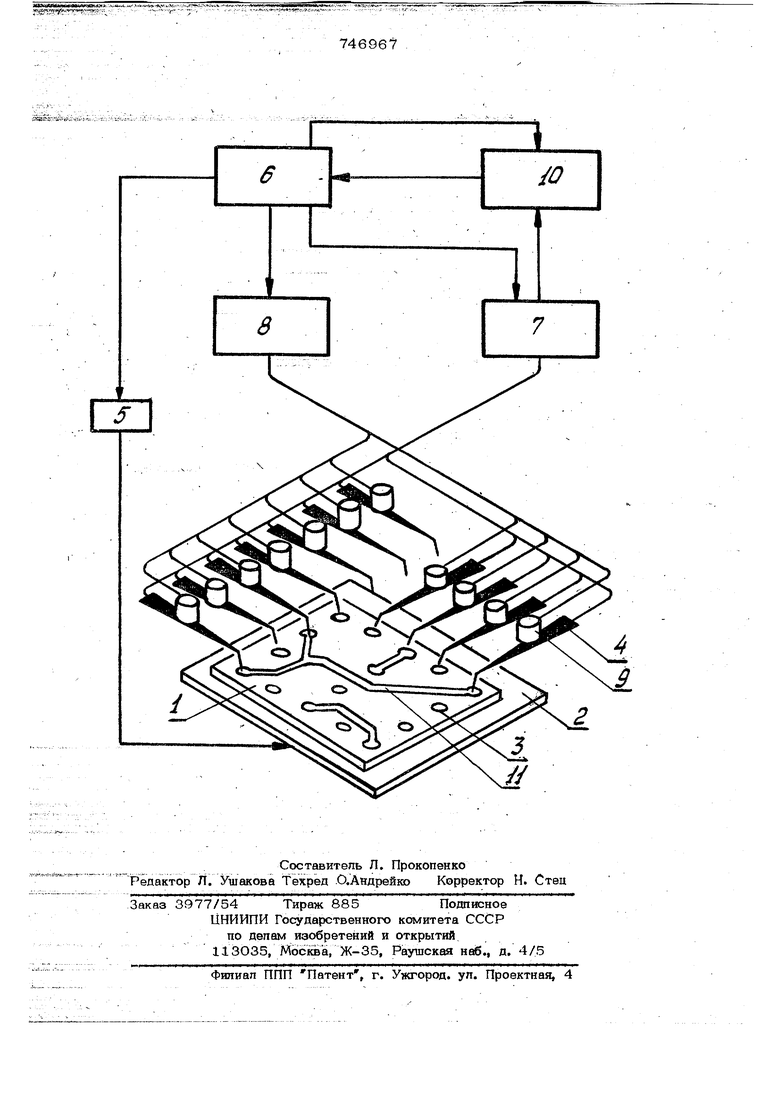
На чертеже изображена функциональная схема описываемого устройства.
Устройство для контротш преимуществ. вевно многослойных микроплат 1 коммутация содержит координатный стол 2, служащий для размещения микроплат 1 коммутации, с контактными площадками 3, зонды 4, размаденные на держателе двумя взаимно перпендикулярными рядами, например Т-образно. Механизм перемещения стЬла 2 соединен через блок 5 управления
занное соотношение количества зондов обусловлено тем, что один из этих зондов, а именно зонд, находящийся на пересечении горизонтального и вертикального рядов Т-образного набора, равно принадлежит рядам и поэтому учитывается, например, как зонд вертикального ряда при определении количества зондов горизонтального ряда.
В процессе работы устройства выходные сигналыс блока ЭВМ 6 посупаюТ на входы блока 5 управления перемещением стола 2, блока 10 измерения сопротивления, коммутатора 7 и блока 8 управления перемещением зондов 4. В соответствии с управляющими сигналами блока ЭВМ 6 координатный стоп 2, на котором установлена проверяемая микроплата 1 коммутации, перемещается по заданной программе в горизонтальной плоскости по осям X и У и в вертикальной плоскости по оси Z..
Перемещение микроппаты коммутации относительно Т-образного набора зондов 4 осуществляется таким образом, что зонд, находящийся в точке пересечения горизонтального и вертикального рядов Т-образного набора. Последовательно проходит в общем случае все контактные площадки 3 перемещением стола с блоком ЭВМ 6, который через коммутатор 7 соединен с зондами 4, а через блок 8 управления перемещением зондов - с электромагнитами 9. Блок 10 измерения сопротивления соединен с блоком ЭВМ 6 и коммутатором 7. На микроплате 1 коммутации размещены соединительные проводники 11. . Устройство работает следующим обра- зомМикроплата1 коммутации устанавливается на столе 2, который может перемещаться в горизонтальной плоскости по двум ортогональным осям и по вертикали. Перемещением стола 2 совмещают Т-образный набор зондов 4 с крайним рядом контактных площадок 3 микроплаты 1, расположенных регулярным образом, например взаимно перпендикулярными рядами, Т-образный набор зондов 4 устанавливается на неподвижном держателе (на чертеже не показан). При этом количество зондов 4, например, в горизонтальном ряду, равно удвоенному количеству контактных площадок в одном из их рядов на проверяемой микроплате коммутации минус один зонд, а количество зондов 4 в вертикальном ряду Т-образного набора равно количеству контактных площадо в друзо том их взаимно перпендикулярном ряду. Ука57465676
микроппаты коммутации. При каждом изЭлектромагниты 9 соединены жесткой тятаких перемещений по командам из блокагой с зондами 4, Обмотки электромагнитов
ЭВМ 6, поступаюшим через блок в управ-подключены к блоку 8 управления переления перемещением зондов 4, осуществпя-мещением зондов 4, с выхода которого
ется контактирование зондов 4 толь1со с jпитание на обмотки соответствующих теми кoнтaктньnvfи площадками 3, между которыми в данном положении Т-образного набора зондов производится измерение
электрического сопротивления. Остальные зонды находятся в это время в поднятом ю положении, что исключает механические .повреждения соответствующих контактных площадок 3. По программе, хранящейся в памяти блока ЭВМ 6, осуществляется последовательное подключение с помощью коммутатора 7 соответствующих зондов 4 к блоку 10 измерения сопротивлений После коммутации блок Ю осуществляет измерение величины сопротивления между выбранными контактными площадками а результат измерений вводится в блок ЭВМ б, которая выполняет сравнение этой величины с уставкой, хранящейся в оперативной памяти ЭВМ 6. Если рассогласование измеренной величины и уставки лежит в заданных пределах, то по команде блока ЭВМ 6 стол 2 перемещается в следующее заданное положение относительно Т-образного набора зондов 4, и цикл измерений повторяется. Если значение измеренной величины сопротивления и уставки различаются на величину, выходящую за установленные пределы, на печатающее устройство из блока ЭВМ 6 любым известным способом 3 выводится информация Брак. Во время каждого из циклов контроля соединений в многослойных микроплатах зонды 4 совмещаются избирательно только с ТИЛИ контактными ппошадками 3, кото- 4 рыми заканчиваются проверяемые в данный момент соединительные проводники. Остальные зонды в данный момент находятся в поднятом состоянии. При перемещении Т-образного набора зондов 4 в другое 4 (очередное) положение проверяются связи, существующие уже между другими контакт ными площадками. Это означает, что по заданной программе осуществляется опускание части зондов, которые ранее находились в поднятом положении, и их совмещение с соответствующими контактными площадками. Наряду и одновременно с этим осуществляется подъем ранее опущенных зондов 4. Подъем и опускание зондов 4 осуществляется с помощью электромагнитов 9, используемых по одному на каждый зонд.
электромагнитов подается по управляющим сигналам, поступающим в блок 8 из блока ЭВМ 6.
Периодическое по заданной программе избирательное и кратковременное совмещение зондов 4 только с заданными контактными площадками существенно уменьшает вероятность механического повреждения контактных площадок (царапины, проколы и т. д.). Кроме Т-образного размещения, зонды 4 при их расположении двумя взаимноперпендикулярными рядами могут быть расположены на держателе П-образно или же Г-образно. В описанном устройстве исключается использование раздельных манипуляторов для перемещения двух держателей зондов, что упрощает устройство, повышает производительность его работы за счет сокращения времени настройки, Формула изобретения Устройство для контроля преимущественно многослойных ми кроплат коммутации больших гибридных интегральных схем с регулярным расположением контактных площадок, содержащее координатный стол с механизмом его перемещения, соединенный с блоком управления перемещением стола, блок ЭВМ, размещенные на держателе зонды, соединенные через коммутатор с блоком, измерения сопротивлений и блоком управления перемещением зондов. л ич ающ ееся тем, что, с uenbio упрощения устройства и повышения проиэводитетшности его работы, зонды рЕюмещены на держателе двумя взаимно перпендикулярными рядами, в одном из которых количество зондов равно количеству контакт ных площадок, в соответствующем ряду контролируемой микроплаты коммутации, а в другом ряду - на единицу меньше удвоенного количества контактных площадок другого ряда. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3446065, кл. 73-105, 1969. 2. Патент СССР № 473383, кл. Н 01 С 17/ОО,1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОЙ ПОДГОНКИ РЕЗИСТОРОВ | 2012 |
|
RU2519689C2 |
| Устройство для контроля печатных плат | 1977 |
|
SU906046A1 |
| Устройство для подгонки тонкопленочных резисторов | 1980 |
|
SU960970A1 |
| Контактное устройство | 1979 |
|
SU932657A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕЧАТНЫХ ПЛАТ | 1993 |
|
RU2097949C1 |
| СПОСОБ СБОРКИ ТРЕХМЕРНОГО ЭЛЕКТРОННОГО МОДУЛЯ | 2012 |
|
RU2492549C1 |
| УСТРОЙСТВО ДЛЯ ПАРАМЕТРИЧЕСКОГО КОНТРОЛЯ МНОГОСЛОЙНЫХ ПЕЧАТНЫХ ПЛАТ | 2003 |
|
RU2256187C1 |
| Устройство для совмещения и экспонирования | 1989 |
|
SU1611155A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИБРИДНОГО ЭЛЕКТРОННОГО МОДУЛЯ | 2002 |
|
RU2222074C1 |
| Установка для пайки выводов полупроводниковых приборов | 1982 |
|
SU1031660A1 |