1
Изобретение относится к электрооборудованию подвижного состава железных дорог и предназначено для автоматического регулирования сил тяги и торможения электровозов.
Известен способ регулирования силы тяги и торможения электроподвкжного состава при автоматическом управлении путем сравнения сигналов, пропорциональных заданной и истинной скорости, сравнения полученного сигнала с сигналом, пропорциональным заданному значению силы тяги и торможения, выделения минимального из них и воздействия полученным сигналом на исполнительный орган (1|.
Этот способ регулирования силы тяги и торможения при автоматическом управлении не позволяет реализовать предельные по условиям сцепления силы тяги и торможения, так как при боксовании или юзе выделяют разность напряжений тяговых деталей и полученным сигналом воздействуют на реле боксования или юза, а с помощью реле скачкообразно воздействуют на исполнительный орган для снижения на определенную, наперед заданную величину силы тяги или торможения, независимо от глубины боксования или юза. После восстановления сцепления сила тяги или торможения скачком восстанавливается. Скачкообразное изменение силы тяги или торможения на фиксированную величину не учитывает состояние сцепления в каждый конкретный
момент времени. Сцепление может восстанавливаться при незначительном уменьшении силы тяги или торможения, а сброс во всех случаях производят до определенного наперед заданного уровня, который может
10 быть значительно ниже допустимого {допустнмь1Й уровень определяется коэффициентом сцепления, величина которого переменна и может изменяться в 1пироких пределах). В результате реализованная средняя сила тяги или торможения оказывается ни15 же предельной по сцеплению.
Цель изобретения - реализация предельных по условиям сцепления сил тяги и торможения.
Поставленная цель достигается тем, что
JQ сигнал, пропорциональный истинной скорости, ТОлучают путем непрерывного выделения мигнмального при тяге и максимального при торможении сигнала, пропорционального частоте вращения тяговых двигателей.
сравнивают их с сигналами, пропорциональными частоте вращения каждого тягового двигателя, выделяют разность между ними и №3 этой разности - сигнал, обратно пропор циоиальный ей.
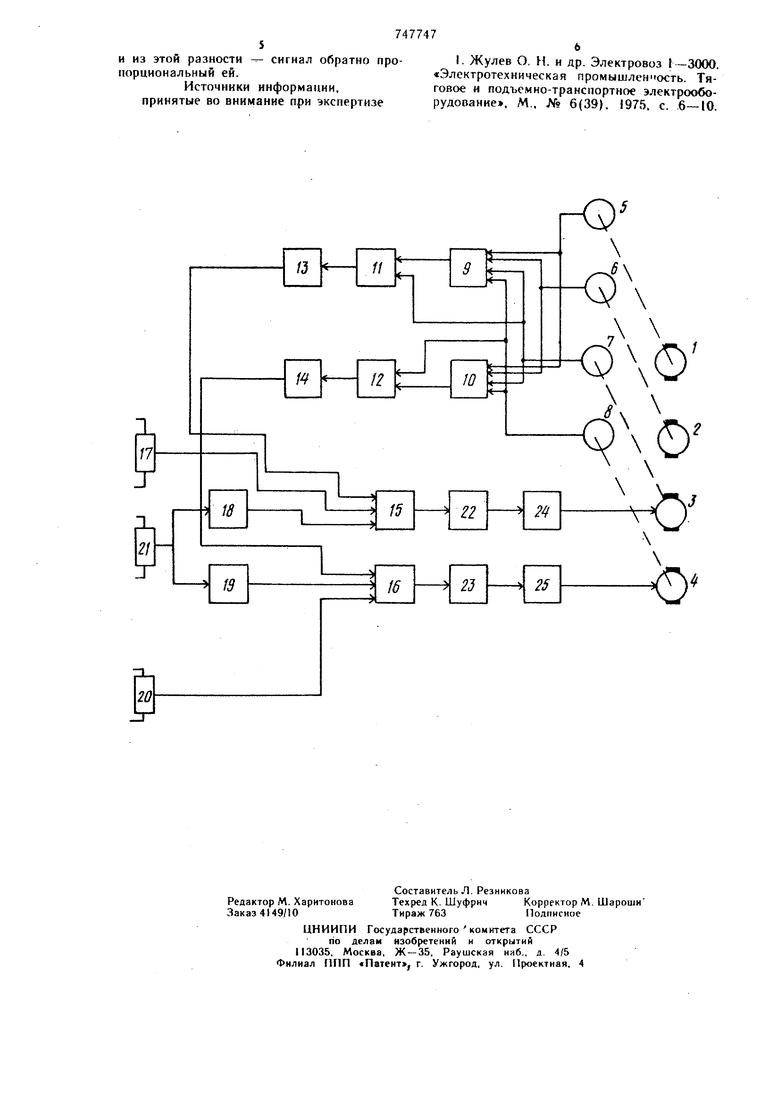
fete чертеже показана схема осуихествле}ш ггредлагаемого способа управление одни-м- двигателем в тяге и одним двигателем при торможении; управление остальными дв№р;} телйми аналогично).
Схема содержит тяговые двигатели 1-4, частота вращения которых замеряется датчиками 5-8 частоты вращения, подключениях на входы блоков 9 выделения минимального сигнала и 10 выделения максимального сигнала, выходы которых соединены с входами блоков 11 и 12 сравнения частсгаы вращения одного двигателя с минимальной и максимальной частотой соответственно. Блоки 13 и 14 выделения обратно п.р шорциональной величины входами под-, ключеиы соответственно к выходам блоков 11 и J, а выходами к блокам 15 и 16 сравнения.
Другие входы блока 15 сравнения соединены с задатчиком 17 тока (силы тяги) и с выходом регулятора 18 скорости, а другие входы блока 16 сравнения соединены с регулятором 19 скорости при торможении и задатчиком 20 тормозной силы, задатчик 21 скорости подключен к входам регулятора 18 и 19 скорости.
Устройство содержит также регуляторы 22 и 23 тока (силы тяги и тормозной силы) и исполиительные блоки 24 и 25.
Предлагаемый способ осуществляется следующим образом.
При пуске электровоза задатчиками 17- 2t дают пусковой ток (силу тяги) и скорость движения, с которой электровоз должен двигаться на перегоне. До выхода на заданную скорость, при отсутствии боксования, из трех сигналов, поступающих на вход блока сравнения с выхода регулятора 18 скорости, с задатчика тока (силы тяги) и с блока 13, минимальный сигнал с задатчика тока (силы тяги), поскольку рассогласование между заданным и истинньам значением скоростей движения электровоза при пуске большое, и, следовательно, на выходе регулятора скорости сигнал большой величины На выходе блока 13 также имеется сигнал большой величины, так как на входе (при отсутствии боксования) сравниваются примерно равные величины, а блок 13 выделяет обратно пропорциональную величину этой разности. Таким образом, сигнал с задатчика тока в этот период поступает на вход регулятора тока (силы тяги) в качестве установки и обрабатывается системой автоматического регулирования, т. е. пуск осуществляется с заданным током (силой тяги) В режиме стабилизации скорости, когда заданное и истинное значение скоростей
ПОЧТИ сравниваются, минимален сигнал с выхода регулятора скорости. Этот сигнал служит уставкой регулятора скорости тока (силы тяги). Система находится под контролем регулятора скорости. В это время
токовый контур разомкнут. Но как только возникает пробуксовка (чаще всего в режиме пуска) какой-нибудь колесной пары, сигнал на выходе элемента 13 начинает уменьшаться, так как на его выходе растет разность между минимальной частотой вращения двигателей и боксующим двигателем. Выход блока 13 уменьп ается по мере роста этой разности, т. е. по мере увеличения глубины буксования. Как только он становится меньше двух сигналов он начинает определять величины уставки регулятора тока (силы тяги), а следовательно, и ток боксующего двигателя. Уменьшается уставка регулятора и ток буксующего двигателя присутствует до тех пор, пока не прекратится буксование. По мере восстановления сцепления разность на входе блока 13 уменьшается, следовательно, сигнал на выходе соответственно увеличивается и, следовательно, ток буксующего двигателя растет до прежнего значения. Уменьшение тоJ ка буксующего двигателя происходит пропорционально глубине буксования и в каждый конкретный момент времени соответствует состоянию сцепления.
g Технико-экономические преимущества предлагаемого способа заключаются в то.м, что он позволяет реализовать предельную по условиям сцепления силу тяги и торможения, кроме того, позволяет уменьшить износ бардажей и тормозных колодок) так
как выявляет срыв сцепления в самый начальный момент и не дает развиваться процессу буксования или юза.
Формула изобретения
Способ регулирования силы тяги и торможения электроподвижного сост.ава при автоматическом управлении путем сравнения сигналов, пропорциональных заданной
5 и истинной скорости, сравнения полученного сигнала с сигналом пропорциональным заданному значению силы тяги и торможения и выделения минимального из них, и воздействия полученным сигналом на исполнительный орган, отличающийся тем, что, с целью реализации предельных по условиям сцепления сил тяги и торможения, сигнал, пропорциональный истинной скорости получают путем непрерывного выделения минимального при тяге и максимального при
торможении сигнала, пропорционального частоте вращения тяговых двигателей, сравнивают их с сигналами, пропорциональными частоте вращения каждого тягового двигателя, выделяют разность между ними
S6
и из этой разности - сигнал обратно про-I. Жулев О. И. и др. Электровоз | -3000.
порциональный ей.«Электротехническая промышленность. ТяИсточннки информации,говое и подъемно-транспортное электрообопринятые во внимание при экспертизерудование, М., № 6(39), 1975. с. ,610.
747747
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2013232C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
